1.本实用新型涉及电动工具。更具体地,本实用新型涉及一种电动工具,其包括在壳体的顶部上的输入控制设备。
背景技术:
2.一些电动工具由用户接合触发器来致动。开关可以位于触发器附近,以改变电动工具的操作模式。例如,开关可以具有正向位置,反向位置和锁定位置。当开关处于正向位置时,触发器的用户致动使电动工具的输出主轴沿正向操作。当开关处于反向位置时,触发器的用户致动使电动工具的输出主轴沿反向操作。当开关处于锁定位置时,触发器的用户致动无效。开关在触发器附近的定位增加了电动工具的手柄部分的尺寸,并且可能在用户接合触发器时导致开关位置的无意改变。
技术实现要素:
3.在第一方面,提供了一种电动工具,其包括具有手柄部分和电动机壳体部分的壳体,以及位于电动机壳体部分内的电动机。电动工具还包括输入控制设备及控制器。输入控制设备位于电动机壳体部分的远离手柄部分的顶部上,并被配置为响应于输入控制设备的致动而产生模式信号。控制器包括电子处理器和存储指令的存储器,当由电子处理器执行时,该指令将控制器配置为接收模式信号,以及响应于模式信号,在电动工具的多个操作模式之间顺序地切换以选择多个操作模式中的一个。多个操作模式至少包括正向模式和反向模式。控制器还被配置为根据多个操作模式中的所选择的一个来操作电动机。
4.在第二方面,提供了一种用于改变电动工具的操作模式的方法。电动工具包括壳体,该壳体具有手柄部分和电动机壳体部分。该方法包括在电动工具的控制器处,从输入控制设备接收模式信号,输入控制设备位于电动机壳体部分的顶部上。该顶部是电动机壳体部分的与壳体的手柄部分相对的一侧。该方法还包括响应于模式信号,在控制器中选择电动工具的多个操作模式中的一个。多个操作模式至少包括正向模式和反向模式。该方法还包括控制器根据多个操作模式中的所选择的一个来操作电动工具的电动机。
5.在第三方面,提供了一种电动工具,其包括具有手柄部分和电动机壳体部分的壳体,该手柄部分远离电动机壳体部分的底侧延伸。电动工具还包括位于电动机壳体部分内的电动机,以及输入控制设备,其位于电动机壳体部分的顶部上。输入控制设备被配置为响应于输入控制设备的致动而产生模式信号。电动工具还包括控制器,其包括电子处理器和存储指令的存储器,当由电子处理器执行时,该指令将控制器配置为从输入控制设备接收模式信号,其指示电动工具的多个操作模式中的所选择的一个。电动工具的多个操作模式至少包括正向模式和反向模式。控制器还被配置为响应于模式信号而根据电动工具的多个操作模式中的所选择的一个来操作电动机。
6.在上述电动工具和方法的一些实施例中,多个操作模式还包括电动工具锁定操作模式。
7.在上述电动工具和方法的一些实施例中,输入控制装置还被配置为接收多个致动,并且响应于多个致动中的每一个而产生模式信号。另外,控制器还被配置为在输入控制设备的每次致动时,从输入控制设备接收模式信号,以及响应于从输入控制设备接收的每个模式信号,在多个操作模式中的每一个之间顺序切换。
8.在上述电动工具和方法的一些实施例中,触发器位于壳体的手柄部分上,并位于电动机壳体部分的与输入控制设备相对的一侧上。
9.在上述电动工具和方法的一些实施例中,控制器还被配置为响应于触发器的致动而接收触发信号,并根据多个操作模式中的所选择的一个和触发信号来操作电动机。
10.在上述电动工具和方法的一些实施例中,输出主轴从电动机壳体部分延伸,并且控制器被配置成响应于触发器的致动而接收触发信号,并基于触发信号和多个操作模式中的所选择的一个来操作电动机,以控制输出主轴的旋转方向。
11.在上述电动工具和方法的一些实施例中,指示器设置在电动机壳体部分的顶部上,并且控制器还被配置为亮起指示器以指示多个操作模式中的所选择的一个。
12.在上述电动工具和方法的一些实施例中,电动工具的多个操作模式中的所选择的一个是正向模式。控制器还被配置:为从输入控制设备接收第二模式信号,其指示电动工具的多个操作模式中的反向模式,以及根据反向模式和响应于触发器的致动而由控制器接收到的触发信号来操作电动机。
13.通过考虑详细描述和附图,本实用新型的其他方面将变得显而易见。
附图说明
