1.本发明涉及车辆调度技术领域,特别是一种基于工业车辆链的车辆调度方法及系统。
背景技术:
2.目前,工业车辆(如叉车)之间的任务调度主要是基于云平台的调度方法,具体为云服务器根据工业车辆上传至云平台的数据,对场景进行数据建模,客观估测场景内的日平均搬运总量;建立完毕场景模型后,依据场景内的车辆配置情况,参考车辆的吨位与运输便利性设定车辆的搬运优先级,通过优先级算法对车队进行任务调度,实现货物的快速搬运。现有技术中,需要将工业车辆的数据上传至云服务器,由云服务器对车辆数据进行管理。但是目前通过云服务器对车辆数据进行管理仅仅是简单地进行数据存储或数据计算,云服务器无法感知车辆数据是否被篡改,一旦车辆数据被篡改,云服务器一方面不能及时将存储的车辆数据同步至对应的车辆,另一方面可能对篡改后的数据进行存储,并进行错误的计算,造成严重后果。
技术实现要素:
3.本发明的主要目的在于克服现有技术中的上述缺陷,提出一种基于工业车辆链的车辆调度方法及系统,工业车辆根据搬运次数和搬运时间实时计算出繁忙度,并根据所述繁忙度调度其他车辆,实现货物的快速搬运。
4.本发明采用如下技术方案:
5.一方面,本发明一种基于工业车辆链的车辆调度方法,包括:
6.重量传感器将叉货时检测到的货物重量及叉货时间发送给iot设备;
7.所述iot设备通过室内定位装置采集工业车辆的当前位置,获得货物起点区域;所述iot设备判断当前叉货任务是否为在所述货物起点区域的首次叉货,如果是,将所述叉货时间设置为起始时间;
8.所述重量传感器将检测到的卸货时间发送给所述iot设备;接收到所述卸货时间后,所述iot设备通过所述室内定位装置采集工业车辆的当前位置,获得货物终点区域;所述iot设备将搬运次数加1;
9.基于所述搬运次数、起始时间和卸货时间,所述iot设备计算所述工业车辆的繁忙度,并将所述繁忙度与预设值进行比较;如果所述iot设备判断出所述繁忙度大于所述预设值,则将货物相关数据和工业车辆相关数据同步至已建立的工业车辆链上的其他工业车辆。
10.优选的,基于所述搬运次数、起始时间和卸货时间,所述iot设备计算所述工业车辆的繁忙度,具体计算方式如下:
11.r=n/(etime-t)
12.其中,r表示繁忙度;n表示搬运次数;etime表示卸货时间;t表示起始时间。
13.优选的,所述iot设备判断采集到的货物起点区域与前一次采集到的货物起点区域的误差是否在第一预设误差范围内,如果是,判断为相同的货物起点区域。
14.优选的,所述iot设备判断采集到的货物终点区域与前一次采集到的货物终点区域的误差是否在第二预设误差范围内,如果是,判断为相同的货物终点区域。
15.优选的,所述车辆调度方法还包括:如果所述iot设备判断当前叉货任务为在所述货物起点区域的首次叉货,将所述搬运次数置0。
16.优选的,所述iot设备将搬运次数加1,具体包括:
17.所述iot设备判断货物终点区域与前一次采集到的货物终点区域是否相同,如果相同,所述iot设备将搬运次数加1;如果不同,将所述搬运次数置1,同时将所述起始时间重置为当次叉货时间。
18.优选的,所述货物相关数据包括所述货物起点区域和货物重量;所述工业车辆相关数据包括车辆车型。
19.优选的,所述重量传感器设置在货叉上;所述iot设备设置在所述工业车辆上;所述室内定位装置设置在所述工业车辆上,或者,在货物起点区域和货物终点区域的厂房内,分别设置有能够采集到所述工业车辆当前位置的室内定位装置。
20.另一方面,本发明一种基于工业车辆链的车辆调度系统,包括:iot设备、重量传感器和室内定位装置;所述iot设备与所述重量传感器和所述室内定位装置分别相连接;具体的,包括:
21.重量传感器将叉货时检测到的货物重量及叉货时间发送给iot设备;
22.所述iot设备通过室内定位装置采集工业车辆的当前位置,获得货物起点区域;所述iot设备判断当前叉货任务是否为在所述货物起点区域的首次叉货,如果是,将所述叉货时间设置为起始时间;
