1.本实用新型属于农机技术领域,特别是涉及一种玉米根茬动态视觉识别采样系统。用于农业玉米根茬在田间秸秆占比情况及根系形态反映作物生长情况的相关研究,实现玉米根茬形态特征的数字化获取。
背景技术:
2.秸秆中蕴涵巨大的养分资源,秸秆还田是培肥地力的农作增产措施,也是解决焚烧秸秆引起污染的直接手段,秸秆还田占比的多少直接影响种子的出苗率及腐熟剂的使用量。国内外秸秆相关研究多对地表秸秆覆盖率进行测算,对根茬在田间的含量只采用估算方法,不能够准确测算田间秸秆总量。根系形态可有效反映在该土壤环境中作物成熟后的生长状态,目前相关研究工作未见对根系进行大面积采样进行分析,其主要原因是秸秆根茬提取工作多为人工形式,劳动量大,根茬提取机械偶有研究,但主要为提取秸秆,而非提取秸秆样本,损伤性较大,人工提取的样本需运回实验室进行储藏并通过相机拍照、量尺等方式,研究其结构形态,面对大量根茬采样工作,耗时费力且成本投入大,无法有效大面积开展相关研究。现有视觉识别秸秆相关技术是对地表秸秆测算秸秆在田间覆盖率进行测算,根系在土壤中,无法直接获取,且受自然环境影响,需要在相对的稳定光源下进行,因此,目前根茬在田间的占比情况一般还采用固定系数进行估算,无法满足田间秸秆总量的准确测算。
技术实现要素:
3.针对上述存在的大量玉米根茬样本提取工作效率低、劳动强度大及动态采样难等技术问题。本实用新型提供一种玉米根茬动态视觉识别采样系统,通过根茬提取装置将玉米根茬输送至采样识别箱内,玉米根茬在箱内行进过程中,对玉米根茬进行数字化批量采样,采样数据包含相对采集点的三参数定位坐标、样本外观图像及深度图像,并记录在采样系统的存储器中,供用户后续研究使用。
4.本实用新型的目的是通过以下技术方案来实现的:
5.本实用新型一种玉米根茬动态视觉识别采样系统,包括样本输送带上、设置在样本输送带上的样本采集箱,所述样本采集箱包括系统控制器、定位天线、作业状态传感器、激光雷达相机、位置传感器、光源组件及照度传感器,所述系统控制器及定位天线均安装在样本采集箱外部上方,所述作业状态传感器、激光雷达相机、光源组件均安装在样本采集箱内部上方,照度传感器固定在样本采集箱中下部,位于样本输送带两侧,位置传感器安装在样本采集箱内底部,位于样本输送带两侧,检测样本位置,作业状态传感器、激光雷达相机、位置传感器、光源组件及照度传感器分别连接系统控制器,在样本采集箱出入口两侧均设置有遮光帘。
6.进一步地,所述作业状态传感器固定在样本采集箱内侧顶部,位于玉米根茬入口处,判断玉米根茬在输送带的有无状态。
7.进一步地,所述激光雷达相机固定在样本采集箱内侧顶部中央位置,采集并存储玉米根茬的图像。
8.进一步地,所述的光源组件由用于视觉识别的高密度led条形光源组成,设置8组,对称分置于激光雷达相机两侧。
9.进一步地,所述位置传感器为三组,分别位于采集箱内入口、中部及出口处三个位置。
10.进一步地,还是设置有标尺,安装在样本采集箱内与输送带连接的底部两侧。
11.进一步地,所述的遮光帘由多条遮光带并列设置构成。
12.进一步地,所述输送带上相同间隔设有橡胶挡板,玉米根茬位于两个橡胶挡板之间,玉米根茬随输送带通过样本采集箱采样。
13.本实用新型的有益效果为:
14.本实用新型可有效缩短用户根茬采样的工作流程,改变传统的大量样本收集、运输、整理、储藏及拍照等繁复过程,节省人力及物理成本,提高测算效率,实现了玉米根茬的数字化动态采样,提高玉米根茬在田间占比测算的准确性,为用户对秸秆根茬在田间的含量及作物根系生长大数据分析工作提供助力。
附图说明
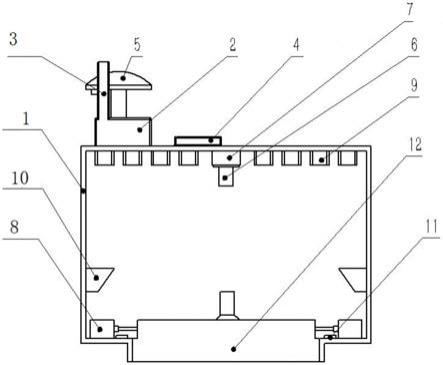
15.图1为本实用新型的平面结构示意图。
16.图2为本实用新型的立体结构示意图。
17.图中:1.采集箱,2.主机,3.显示器,4.键盘,5.定位天线,6.作业状态传感器,7.激光雷达相机,8.位置传感器,9.光源组件,10.照度传感器,11.标尺,12.输送带,13.遮光带,14.玉米根茬,15.前挡板。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
19.实施例:本实用新型一种玉米根茬动态视觉识别采样系统,包括样本输送带12和设置在样本输送带12上的样本采集箱1,所述样本采集箱1包括系统控制器、定位天线5、作业状态传感器6、激光雷达相机7、位置传感器8、光源组件9及照度传感器10,所述系统控制器及定位天线5均安装在样本采集箱1外部上方,作业状态传感器6、激光雷达相机7、光源组件9均安装在样本采集箱1内部上方,照度传感器10固定在样本采集箱1中下部,位于样本输送带12两侧,位置传感器8安装在样本采集箱1内底部,位于样本输送带12两侧,检测样本位置,作业状态传感器6、激光雷达相机7、位置传感器8、光源组件9及照度传感器10分别连接系统控制器,在样本采集箱1出入口两侧均设置有遮光帘13。
