1.本实用新型涉及饲喂装置领域,更具体涉及一种流浪动物户外投喂装置。
背景技术:
2.近年来,伴随着宠物数量的增多,流浪动物的数量也在飞速增长。部分城市设置有流浪动物救助站,为流浪动物提供吃饭和休息场所。但救助站的数量有限,面对庞大的流浪动物群体,救助站无法为更多的流浪动物提供食物,大多数流浪动物的基本温饱都成问题,以至于它们经常在垃圾堆里觅食。长期下来,不仅对流浪动物的健康造成影响,也对周边(例如居住区或公园)的卫生环境造成重大的影响。
3.有鉴于此,有必要对现有技术中的流浪动物的户外投喂方式予以改进,以解决上述问题。
技术实现要素:
4.本实用新型的目的在于公开一种流浪动物户外投喂装置,以自助的方式为流浪动物提供户外定量投喂。
5.为实现上述目的,本实用新型提供了一种流浪动物户外投喂装置,包括:设置于框架中的第一投放物容器,与所述第一投放物容器连接并输送食物的第一投料通道,接收所述第一投料通道输送食物并内置第一传感器的食料盒,与所述框架连接并内置第二传感器的第一感应板,输送装置以及控制系统;
6.所述输送装置包括驱动装置,飞轮,连接于所述飞轮的摆杆,及与所述摆杆铰接的活塞,所述驱动装置驱动所述飞轮转动,以通过所述摆杆驱动活塞在第一投料通道内作往复运动,推动第一投料通道内的食物输送至食料盒;
7.所述控制系统电连所述第一传感器,第二传感器及驱动装置。
8.作为本实用新型的进一步改进,所述第一投料通道包括与所述第一投放物容器相互连通的下料管道及与所述下料管道相互连通并延伸至所述食料盒上方的输料管道,所述活塞在输料管道中作往复运动,以推动自第一投放物容器下落的食物输送至食料盒。
9.作为本实用新型的进一步改进,所述输料管道呈水平布置,所述活塞在输料管道内作水平往复运动,以推动自第一投放物容器下落的食物输送至食料盒。
10.作为本实用新型的进一步改进,所述驱动装置以齿轮传动或者皮带传动的方式驱动飞轮转动。
11.作为本实用新型的进一步改进,所述流浪动物户外投喂装置,还包括:设置于框架中的第二投放物容器,与所述第二投放物容器连通并输送液体的第二投料通道,及设置于第二投料通道上的电磁阀,所述控制系统电连所述电磁阀,以通过电磁阀控制第二投料通道将自第二投放物容器输出的液体输送至所述食料盒。
12.作为本实用新型的进一步改进,所述食料盒隔离形成接收所述第一投料通道输出的食物的食物盒,及接收所述第二投料通道输出的液体的储液盒。
13.作为本实用新型的进一步改进,所述流浪动物户外投喂装置,还包括:所述框架围合形成的顶面设置太阳能电池板,以及固定在所述框架上供储存太阳能的储能装置,所述太阳能电池板电连所述储能装置。
14.与现有技术相比,本实用新型的有益效果是:
15.本实用新型提供一种流浪动物户外投喂装置,在第一感应板上设置第二传感器用以感应流浪动物的到来并为流浪动物备食,食料盒中设置第一传感器以检测食料盒内食物的重量并将重量数据传输至控制系统。当食料盒内食物的重量未达到控制系统预设的重量时,控制系统控制驱动装置驱动飞轮,通过摆杆驱动活塞在第一投料通道内作往复运动,以将自第一投放物容器下落的食物推出至食料盒,当达到控制系统预设的重量后,停止输送食物。以此,通过该投喂装置,实现自助式地对流浪动物进行定量投喂食物的目的。
附图说明
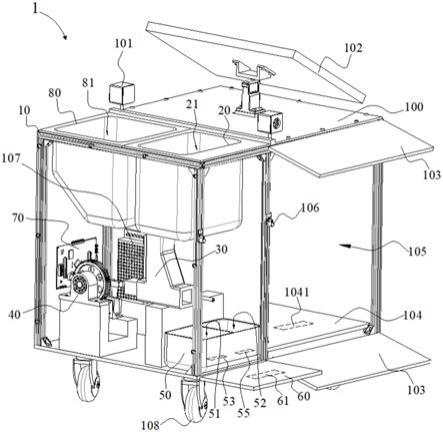
16.图1为本实用新型所揭示的一种流浪动物户外投喂装置的立体图;
17.图2为图1所示出的流浪动物户外投喂装置的局部示意图;
18.图3为图1所示出的流浪动物户外投喂装置的主视图;
19.图4为图3沿a-a方向的剖视图;
20.图5为图1所示出的流浪动物户外投喂装置的俯视图;
21.图6为图1所示出的流浪动物户外投喂装置的供电图。
具体实施方式
22.下面结合附图所示的各实施方式对本实用新型进行详细说明,但应当说明的是,这些实施方式并非对本实用新型的限制,本领域普通技术人员根据这些实施方式所作的功能、方法、或者结构上的等效变换或替代,均属于本实用新型的保护范围之内。
23.需要理解的是,在本技术中,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术方案和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术方案的限制。
24.参图1至图6所揭示的一种流浪动物户外投喂装置的一种具体实施方式。