23.所述重量传感器将检测到的卸货时间发送给所述iot设备;接收到所述卸货时间后,所述iot设备通过所述室内定位装置采集工业车辆的当前位置,获得货物终点区域;所述iot设备将搬运次数加1;
24.基于所述搬运次数、起始时间和卸货时间,所述iot设备计算所述工业车辆的繁忙度,并将所述繁忙度与预设值进行比较;如果所述iot设备判断出所述繁忙度大于所述预设值,则将货物相关数据和工业车辆相关数据同步至已建立的工业车辆链上的其他工业车辆。
25.优选的,所述车辆调度系统还包括:终端设备;所述工业车辆链上的所有工业车辆均设置有所述终端设备,所述终端设备与所述iot设备相连接;当工业车辆链上的其他工业车辆接收到同步数据时,判断自身车型是否与同步数据中的车辆车型一致,如果一致,在所述终端设备上显示同步数据中的货物起点区域。
26.由上述对本发明的描述可知,与现有技术相比,本发明具有如下有益效果:
27.(1)本发明基于重量传感器获取货物重量、搬运起始时间和卸货时间,基于定位装置获取货物起点区域和终点区域,所述iot设备根据搬运次数和搬运时间(卸货时间和搬运起始时间的差值)实时计算出繁忙度,并根据所述繁忙度调度工业车辆链上的其他车辆,实现工业车辆链上各车辆的相互协作,最终实现货物的快速搬运;
28.(2)本发明当货物起点区域变化时,搬运起始时间执行重置;当货物起点区域或获
取终点区域变化时,搬运次数执行重置,保证了计算出的繁忙度是针对相同起点区域和终点区域,能够真实地反映出工业车辆当前的工作强度,防止进行误调度;
29.(3)本发明中,繁忙度高的工业车辆将将货物起点区域、货物重量和车辆车型等同步至车辆链上的其他工业车辆,一方面使得前来支援的其他工业车辆距离较近,实现快速支援,另一方面保证前来支援的车辆能够承担起搬运货物的重量,防止资源浪费;
30.(4)本发明无需将货物相关数据和工业车辆相关数据上传至云平台,通过所述重量传感器和室内定位装置采集到的数据及通过所述iot设备计算出的所有的数据均存储于工业车辆本身的iot设备中,保证了数据的安全性及可靠性;
31.(5)本发明根据所述iot设备计算出的繁忙度,将货物相关数据和工业车辆相关数据同步至已建立的工业车辆链上的其他工业车辆,由工业车辆链上的其他工业车辆根据货物相关数据和工业车辆相关数据判断出是否去货物起点区域进行支援,而不需要云平台进行复杂的建模运算及调度,实现了快速调度。
32.上述说明仅是本发明技术方案的概述,为了能够更清楚地了解本发明的技术手段,从而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下列举本发明的具体实施方式。
33.根据下文结合附图对本发明具体实施例的详细描述,本领域技术人员将会更加明了本发明的上述及其他目的、优点和特征。
附图说明
34.图1为本发明实施例的方法流程图;
35.图2为本发明实施例的详细流程图;
36.图3为本发明实施例的系统框图。
具体实施方式
37.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步的详细描述。
38.参见图1和图2所示,一方面,本发明一种基于工业车辆链的车辆调度方法,包括:
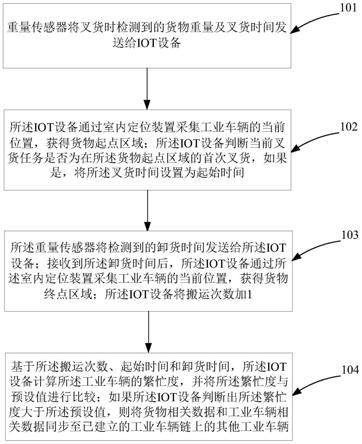
39.s101,重量传感器将叉货时检测到的货物重量及叉货时间发送给iot设备;
40.s102,所述iot设备通过室内定位装置采集工业车辆的当前位置,获得货物起点区域;所述iot设备判断当前叉货任务是否为在所述货物起点区域的首次叉货,如果是,将所述叉货时间设置为起始时间;
41.s103,所述重量传感器将检测到的卸货时间发送给所述iot设备;接收到所述卸货时间后,所述iot设备通过所述室内定位装置采集工业车辆的当前位置,获得货物终点区域;所述iot设备将搬运次数加1;
