1.本发明属于电源控制技术领域,具体涉及一种取力车载电源的负励磁控制方法。
背景技术:
2.取力车载电源中,为适应发动机转速的大范围变化带来的发电机端频率和电压大范围变化,用控制励磁电流来稳定发电机的端电压。控制环路为双闭环,外环是发电机端电压,内环是励磁电流。
3.车载的负载中有大量的感性负载,如空调、液压马达、甚至是纯电机,宽转速范围车载电源带感性负载启动时会产生的高电压问题。已有车载电源通过改造放大了逆变侧的主功率管igbt以适应感性负载投入时的大电流,使30kw的车载电源可以带动满载的感性负载,但是在带动某些大惯性特性负载如液压马达的情况下,励磁电流回调时,因为电机磁滞效应和其它复杂的电磁过程,即使励磁电流调到零,端电压仍然快速上升,带来安全上的巨大隐患,只能降功率使用,30kw的车载电源只能带15kw的液压马达,大浪费了容量。
4.现有技术在大转带范围内稳定输出电压的方法有励磁控制法、升降压控制法,并辅于制动保护法,但上述算法都不能解决带感性负载时产生的高电压,即使制动全开都无法降低电压,无法保证车载电源平稳运行,需要进行改进。
技术实现要素:
5.本发明提供一种取力车载电源的负励磁控制方法,目的是解决现有技术取力车载电源在带动大惯性特性负载时输出电压变化范围过大,存在安全隐患的问题。
6.在发电机宽转速范围内,通过调励磁电流还稳定端电压,采用负励磁控制方式,可以大大增加卸载和带感性负载时系统的调节能力。此时端电压会迅速升高,非常危险,需要将端电压迅速回调,通过迅速回调励磁电流来实现,调到零以后继续向负值调,以抵消磁滞带来的电压升高。但负励磁达到一定值以后,再往负的方向增加励磁电流,会使励磁电流-端电压的环路变成正反馈,系统失控。本专利通过一定控制算法避免失控,完成环路控制。
7.本发明的目的是通过如下技术方案实现的:
8.一种取力车载电源的负励磁控制方法,采用负励磁控制方式,当励磁电流回调时,带感性负载的情况下,调到零以后继续向负值调,以抵消磁滞带来的电压升高,负励磁控制方法包括:
9.s1、设计取力车载电源的负励磁控制方法所需电路;
10.s2、检测感性负载接入;
11.s3、采取降压启动法完成启动;
12.s4、采用多运算融合技术判断负励磁电流是否到顶;
13.s5、采用限幅方法在pid初始化时设限幅值;
14.s6、设置多层次过压保护防止负励磁变成正反馈。
15.进一步地,取力车载电源的负励磁控制方法所需电路包括励磁电流的功率主电
路,励磁电流的功率主电路采用桥式电路。
16.进一步地,检测感性负载接入的判断通过计算电压降的微分实现,输出电压骤降的过程为ms级则判断为感性负载接入,进行后续特殊控制。
17.进一步地,降压启动法完成启动时,缓启动的时间小于0.5秒。
18.进一步地,采用多运算融合技术判断负励磁电流是否到顶的方法包括:采用多种独立判断负励磁电流到顶的方法,通过加权比重融合在一起,独立判断负励磁电流到顶的方法包括:转速检测及转速匹配、方向截断法、通过直流电压与交流电压共同判断电压是否过压。
19.进一步地,转速检测及转速匹配的方法为:利用电压的微分即变化率来判断电压是否到顶,检测的转速达到电压到顶的速度作为负励磁的控制极限。
20.进一步地,方向截断法包括:当励磁电流微分方向未变,但电压微分方向变时,及时截断,并回复上一点的值。
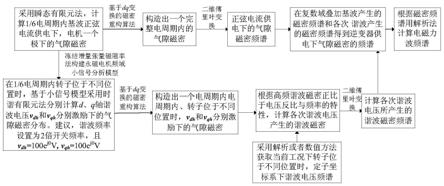
21.进一步地,通过直流电压与交流电压共同判断电压是否过压的过程中,当频率固定时,用同角度幅值比较法快速计算交流电压的有效值;当频率变动时,用交点幅值比较法快速计算交流电压的有效值。
22.进一步地,防止负励磁变成正反馈设置的多层次过压保护包括:第一重,软件电压极限值保护;第二重,直流电压极限值保护;第三重:硬件快速保护封锁pwm;第四重:制动。
23.本发明所取得的有益技术效果是:
24.通过负励磁控制来增强车载电源的带负载能力,特别是带感性负载的能力。采用负励磁控制抵消带感性负载时产生的高电压,使车载电源平稳运行。解决了现有技术取力车载电源在带动大惯性特性负载时输出电压变化范围过大,存在安全隐患的问题,具有突出的实质性特点和显著的进步。
附图说明