25.参图1和图2所示,在本实施例中,流浪动物户外投喂装置1包括:设置于框架10中的第一投放物容器20,与第一投放物容器20连接并输送食物的第一投料通道30,接收第一投料通道30输送食物并内置第一传感器53的食料盒50,与框架10连接并内置第二传感器61的第一感应板60,输送装置40以及控制系统70,其中,控制系统70电连第一传感器53和第二传感器61。
26.如图1和图2所示,第一投料通道30包括与第一投放物容器20相互连通的下料管道31及与下料管道31相互连通并延伸至食料盒50上方的输料管道32。第一投放物容器20的内壁围合形成用于存储食物的储食腔体21,储食腔体21内的食物下落至与第一投放物容器20相互连通的下料管道31中。输送装置40包括驱动装置41,飞轮42,与飞轮42的盘面铰接的摆杆43,及与摆杆43铰接并与输料管道32的内壁配合的活塞44。活塞44的长度不小于下料管道31与输料管道32相互连通的区域的长度,以在需要停止输送食物的时候,将下料管道31
与输料管道32连通的部分隔断。控制系统70电连驱动装置41。
27.在本实施例中,第一传感器53和第二传感器61均为压力传感器,例如,可以配置为hx711压力传感器;驱动装置41通过主动轮45连接飞轮42。
28.当流浪动物站上第一感应板60,第二传感器61将检测到的流浪动物的重量传输至控制系统70,控制系统70启动流浪动物户外投喂装置1;同时,第一传感器53检测当前食料盒50内食物的重量,并传输至控制系统70,控制系统70将接收到的食料盒50内食物的重量与预设的重量进行对比,若食料盒50内食物的重量低于控制系统70预设的重量,控制系统70控制驱动装置41打开第一投料通道30开始输送食物,反之,则停止输送食物。
29.具体的,本实用新型的流浪动物户外投喂装置1输送食物的工作原理如下:当第一传感器53检测到当前食料盒50内食物的重量低于控制系统70预设的重量时,控制系统70驱动驱动装置41旋转,驱动装置41驱动与其相连接的主动轮45旋转,主动轮45驱动与其啮合的飞轮42转动。当飞轮42转动时,飞轮42驱动摆杆43转动,使得摆杆43驱动活塞44在输料管道32内作往复运动以打开第一投料通道30。在本实施例中,结合图2所示,食物的输送路径1000为:自第一投放物容器20下落至下料管道31中的食物继续下落至输料管道32,并通过活塞44的往复运动,将下落至输料管道32内的食物推出至食料盒50。当第一传感器53检测的重量达到控制系统70预设的重量时,控制系统70控制驱动装置41将活塞44驱动至下料管道31与输料管道32相互连通的区域,并将下料管道31与输料管道32连通的部分隔断,使得下料管道31内的食物无法继续输送至输料管道32内,以达到定量投食的目的。
30.需要进一步说明的是,本领域技术人员可合理预测到,驱动装置41也可通过皮带传动方式驱动飞轮42转动,只要能达到驱动飞轮42转动以通过摆杆43驱动活塞44的目的即可。在本实施例中,输料管道32呈水平布置,活塞44与输料管道32配合也呈水平布置,作为本实施方式的合理变形,输料管道32也可与水平方向呈一定角度的倾斜布置,只要保证活塞44在输料管道32内相对于输料管道32作往复运动,以通过活塞44将下落在输料管道32内的食物推出至食料盒50即可。驱动装置41包括但不限于步进电机。
31.参图1、图3至图5所示,流浪动物户外投喂装置1还包括:设置于框架10中的第二投放物容器80,第二投放物容器80的内壁围合形成用于存储液体的储液腔体81,与第二投放物容器80连通并输送液体的第二投料通道90,及设置于第二投料通道90上的电磁阀92,其中,控制系统70电连电磁阀92,以通过控制第二投料通道90将自第二投放物容器80输出的液体输送至食料盒50。
32.在本实施例中,食料盒50可用挡板54隔离形成接收第一投料通道30输出的食物(例如呈颗粒状态的狗粮或者猫粮)的食物盒51,及接收第二投料通道90输出的液体(例如水)的储液盒52,这样可以做到干湿分离,避免滋生细菌,为流浪动物提供更加健康安全的食物。此时,第一传感器53设置于食物盒51内,在储液盒52内增加第三传感器55,第三传感器55为压力传感器,用以检测储液盒52中液体的重量,第三传感器55电连控制系统70。当第三传感器55检测到储液盒52的重量未达到控制系统70预设的重量时,控制系统70控制电磁阀92将第二投料通道90打开,储液腔体81中的液体经第二投料通道90输出至储液盒52,直到第三传感器55检测到的重量达到控制系统70预设的重量,电磁阀92关闭第二投料通道90,停止输送液体。
33.本实用新型的流浪动物户外投喂装置1配置多个传感器用于实时采集信息,例如,
配置第二传感器61用于采集觅食的流浪动物的重量,配置第一传感器53用于采集食物盒51内食物的重量,配置第三传感器55用于采集储液盒52内液体的重量,并分别将采集到的重量数据实时传递给控制系统70,实现智能监控的目的。