42.s104,基于所述搬运次数、起始时间和卸货时间,所述iot设备计算所述工业车辆的繁忙度,并将所述繁忙度与预设值进行比较;如果所述iot设备判断出所述繁忙度大于所述预设值,则将货物相关数据和工业车辆相关数据同步至已建立的工业车辆链上的其他工业车辆。
43.具体的,所述s101中,重量传感器将叉货时检测到的货物重量及叉货时间发送给
iot设备的具体时间点为本次要运输的货物全部装上货叉或工业车辆启动运输的时间点。
44.所述s103中,所述重量传感器将检测到的卸货时间发送给所述iot设备的具体时间点为工业车辆的货叉卸载完所有货物。
45.进一步的,所述iot设备可设置在所述工业车辆上任意位置,且与所述重量传感器和所述室内定位装置分别进行通信连接。
46.所述重量传感器可以设置在货叉上的任意位置,为了保证检测的准确性,所述重量传感器可设置一个或多个。包括多个重量传感器时,可采用如平均算法之类的算法对检测结果进行均衡,具体使用何种算法,本发明实施例不做具体限制。
47.一实施例中,所述室内定位装置可设置在所述工业车辆上。在另外的实施例中,在货物起点区域设置有能够采集到所述工业车辆当前位置(即货物起点区域)的室内定位装置,同时在货物终点区域的厂房内,设置有能够采集到所述工业车辆当前位置(即货物终点区域)的室内定位装置。为了保证检测的准确性,设置在所述工业车辆上的室内定位装置可以包括一个或多个,同样,设置在货物起点区域的室内定位装置可以包括一个或多个,设置在货物终点区域的室内定位装置也可以包括一个或多个。包括室内定位装置时,可采用如平均算法之类的算法对检测结果进行均衡,具体使用何种算法,本发明实施例不做具体限制。
48.所述s102中,所述iot设备判断当前叉货任务是否为在所述货物起点区域的首次叉货,如果是,将所述叉货时间设置为起始时间,具体包括:
49.所述iot设备判断当前叉货任务是否为在所述货物起点区域的首次叉货,如果是,将所述叉货时间设置为起始时间,同时将搬运次数置0。
50.具体的,所述iot设备判断当前叉货任务是否为在所述货物起点区域的首次叉货的方法为:判断所述起始时间是否为空或零或其他预设置的值,如果是,则判断为首次叉货,将当前次获得的叉货时间赋值为所述起始时间;如果不是,直接进行下一步。当然,也可以设置其他的标志来进行判断,但不管采用何种方式,首次叉货时,都需要把当前次获得的叉货时间赋值为所述起始时间,供后续计算繁忙度使用。
51.所述s102和s103中,涉及到货物起点区域和货物终点区域。需要说明的是,这里的区域允许有一定的误差。
52.具体的,所述iot设备判断采集到的货物起点区域与前一次采集到的货物起点区域的误差是否在第一预设误差范围内,如果是,判断为相同的货物起点区域;否则判断为不相同的货物起点区域。
53.所述iot设备判断采集到的货物终点区域与前一次采集到的货物终点区域的误差是否在第二预设误差范围内,如果是,判断为相同的货物终点区域;否则判断为不相同的货物终点区域。
54.所述第一预设误差范围和所述第二预设误差范围可以根据防止货物的场区大小来配置,默认情况下,为3米。
55.所述s103中,所述iot设备将搬运次数加1,具体包括:
56.所述iot设备判断货物终点区域与前一次采集到的货物终点区域是否相同,如果相同,所述iot设备将搬运次数加1;如果不同,将所述搬运次数置1,同时将所述起始时间重置为当次叉货时间。
57.所述s104中,基于所述搬运次数、起始时间和卸货时间,所述iot设备计算所述工业车辆的繁忙度,具体计算方式如下:
58.r=n/(etime-t)
59.其中,r表示繁忙度;n表示搬运次数;etime表示卸货时间;t表示起始时间。
60.本实施例中,所述货物相关数据包括所述货物起点区域和货物重量;所述工业车辆相关数据包括车辆车型。
61.所述s104之后,还包括:
62.工业车辆链上的其他工业车辆收到同步数据后取出车型车辆车型,判断是否与本车车型一致,如果一致,则取出所述货物起点区域,并在终端设备的显示器上显示具体的位置以及货物重量信息,司机根据现有的任务判断是否去所述货物起点区域支援。
