1.本发明涉及大数据采集与处理领域,具体的说,涉及了一种基于多传感器的越野摩托车运动识别方法及设备。
背景技术:
2.越野摩托车等单轨迹运动车辆具有体积小,运动灵活等特点,因此成为我国以及大多中小国家日常出行的主要交通工具。目前国内外对越野摩托车运动情况的研究主要在于从机理分析的角度对越野摩托车模型进行抽象简化,建立运动学或动力学方程,以此求得越野摩托车运动过程中各个不同部位之间的相互联系与制约。但是由于越野摩托车等单轨迹车辆的自由度较多,因此运行时不同部位相互作用,难以建立出准确的运动模型,且由于模型中理想化条件相对较多,也使得实验结果在真实的运动场景中准确度较低。
3.考虑到越野摩托车的建模较为复杂,并且越野摩托车作为公路上最危险的交通工具之一,其运动的稳定性对于驾驶员的行车安全有着较为重要的影响,传统的机理分析很难实时准确的反应出越野摩托车在不同运动场景中的实时运行情况。
4.因此,提出一种基于多传感器的越野摩托车运动识别方法是尤为重要的,通过检测车辆运行过程中各部分相互之间的数据变化,分析彼此之间的联系,能够更为准确的反应出越野摩托车运动过程中的状态,并通过较少的特征对越野摩托车不同的运动场景进行分类决策,具有较好的研究与发展前景。
5.为了解决以上存在的问题,人们一直在寻求一种理想的技术解决方案。
技术实现要素:
6.本发明的目的是针对现有技术的不足,从而提供了一种基于多传感器的越野摩托车运动识别方法,还提供了基于上述方法的计算机设备、可读存储介质以及计算机程序产品。
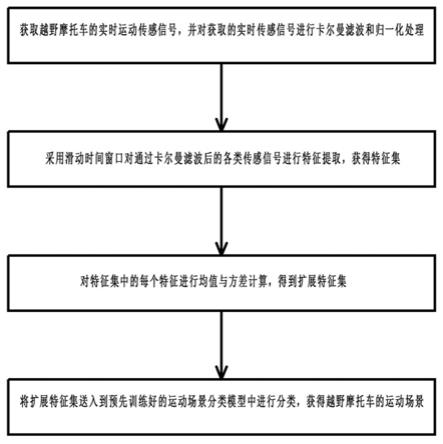
7.为了实现上述目的,本发明所采用的技术方案是:一种基于多传感器的越野摩托车运动识别方法,具体包括以下步骤:步骤1,获取安装在越野摩托车上的各类传感器实时采集的运动传感信号,并对获取的运动传感信号进行卡尔曼滤波;所述运动传感信号包括车把转角传感信号、油门转角传感信号、前减震位移传感信号、后减震位移传感信号、前轮转速传感信号、后轮转速传感信号、车体三维加速度传感信号、车体三维偏转角传感信号、车体三维磁场传感信号、前叉三维加速度传感信号、前叉三维偏转角传感信号、前叉三维磁场传感信号、后架三维加速度传感信号、后架三维偏转角传感信号和后架三维磁场传感信号;步骤2,采用滑动时间窗口对步骤1中通过卡尔曼滤波后的各类传感信号进行特征提取,获得特征集;步骤3,对特征集中的每个特征进行均值与方差计算,得到扩展特征集;
步骤4,将扩展特征集送入到预先训练好的运动场景分类模型中进行分类,获得越野摩托车的运动场景。
8.基于上述,按照以下方式训练所述运动场景分类模型:获取越野摩托车在每个运动场景下的大量运动传感信号,并对上述传感信号进行特征提取;将每个运动场景对应的特征作为训练数据,训练所述运动场景分类模型。
9.在执行步骤4之前,还可以执行以下步骤:获取安装在越野摩托车上的摄像机拍摄的环境图像,并对环境图像进行预处理和图像特征提取,并将提取的图像特征送入到预先训练好的运动环境分类模型中,识别出运动环境;选择该运动环境下的运动场景分类模型作为运动场景分类模型供步骤4使用。
10.基于上述,按照以下方式训练所述运动场景分类模型以及训练每种运动环境下的运动场景分类模型:针对每类运动环境,获取安装在越野摩托车上的摄像机实时拍摄的大量环境图像,以及获取安装在越野摩托车上的各类传感器在不同运动场景下实时采集的大量运动传感信号;对所有运动环境下的所有环境图像进行预处理和图像特征提取,并将提取的图像特征作为训练数据,训练所述运动场景分类模型;针对每类运动环境,对越野摩托车在不同运动场景下的大量运动传感信号进行特征提取,并将提取的特征作为训练数据,训练该类运动环境下的运动场景分类模型。
11.本发明还提供一种计算机设备,包括存储器、处理器及存储在存储器上的计算机程序,所述处理器执行所述计算机程序以实现前述方法的步骤。
12.本发明还提供一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现前述方法的步骤。
13.本发明还提供一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现前述方法的步骤。
14.本发明相对现有技术具有突出的实质性特点和显著的进步,具体的说,本发明中神经网络分类器并非基于理想化条件形成的,而是基于越野摩托车的油门、前后减震、前后车轮转速、车把转角、车辆加速度以及倾角等运动参数所训练的,由于这些运动参数能够准确反映出越野摩托车在运行过程中各部分相互之间的数据变化以及彼此之间的联系,因此,基于这些实时运动参数所训练的神经网络模型,能够更为准确的反应出越野摩托车当前的运动场景。