25.图1是本发明其中一种具体实施例的流程示意图;
26.图2是本发明其中一种具体实施例的励磁电流的功率主电路;
27.图3是本发明其中一种具体实施例的电压到顶检测。
具体实施方式
28.下面结合附图和具体实施方式对本发明的技术方案做进一步详细说明。显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明要求保护的范围。
29.如图1所示,一种取力车载电源的负励磁控制方法具体实施例,采用负励磁的控制方式,当励磁电流回调时,带感性负载的情况下,采用负励磁的控制方式回调速度很快,调到零以后,可以继续往负值调,以抵消磁滞带来的电压升高,解决现有技术输出电压变化范围过大的问题。
30.但是励磁电流往负值调节有很大风险,因为调节过了磁滞点,负励磁电流也会使电压升高,控制环路变成正反馈了,系统会崩溃,而且可以出现超高电压。如图1所示,本具
体实施例中使用了强制限幅、速度匹配法、微分法、方向截断法等算法来解决励磁电流往负值调节时存在问题,实现了车载电源的负励磁控制,可以带满载感性负载,具体实施方式如下:
31.s1、设计取力车载电源的负励磁控制方法所需电路
32.如图2所示,本具体实施例中取力车载电源的负励磁控制方法所需励磁电流的功率主电路设计为桥式电路,目的是实现输出正负励磁电流。
33.s2、检测感性负载接入
34.感性负载接入时,输出电压会骤降,这种降幅是电过程,不同于发动机油门的机械动作过程。前者是ms级,后则是百ms级,通过计算电压降的微分,即变化率,可以判断出是否为感性负载的接入,若判断为感性负载接入,进行后续特殊控制。
35.s3、采取降压启动法完成启动
36.如果判断出为感性负载接入,采取降压缓启动的控制方式,以防电流过大跳机。本具体实施例中缓启动的时间小于0.5秒。原因是电源接入的还有别的负载,根据国标要求,要在0.5秒内恢复。
37.s4、采用多运算融合技术判断负励磁电流是否到顶
38.采用几种独立判断负励磁电流到顶的方法,通过加权比重来融合在一起,起到及时判断,又不会误触发的效果,具体包括:
39.s4.1、转速检测及转速匹配
40.检测的转速达到电压到顶的速度,作为负励磁的控制极限。本具体实施例中利用电压的微分即变化率来判断电压是否到顶,如图3所示。
41.s4.2、方向截断法
42.当励磁电流微分方向未变,但电压微分方向变,及时截断,并回复上一点的值。
43.s4.3、通过直流电压与交流电压共同判断电压是否过压
44.通过直流电压与交流电压共同判断电压是否过压,需要快速计算交流电压的有效值,本具体实施例中当频率固定时,用同角度幅值比较法;当频率变动时,交点幅值比较法。
45.s5、采用限幅方法在pid初始化时设限幅值
46.计算一个固定值在pid初始化时设限幅值。计算方式根据实际情况选择,利用现有技术即可实现,此处不再赘述。
47.s6、设置多层次过压保护防止负励磁变成正反馈
48.本具体实施例中为防止负励磁变成正反馈,调节出超高电压,设置了四重过电压保护:第一重,软件电压极限值保护;第二重,直流电压极限值保护;第三重:硬件快速保护封锁pwm;第四重:制动。
49.本具体实施例所取得的有益技术效果是:
50.应用于通过励磁控制来稳定端电压的宽转速范围的大功率取力车载电源上时,通过负励磁控制来增强车载电源的带负载能力,特别是带感性负载的能力。
51.本具体实施例中车载电源有带感性负载的要求,但是带感性负载时,输出电压会被大大拉低,则励磁会超调很大,转速上来后,电压升高,励磁系统惯性大,励磁电流下降跟踪慢,此时还有电枢反应和剩磁的作用,过程中会产生高电压,持续时间也长,甚至百ms级别,危险性大,对器件的耐压也产生很大压力。使用本具体实施例中所述的负励磁控制,可
以抵消上述因素产生的高电压,使车载电源平稳运行。解决了现有技术取力车载电源在带动大惯性特性负载时输出电压变化范围过大,存在安全隐患的问题。
52.采用本具体实施例,30kw的车载电源可以带30kw的电机,使用过程中不会出现1.2倍以上的高电压,高耐压等级的器件不再是必须选用,降低了成本。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。