1.本发明属于鼠疫预警技术领域,具体涉及一种基于深度学习的鼠疫预测方法。
背景技术:
2.鼠疫主要通过病媒生物传播、接触传播和飞沫传播等,感染者早期会出现全身中毒的症状,包括高热,咳嗽,呼吸困难,甚至到后期会出现全身多脏器功能衰竭,休克,两到三天内死亡。因其传染性极强、传播方式多样化而难以预防。鼠疫长期困扰人民生活,提前预知预防困难,有居民感染或捕获鼠类进行检验后才可发现。根据《全国鼠疫监测方案》,现有的监测方案分为:(1) 宿主动物监测;(2)媒介监;(3)病原学及血清学监测。以上方法均需要大量时间及人力资源,预报具有一定延迟性,工作复杂而且费时、敏感性不高。另外缺乏完备的鼠疫疫情监测和信息管理系统,在较偏远的地方,由于那里经济相对落后,交通不发达及信息传递不方便等因素,疫情的监测与控制更难实现。
技术实现要素:
3.为了克服上述现有技术存在的不足,本发明提供了一种基于深度学习的鼠疫预测方法。
4.为了实现上述目的,本发明提供如下技术方案:
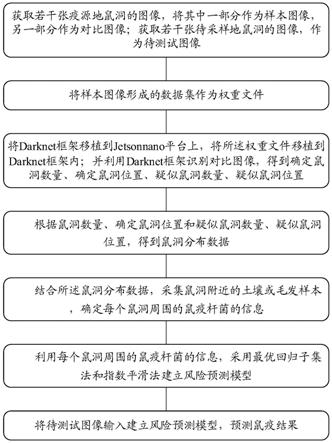
5.一种基于深度学习的鼠疫预测方法,包括以下步骤:
6.获取若干张疫源地鼠洞的图像,将其中一部分作为样本图像,另一部分为对比图像;获取若干张待采样地鼠洞的图像,作为待测试图像;
7.将样本图像形成的数据集作为权重文件;
8.将darknet框架移植到jetsonnano平台上,将所述权重文件移植到darknet 框架内;并利用darknet框架识别对比图像,得到确定鼠洞数量、确定鼠洞位置、疑似鼠洞数量、疑似鼠洞位置;
9.根据鼠洞数量、确定鼠洞位置、疑似鼠洞数量、疑似鼠洞位置,得到鼠洞分布数据;
10.结合所述鼠洞分布数据和区域地图,采集鼠洞附近的土壤或毛发样本,确定每个鼠洞周围的鼠疫杆菌信息;
11.利用每个鼠洞周围的鼠疫杆菌信息,采用最优回归子集法和指数平滑法建立风险预测模型;
12.将待测试图像输入建立风险预测模型,预测鼠疫结果。
13.优选的,所述将样本图像形成的数据集作为权重文件,具体步骤包括:
14.对每张所述样本图像进行画框、贴标签并生成pascalvoc格式的xml文件;
15.标定所述样本图像中的所有目标,设置每个所述目标标签;
16.将每个所述xml文件与其对应的所述目标和目标标签结合生成标注文件;
17.将所有所述标注文件集合形成数据集;
18.指定训练批次、训练轮数和权重;
19.对所述训练集的图像数据进行训练得到权重文件。
20.优选的,所述得到确定鼠洞数量、确定鼠洞位置和疑似鼠洞数量、疑似鼠洞位置的具体步骤包括:
21.在darknet框架下编写鼠洞脚本;
22.通过所述鼠洞脚本运行所述对比图像,生成所述对比图像的标记文件;
23.对所述标记文件运算,获得确定鼠洞数量、确定鼠洞位置和疑似鼠洞数量、疑似鼠洞位置。
24.优选的,所述建立风险预测模型的具体步骤包括:
25.选择鼠密度、鼠体染蚤率、鼠体蚤指数、洞干染蚤率、洞干蚤指数、巢穴染蚤率、巢穴蚤作为监测指数;
26.通过所述监测指数建立回归方程;
27.根据所述回归方程的解,设置三个级别的风险指标。
28.优选的,所述设置三个级别的风险指标的具体步骤包括:
29.对鼠密度和鼠洞密度的回归方程进行变换表示洞口系数;
30.利用所述洞口系数通过最优回归子集法建立鼠密度分析模型;
31.筛选疫源地主要影响因子;
32.根据筛选后的所述影响因子,利用指数平滑法处理鼠密度分析模型得到风险预测结果;
33.根据风险预测结果设置三个级别的风险指标。
34.优选的,还包括:通过采样车采集鼠洞附近的土壤或毛发样本;其中,所述采样车为apm2.8开源飞控履带无人车。
35.优选的,还包括:通过采样车采集区域信息,并采用apap图像配准算法构建区域地图,其具体包括以下步骤:
36.获取疫源地的地图视频,将所述地图视频抽帧处理得到若干地图图像;
37.将每个描述相同场景的地图图像分成一组,得到多组地图图像;
38.对每一组所述地图图像进行几何变换,将其转换成相同坐标系的图像,得到多个标准地图图像;
39.拼接多个所述标准地图图像,合并其重叠部分的像素值,保持其没有重叠部分的像素值使之生成地图画布;
40.通过混合算法对所述地图画布进行处理,得到标准区域地图。