15.本发明在实时采集越野摩托车的油门、前后减震、前后车轮转速、车把转角、车辆加速度以及倾角等参数的同时利用神经网络分类器进行运动场景的同步识别分类,无需等待实现大量数据采集完成后再进行数据分析与运算,为分析和学习人类驾驶经验和决策逻辑提供基础,为构建无人越野摩托提供条件。
16.本发明中针对滑动时间窗提取后的特征数据只需进行均值与方差的计算,无需进行复杂的特征处理,特征数少,分类识别速度快。
17.本发明还建立了不同运动环境下的运动场景分类模型,使用时,先识别出越野摩托车当前所属的运动环境,再基于该运动环境对应的运动场景分类模型进行运动场景识
别,通过环境识别,减少了环境因素对运动场景识别的影响,进一步提高了运动场景的识别精准度。
附图说明
18.图1是本发明实施例1的流程示意图。
19.图2是本发明实施例2的流程示意图。
具体实施方式
20.下面通过具体实施方式,对本发明的技术方案做进一步的详细描述。
21.实施例1如图1所示,一种基于多传感器的越野摩托车运动识别方法,具体包括以下步骤:步骤1,获取安装在越野摩托车上的各类传感器实时采集的运动传感信号,并对获取的运动传感信号进行卡尔曼滤波。
22.具体的,所述运动传感信号包括车把转角传感信号、油门转角传感信号、前减震位移传感信号、后减震位移传感信号分别由安装在越野摩托车车把、油门、前减震以及后减震上的霍尔拉线传感器进行采集;其中,油门转角传感信号由300mm霍尔拉线传感器来检测,使用时将300mm霍尔拉线传感器的拉线端穿过金属外壳进入越野摩托车油门线的滑道并最终固定于越野摩托车油门旋转的塑料内把上,另一端固定于越野摩托车车把上的金属卡口下方安装的方形可拆卸金属器件上,其中,方形可拆卸金属器件位于越野摩托车油门拉线固定端的正下方,使油门拉线垂直,避免产生误差;当油门把转动时,通过所述霍尔拉线传感器记录油门旋转的角度,且金属器件可通过变换,搭载不同的检测器件,为日后开发打下基础;车把转角传感信号由500mm霍尔拉线传感器来检测,使用时,将500mm霍尔拉线传感器的拉线端固定于越野摩托车架的固定位置上,将另一端固定于越野摩托车车把上,当其车把发生转动时,可实时记录车把转角;在测量车把转角和油门转角时,通过霍尔拉线传感器的线性测量替代传统的转动测量,实战效果良好,可通过数据插值拟合准确换算出油门以及车把转角在某时刻旋转的角度,反映直观、安装简便、可靠性高。
23.前轮转速传感信号、后轮转速传感信号分别由安装在越野摩托车前轮和后轮上的霍尔接近开关进行采集;具体的,将一定数量的s级磁铁分别固定于前后车轮上,前轮通过金属卡口将霍尔接近开关固定于前叉上,后轮通过金属卡口将霍尔接近开关固定于后架上,通过霍尔接近开关电位翻转,实现车辆运行过程中前后轮车速的测量。
24.车体三维加速度传感信号、车体三维偏转角传感信号、车体三维磁场传感信号由安装在越野摩托车车体上的九轴传感器进行采集;前叉三维加速度传感信号、前叉三维偏转角传感信号、前叉三维磁场传感信号由安装在越野摩托车前叉上的九轴传感器进行采集;后架三维加速度传感信号、后架三维偏转角传感信号和后架三维磁场传感信号由安装在越野摩托车后架上的九轴传感器进行采集;
采用arduino 33 ble sense开发板板载的九轴传感器进行检测,分别在越野摩托车前叉、座椅下方的车体以及后架上固定安装arduino 33 ble sense开发板的防水盒,并将三个开发板与车载通信模块连接,实现对前叉、车体和后架的三维加速度、三维偏转角以及三维磁场等传感数据的采集和上传;并且,除arduino 33 ble sense开发板以外,所有传感器均连接数据采集卡,将所采集的信号进行分类存储。
25.在实现数据采集后,通过无线数传模块将采集的不同运动数据,包括油门、前叉三维方向加速度、车把转角等35个传感信号实时传输至上位机;上位机对接收的传感器信号进行数据预处理,包括卡尔曼滤波以及归一化处理等,去除摩托车运行过程中的数据误差与扰动。
26.步骤2,采用滑动时间窗口对步骤1中通过卡尔曼滤波后的各类传感信号进行特征提取,获得特征集。
27.可以理解,时间窗口可根据不同路况进行调节,通过时间窗口对运动传感信号进行实时特征提取,可以进一步降低运动过程中的偶然误差;优选的,所述时间窗口为10毫秒滑动窗口。