34.参图1、图3和图4所示,该流浪动物户外投喂装置1还包括:设置于框架10上的红外传感器106,与框架10铰接的开关盒盖103,设置于框架10中并内置有第四传感器1041的第二感应板104,框架10围合形成的供动物休息的容纳室105,以及设置于流浪动物户外投喂装置1内壁的温湿度传感器107。在本实施例中,第四传感器1041为压力传感器。控制系统70电连第四传感器1041、红外传感器106和温湿度传感器107。在第二感应板104上设置第四传感器1041用以感应流浪动物进入容纳室105并采集流浪动物的重量,第四传感器1041将采集到的重量数据实时传递给控制系统70。
35.当设置在框架10上的红外传感器106检测到有流浪动物靠近流浪动物户外投喂装置1时,红外传感器106将检测到的信息传输至控制系统70,控制系统70将与框架10铰接的开关盒盖103调整为开的状态,此时,流浪动物可选择进入容纳室105在第二感应板104上休息或者等待救助。当流浪动物离开容纳室105,控制系统70接收到第四传感器1041检测到的重量数据为零,则关闭开关盒盖103。
36.设置于流浪动物户外投喂装置1内壁的温湿度传感器107用来检测环境中的温湿度,并通过控制系统70控制开关盒盖103的状态。例如,下雨天,温湿度传感器107检测到环境中的温湿度数据达到控制系统70预设的温湿度数据上限值时,控制系统70将开关盒盖103调整为开的状态,等待流浪动物进入容纳室105避雨。
37.参图1和图3所示,该流浪动物户外投喂装置1的框架10上设置有至少一个监控装置101,用于监测周边流浪动物的数量和周边流浪动物的生活习性。监控装置101电连控制系统70,以将监控装置101监测到的信息实时传递给控制系统70,监控装置101包括但不限于摄像头。
38.参图1、图3、图5和图6所示,该流浪动物户外投喂装置1还包括:设置于框架10围合形成的顶面100的太阳能电池板102,以及固定在框架10上供储存太阳能的储能装置109,储能装置109与太阳能电池板102电连。太阳能电池板102通过逆变器将太阳能转换成电能存储在储能装置109中,当装置运行时,储能装置109通过逆变器输出电能,为流浪动物户外投喂装置1中的控制系统70、第一传感器53、第二传感器61、第三传感器55、第四传感器1041、驱动装置41、电磁阀92、监控装置101、红外传感器106和温湿度传感器107持续提供电能。采用太阳能的方式进行供电,使得流浪动物户外投喂装置1具有节能环保的功效。
39.需要进一步说明的是,当第四传感器1041检测到有流浪动物在容纳室105内休息或避雨时,流浪动物户外投喂装置1不进行投喂。在一实施例中,该流浪动物户外投喂装置1还通过云服务器与智能终端通讯连接,控制系统70将收集到的所有数据(即投食的次数、流浪动物的重量、投食的重量、周边流浪动物的数量、周边流浪动物的生活习性、天气信息等)通信接入云服务器中,再通过云服务器传输至智能终端(可以为手机、电脑等),人们可通过智能终端后台实时监测投喂装置的状态和数据,做到远程管控。
40.参图1和图3所示,该流浪动物户外投喂装置1的框架10的下方还设置有可移动滚轮108,方便管理人员灵活安装,降低流浪动物户外投喂装置1的运维成本。
41.本实用新型提供的一种流浪动物户外投喂装置1,在第一感应板60上设置第二传
感器61用以感应流浪动物的到来并为流浪动物备食,食料盒50中设置第一传感器53以检测食料盒50内食物的重量并将重量数据传输至控制系统70。当食料盒50内食物的重量未达到控制系统70预设的重量时,控制系统70控制驱动装置41驱动飞轮42,通过摆杆43驱动活塞44在第一投料通道30内作往复运动,以将自第一投放物容器20下落的食物推出至食料盒50,当达到控制系统70预设的重量时,则停止输送食物,以此实现自助式地为流浪动物进行定量投喂的目的。
42.控制系统70可采用stm32单片机或者其他现有技术中的微处理器(mcu),鉴于控制系统70与图6中的电磁阀92、监控装置101、红外传感器106等检测器件或者控制器件之间的电控关系属于成熟现有技术,在此不再赘述。
43.上文所列出的一系列的详细说明仅仅是针对本实用新型的可行性实施方式的具体说明,它们并非用以限制本实用新型的保护范围,凡未脱离本实用新型技艺精神所作的等效实施方式或变更均应包含在本实用新型的保护范围之内。
44.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。