41.本发明提供的一种基于深度学习的鼠疫预测方法具有以下有益效果:(1) 鼠疫监测是为了预防和控制鼠疫发生和流行而开展的一项长期的、连续性的工作。通过主动监测,系统收集人间和动物间鼠疫的相关信息,尽早发现疫情,及时采取控制措施,防止疫情的蔓延与流行,掌握疫情的动态和趋势,为鼠疫的预测预警和制定防治对策提供科学依据。(2)采样车控制采用开源飞控 apm2.8,具有自定义路径、实时图传等功能,同时可以选择远程遥控。由于防疫采样车使用的地图由服务器提供,鼠洞识别和最佳线路规划由服务器提供,这就意味着采样车可以专注于避障行驶和样本采集并能够携带更大容量的续航电池和更多的样本容器,合理地分配了空间和处理器资源。最佳的线路规划帮助防疫人员节省了采样时间同时,由防疫采样车采集疫源样本避免了防疫人员与病毒的直接接触,为防疫人员
的安全构建了有效的防护屏障,为预防鼠疫爆发提供了快捷、高效、低成本的解决方案。
附图说明
42.为了更清楚地说明本发明实施例及其设计方案,下面将对本实施例所需的附图作简单地介绍。下面描述中的附图仅仅是本发明的部分实施例,对于本领域普通技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
43.图1为本发明实施例1的一种基于深度学习的鼠疫预测方法流程图;
44.图2为本发明实施例1的采样车采用apap算法构建地图的方法流程图。
具体实施方式
45.为了使本领域技术人员更好的理解本发明的技术方案并能予以实施,下面结合附图和具体实施例对本发明进行详细说明。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
46.实施例1
47.本发明提供了一种基于深度学习的鼠疫预测方法,如图1所示,包括以下步骤:获取若干张疫源地鼠洞的图像,将其中一部分作为样本图像,另一部分为对比图像;获取若干张待采样地鼠洞的图像,作为待测试图像;将样本图像形成的数据集作为权重文件;将darknet框架移植到jetsonnano平台上,将权重文件移植到darknet框架内;并利用darknet框架识别对比图像,得到确定鼠洞数量、确定鼠洞位置、疑似鼠洞数量、疑似鼠洞位置;根据鼠洞数量、确定鼠洞位置、疑似鼠洞数量、疑似鼠洞位置,得到鼠洞分布数据;结合鼠洞分布数据和区域地图,采集鼠洞附近的土壤或毛发样本,确定每个鼠洞周围的鼠疫杆菌信息;利用每个鼠洞周围的鼠疫杆菌信息,采用最优回归子集法和指数平滑法建立风险预测模型;将待测试图像输入建立风险预测模型,预测鼠疫结果。
48.具体的,通过无人机在疫源地拍摄图像获取鼠洞图像。在拍摄过程中无人机的飞行高度为2.8
–
3.1米,飞行速度为1.0
–
1.2m/s,同时摄像机镜头垂直于地面。在本实施例中,进行可行性验证时采用的无人机型号为大疆mini2,对1平方公里内的区域,进行5点式抽样,每个点位面积为100m*100m,拍摄时间 20min,每个点位采用s型巡航,在视频拍摄完成后,对视频进行抽帧处理以获取图像,两个小时的视频时间,共计获取图像1500张。
49.具体的,将样本图像形成的数据集作为权重文件的具体步骤包括:采用 labelimg软件对每张样本图像进行画框、贴标签并生成pascalvoc格式的 xml文件;标定样本图像中的所有目标,设置每个目标标签;将每个xml文件与其对应的目标和目标标签结合生成yolo格式的标注文件;将所有yolo格式的标注文件集合形成数据集。采用yolov4对指定图像进行检测;指定训练批次、训练轮数和权重;指定gpu(rtx4000)对训练集的图像数据进行训练得到权重文件yolov4_last.weights。随着训练次数的增加以及训练设定值的更改,该作品识别率可高达92%。yolov4是一种单阶段目标检测算法,该算法在yolov3的基础上添加了一些新的改进思路如:输入端mosaic数据增强、cmbn、sat自对抗训练,backbone基准网络融合其他检测算法中的新思路如:cspdarknet53、 mish激活函数、dropblock操作,nect端的ssp与fpn pan结构,输出端的主要改进为训练时的损失函数clou_loss以及预测框筛选的dlou_nms。进一步提高了检测速度与精度。具体的,得到的确定鼠洞数量、确定鼠洞位置和