28.步骤3,对特征集中的每个特征进行均值与方差计算,得到扩展特征集,通过增加特征数据的个数可以提高不同运动场景的分类成功率;另外,由于所述扩展特征集是由均值与方差组合的70个特征数据,特征数少,且无需复杂的特征处理,因此,计算速度快。
29.步骤4,将扩展特征集送入到预先训练好的运动场景分类模型中进行分类,获得越野摩托车的运动场景。
30.可以理解,在利用本方法之前,要按照以下方式训练所述运动场景分类模型:获取越野摩托车在每个运动场景下的大量运动传感信号,并对上述传感信号进行特征提取;将每个运动场景对应的特征作为训练数据,训练所述运动场景分类模型,其中,所述运动场景分类模型为70输入5输出的三层神经网络,输出的运动场景包括直线行驶、上坡运动、下坡运动、左转弯运动、右转弯运动。
31.可以理解,在开始前,需要将各个传感器与上位机建立连接,若未连接成功,则重新等待连接,直到连接成功后开始进行校准,并在校准完成后再开始运动传感信号的采集与上传。
32.现有的越野摩托车建模过程中,为了建模方便,需要设置很多理想化条件,例如,其中一个理想化条件就是减震不变,即将减震作为刚体。但越野摩托车属于单轨迹车辆,自由度较多,运行时不同部位相互作用,任何一个部件的变化将会导致另一个部件也随之变化,如果无法准确获取不同部件之间的相互作用,则将无法得到准确的运动学模型,也就无法精准控制越野摩托车的运动状态。
33.本发明中神经网络分类器并非基于理想化条件形成的,而是基于越野摩托车的油门、前后减震、前后车轮转速、车把转角、车辆加速度以及倾角等运动参数所训练的,由于这些运动参数能够准确反映出越野摩托车在运行过程中各部分相互之间的数据变化以及彼此之间的联系,因此,基于这些实时运动参数所训练的神经网络模型,能够更为准确的反应
出越野摩托车当前的运动场景。
34.本发明在实时采集越野摩托车的油门、前后减震、前后车轮转速、车把转角、车辆加速度以及倾角等参数的同时利用神经网络分类器进行运动场景的同步识别分类,无需等待实现大量数据采集完成后再进行数据分析与运算,为分析和学习人类驾驶经验和决策逻辑提供基础,为构建无人越野摩托提供条件。
35.实施例2本实施例与实施例1的区别在于:如图2所示,在执行步骤4之前,获取安装在越野摩托车上的摄像机拍摄的环境图像,并对环境图像进行预处理和图像特征提取,并将提取的图像特征送入到预先训练好的运动环境分类模型中,识别出运动环境;选择该运动环境下的运动场景分类模型作为运动场景分类模型供步骤4使用。
36.可以理解,需要先按照以下方式训练所述运动场景分类模型以及训练每种运动环境下的运动场景分类模型:针对每类运动环境,获取安装在越野摩托车上的摄像机实时拍摄的大量环境图像,以及获取安装在越野摩托车上的各类传感器在不同运动场景下实时采集的大量运动传感信号;对所有运动环境下的所有环境图像进行预处理和图像特征提取,并将提取的图像特征作为训练数据,训练所述运动场景分类模型;针对每类运动环境,对越野摩托车在不同运动场景下的大量运动传感信号进行特征提取,并将提取的特征作为训练数据,训练该类运动环境下的运动场景分类模型。
37.本实施例为不同运动环境建立了各自的运动场景分类模型,使用时,先识别出越野摩托车当前所属的运动环境,再基于该运动环境对应的运动场景分类模型进行运动场景识别,通过环境识别,减少了环境因素对运动场景识别的影响,进一步提高了运动场景的识别精准度。
38.实施例3本实施例还提供一种计算机设备,包括存储器、处理器及存储在存储器上的计算机程序,所述处理器执行所述计算机程序以实现实施例1或实施例2所述方法的步骤。
39.实施例4本实施例还提供一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现实施例1或实施例2所述方法的步骤。
40.实施例5本实施例还提供一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现实施例1或实施例2所述方法的步骤。
41.最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制;尽管参照较佳实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者对部分技术特征进行等同替换;而不脱离本发明技术方案的精神,其均应涵盖在本发明请求保护的技术方案范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。