63.需要说明的是,工业车辆链的建立方法及工业车辆链中工业车辆进行数据同步的方法参见已申请专利201910098913.4,本实施例不做重复说明。
64.本实施例中,一种基于工业车辆链的车辆调度方法还包括:
65.s105,重复步骤s101至s104,直至所有货物的搬运。
66.本实施例中,所述工业车辆为叉车,如下以叉车为例,对上述过程进行具体说明。
67.令厂房x区域(货物起点区域)有1000件货物需要车辆类型为c的叉车搬运到y区域(货物终点区域),厂区内共有10辆叉车(f1,f2
…
f10),且分散厂区内,这10辆叉车上均装有iot设备,并且都组建成叉车链,繁忙度r值设定为0.5。此时叉车f1进入x区域,详细过程如下:
68.(1)f1叉起货物,货叉上的传感器将货物重量weight与叉货时间stime(8:00am)发送给f1上的iot设备,iot设备通过室内定位装置收集货物起点区域slocation,iot设备判断这是f1在此区域第一次叉起货物,因此将本次叉货时间赋值给当前时间,即t=stime;
69.(2)f1将货物动到y区域,并收集传感器此时的卸货时间etime(8:03am),以及此时检测到的货物终点区域elocation;
70.(3)iot设备将搬运次数n加1,
71.(4)计算r值,r=n/(etime-t)=1/(8:03-8:00)=1/3min=0.3
72.(5)重复如上步骤(1)至(4),当到n=11时,etime=8:17,计算r=11/(8:17-8:00)=11/17=0.65,即r大于0.5;
73.(6)f1将slocation、车辆车型c、货物重量weight广播至同一条链上的叉车,链上的其他叉车收到这些数据后判断是否适合执行此任务,即车辆车型与c是否一致,如果一致则将货物起点区域在终端设备上显示出来,司机根据实际情况选择是否去支援。
74.参见图3所示,另一方面,本发明一种基于工业车辆链的车辆调度系统,包括:iot设备301、重量传感器302和室内定位装置303;所述iot设备301与所述重量传感器302和所述室内定位装置303分别相连接;具体的,包括:
75.重量传感器302将叉货时检测到的货物重量及叉货时间发送给iot设备301;
76.所述iot设备301通过室内定位装置303采集工业车辆的当前位置,获得货物起点区域;所述iot设备301判断当前叉货任务是否为在所述货物起点区域的首次叉货,如果是,将所述叉货时间设置为起始时间;
77.所述重量传感器302将检测到的卸货时间发送给所述iot设备301;接收到所述卸
货时间后,所述iot设备301通过所述室内定位装置303采集工业车辆的当前位置,获得货物终点区域;所述iot设备301将搬运次数加1;
78.基于所述搬运次数、起始时间和卸货时间,所述iot设备301计算所述工业车辆的繁忙度,并将所述繁忙度与预设值进行比较;如果所述iot设备301判断出所述繁忙度大于所述预设值,则将货物相关数据和工业车辆相关数据同步至已建立的工业车辆链上的其他工业车辆。
79.本实施例中,所述车辆调度系统还包括:终端设备304;所述工业车辆链上的所有工业车辆均设置有所述终端设备304,所述终端设备304与所述iot设备301相连接;当工业车辆链上的其他工业车辆接收到同步数据时,判断自身车型是否与同步数据中的车辆车型一致,如果一致,在所述终端设备304上显示同步数据中的货物起点区域。
80.最后,还需要说明的是,在本实施例中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。此外,上述的步骤标识只是为了方便阅读,具体实施时,可以对步骤进行对应的调整。
81.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
82.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。