疑似鼠洞数量、疑似鼠洞位置的具体步骤包括:在darknet框架下编写鼠洞脚本;通过鼠洞脚本运行对比图像,生成对比图像的标记文件;对标记文件运算,获得确定鼠洞数量、确定鼠洞位置和疑似鼠洞数量、疑似鼠洞位置并保存在 answer.c文件下。其中,英伟达的jetsonnano是一块用于深度学习或者计算机视觉的gpu运算平台,其整合了128核maxwell架构的gpu及4核 arma57cpu。体积小,功耗只有5-10w。而darknet框架是一个较为轻型的完全基于c与cuda的开源深度学习框架。darknet框架完全由c语言实现,没有任何依赖项,可以使用opencv,易于安装和移植。同时darknet框架支持 cpu与gpu。
50.在本实施例中,构建是数据库是通过远程登录树莓派并进行连接,采用树莓派4b来搭建的服务器然后在服务器上搭建的mysql数据库,采用sql语句添加所得到的得到的确定鼠洞数量、确定鼠洞位置和疑似鼠洞数量、疑似鼠洞位置,得到鼠洞分布数据。
51.通过数据库中的鼠洞分布数据,规划车辆路线,车辆采用apm2.8开源飞控控制,具有自定义路径、远程遥控、实时图传等功能,以安全到达检测目的地。检测车通过机械臂采集土壤或毛发样本并保存至样品保存箱。通过四步检验法从样品中分离鼠疫杆菌,具体为显微镜涂片检查、分离培养、鼠疫噬菌体裂解试验和动物实验。由于鼠疫杆菌极具危险性,将可能存在的鼠疫杆菌样本送到防疫监测站进行检测。
52.在本实施例中,建立风险预测模型的具体步骤包括:选择鼠密度、鼠体染蚤率、鼠体蚤指数、洞干染蚤率、洞干蚤指数、巢穴染蚤率、巢穴蚤作为监测指数;通过监测指数建立回归方程;根据回归方程的解,设置三个级别的风险指标。
53.由于鼠密度与鼠洞密度之间是近似的正相关关系,对鼠密度和鼠洞密度的回归方程进行变换表示洞口系数,其中y为鼠密度,x为鼠洞密度,为洞口系数,
[0054][0055]
由上式可知洞口系数不是一个定值,在鼠洞密度随季节发生变化时,洞口系数也会有相应的改变。因此鼠密度与鼠洞密度的正相关并不等于两者呈正比关系,也就是说不等于洞口系数趋于定值。因此可以讲:洞口系数具有季节间的显著性差异,又有季节内相对稳定的两重性。故可以依据此建立鼠密度分析模型,建立模型方法利用最优回归子集法;利用洞口系数通过最优回归子集法建立鼠密度分析模型;筛选疫源地主要影响因子(筛选黄鼠疫源地、布氏田鼠疫源地、长爪沙鼠疫源地的主要影响因子及风险分级);根据筛选后的影响因子,利用指数平滑法处理鼠密度分析模型进行风险预测,指数平滑法的模型如下,
[0056]
es(t)=α
×
x(t-1) (1-α)
×
es(t-1)
[0057]
其中,es(t)表示时刻t的平滑值,x(t)表示时刻t的实际观测值;α为平滑常数,0≤α≤1;通过风险预测的结果设置风险指标,预报值时,预报为流行;时为不流行;时,报为高风险。对回归模型利用实际数据进行拟合,时,预测鼠疫流行的符合率均为100%。
[0058]
在本实施例中,述采样车为apm2.8开源飞控履带无人车,支持实时图传,远程控制,自定义路径等apm2.8开源飞控的所有功能,gps模块可选mtk3329 及支持ublox输出的
7mgps(与地面站配合自定义路径)数传模块选择433mhz 模块,避障系统采用超声波模块。采样车可以采用多种控制方式(遥控器控制、 andorid设备控制、地面站missionplanner控制)。图传采用山狗sj4000运动相机 600mw图传发射器。地面传输距离500m。
[0059]
通过采样车采集区域信息,并采用apap图像配准算法构建区域地图,如图2所示,具体包括以下步骤:获取疫源地的地图视频,将地图视频抽帧处理得到若干地图图像;将每个描述相同场景的地图图像分成一组,得到多组地图图像;对每一组地图图像进行几何变换,将其转换成相同坐标系的图像,得到多个标准地图图像;拼接多个标准地图图像,合并其重叠部分的像素值,保持其没有重叠部分的像素值使之生成地图画布。通过几何和光度偏移错误通常导致对象的不连续,并在两个图像之间的边界附近产生可见的接缝。因此,为了减小接缝的出现,通过混合算法对地图画布进行处理,得到标准地图。
[0060]
在本实施例中,通过搭建网页与androidapp,将所得鼠疫预测结果通过服务器传送至网页,用户可以通过登陆进本产品配套网站,通过网站首页内容及时获取最新的浓度信息。并且提供app给用户,以便居民实时查看防疫信息。
[0061]
以上实施例仅为本发明较佳的具体实施方式,本发明的保护范围不限于此,任何熟悉本领域的技术人员在本发明披露的技术范围内,可显而易见地得到的技术方案的简单变化或等效替换,均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。