20.所述的样本采集箱1安装在根茬提取机具的输送带框架上,所述输送带13上相同间隔设有橡胶挡板,本例输送带13上每间隔35cm有橡胶挡板,玉米根茬14位于两个挡板之间,样本采集箱长度为70cm,玉米根茬14随输送带13通过样本采集箱1后,落回田里,在此过程中,玉米根茬动态视觉识别采样系统完成对根茬的数字化采样。
21.进一步地,本例所述系统控制器由系统主机3、显示器3、键盘4连接构成,设有电源输入输出等接口,连接系统电源。
22.进一步地,本例所述的作业状态传感器6固定在样本采集箱1顶部内侧,位于玉米根茬14入口处,用于判断玉米根茬14在输送带13的有无状态,便于系统控制器的主机2确定获取的玉米根茬14样本的有效性。
23.进一步地,本例所述激光雷达相机固定在样本采集箱1内侧顶部中央位置,采集并存储玉米根茬14的图像。激光雷达相机7包含rgb传感器、深度传感器及惯性测量单元,系统主机1可根据用户设置,获取并存储玉米根茬14的rgb图像及深度图像。
24.进一步地,本例所述的位置传感器8安装在采集箱1底部内两侧,所述位置传感器8为三组,分别位于采集箱1内入口、中部及出口处三个位置。当玉米根茬14的前挡板15经过位置传感器8时,依次触发进行拍照,位置传感器8安装位置可根据用户需求进行调节,触发后的连续拍照次数及时间间隔可通过系统主机2设置。每次拍照代表目标秸秆的rgb图像及深度图像被存储一次。系统主机2提供了3个位置传感器8接口,分别为入、中、出,按照传感器安装的实际位置连接即可。
25.所述的光源组件9由用于视觉识别的高密度led条形光源组成,设置8组,对称分置于激光雷达相机两侧。8组高密度led条形光源在系统中设定照度值及浮动值,由系统主机2对光源组件9的亮度进行自动控制。
26.所述的照度传感器10安装在样本采集箱1内侧方中下部,位于输送带两侧,用于采集近玉米根茬14的受光照度数据,可在显示器3中观察系统主机2内的明暗程度是否符合采样要求,在系统主机2内的设置对照度值及浮动值进行调节。
27.进一步地,本例还是设置有标尺11,安装在样本采集箱1内与输送带13连接的底部两侧。每张采集到的图像均包含标尺,有助于用户对图像是否产生畸变进行判断与校正。
28.进一步地,本例所述的遮光帘12由多条遮光带并列设置构成,用于遮挡采集箱外光,增强玉米根茬采样质量。
29.所述的定位天线5与系统主机2通过数据线连接,为系统主机2获取的各个玉米根茬14提供对应的厘米级定位坐标数据。定位天线5可根据用户需要,安装在根茬提取机具或拖拉机上,系统主机2为其提供根茬提取点与卫星天线相对距离的x,y坐标参数设置,有助于用户得到根茬绝对位置坐标。
30.本实用新型的工作过程:
31.在本实用新型秸秆根茬提取机具运行时,在键盘4按启动键,系统主机2记录当前启动点的定位坐标,当玉米根茬14通过遮光帘12至作业状态传感器6下方时,系统主机2记录第一个玉米根茬14的定位坐标。
32.进一步地,当玉米根茬14所在的前挡板15经过第一个位置传感器8时,系统主机2记录照度传感器10采集的数据,并控制激光雷达相机7获取玉米根茬14入口侧视rgb图像及深度图像,当玉米根茬14所在的前挡板15经过第二个位置传感器8时,系统主机2记录照度传感器10采集的数据,并控制激光雷达相机7获取玉米根茬14俯视rgb图像及深度图像,当玉米根茬14所在的前挡板15经过第三个位置传感器8时,系统主机2记录照度传感器10采集的数据,并控制激光雷达相机7获取玉米根茬14出口侧视rgb图像及深度图像,至此,完成一个玉米根茬14的动态视觉识别采样,随输送带13送至的各个玉米根茬14,依次完成各个玉
米根茬14的采样。
33.进一步地,当全部采样结束后,在键盘4按停止完成玉米根茬14的动态采样,在系统主机2上,插入u盘介质,选择导出到u盘,完成采样数据的导出。
34.可以理解的是,以上关于本实用新型的具体描述,仅用于说明本实用新型而并非受限于本实用新型实施例所描述的技术方案,本领域的普通技术人员应当理解,仍然可以对本实用新型进行修改或等同替换,以达到相同的技术效果;只要满足使用需要,都在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