14.图1是根据本文描述的一些实施例的电动工具的侧视图。
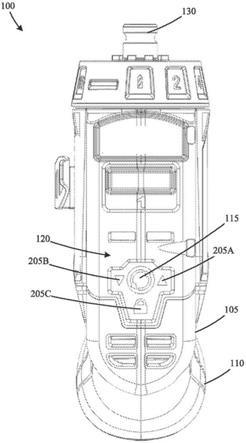
15.图2是图1的电动工具的俯视图。
16.图3是图1的电动工具的仰视图。
17.图4是图1的电动工具的后视图。
18.图5是图1的电动工具的正视图。
19.图6是根据本文描述的一些实施例的图1至图5的电动工具的简化框图。
20.图7是根据本文描述的一些实施例的控制图1至图6的电动工具的操作模式的方法的流程图。
具体实施方式
21.在详细解释任何实施例之前,应理解,实施例的应用不限于在以下描述中阐述或在附图中示出的配置细节和部件布置。实施例能够以各种方式实践或实施。另外,应理解,本文所使用的措词和术语是出于描述的目的,而不应被认为是限制性的。“包括”,“包含”或“具有”及其变体的使用意在涵盖其后列出的项目及其等同物以及其他项目。除非另有说明或限制,否则术语“安装”,“连接”,“支撑”和“联接”及其变体被广义地使用,并且包括直接和间接安装,连接,支撑和联接。
22.另外,应理解,实施例可以包括硬件,软件和电子部件或模块,出于讨论的目的,其可以被示出和描述为好像大多数部件仅在硬件中实现。然而,本领域的普通技术人员并基于对本详细描述的阅读将认识到,在至少一个实施例中,电子的方面可以在软件中实现(例
如,存储在非暂时性计算机可读介质上),该软件可由一个或多个处理单元(例如微处理器和/或专用集成电路(“asic”)) 执行。因此,应当注意,可以利用多个基于硬件和软件的设备以及多个不同的结构部件来实施实施例。例如,说明书中描述的“服务器”和“计算设备”可以包括一个或多个处理单元,一个或多个计算机可读介质模块,一个或多个输入/输出接口以及连接多个部件的各种连接(例如系统总线)。
23.图1至图5示出了包括壳体105的电动工具100。壳体105包括手柄部分110,电动机壳体部分112和输入控制设备115。电动机壳体部分112在其中容纳有电动机。手柄部分110远离电动机壳体部分112延伸。输入控制设备 115例如是被配置为控制电动工具100的操作模式的按钮或开关。输入控制设备115位于壳体105的顶部120上。更具体地,如图所示,输入控制设备115 位于电动机壳体部分112的顶部上、远离手柄部分110。例如,所示的输入控制设备115位于电动机壳体部分112的一(顶)侧,其与手柄部分110从其延伸的电动机壳体部分的一(底)侧相对。输入控制设备115位于手柄部分110,电动工具100的电动机,电动工具100的触发器125,电动工具100的输出主轴130,用于向电动工具100供电的电池组等的上方。通过将输入控制设备115 定位在壳体105的顶部120上并且远离或离开手柄部分110,可以使手柄部分 110更紧凑。例如,通过将输入控制设备115定位在壳体105的顶部120上,可以移除通常位于电动工具的触发器附近的物理杠杆,以使电动工具100的手柄部分110更紧凑。
24.当由电动工具100的用户致动时,输入控制设备115(也可以被称为模式选择器)产生模式信号。在一些实施例中,输入控制设备115包括机电按钮,该机电按钮响应于每次致动(例如,压下)而产生脉冲。该按钮可以被弹簧偏置,使得该致动在壳体105的方向上(克服弹簧的偏置力)短暂地按下按钮,然后当致动完成时,偏置弹簧将按钮返回到伸出位置。在一些实施例中,输入控制设备115包括触摸开关,诸如电容开关。所产生的模式信号被配置为控制电动工具100的操作模式。例如,输入控制设备115被配置为在电动机正向操作模式,电动机反向操作模式,以及锁定工具操作模式之间改变电动工具100 的操作模式。
25.图6示出了电动工具100的简化框图,该电动工具100包括控制器200 和电源202。电源202向电动工具100的各个部件提供直流电力,并且可以是电动工具电池组,其可再充电并且使用例如锂离子电池技术。在一些情况下,电源202可以从联接到标准壁装电源插座的工具插头接收交流电力(例如 120v/60hz),然后过滤,调节并整流所接收的电力以输出直流电力。
26.控制器200电性地和/或通信地连接到电动工具100的各种模块或部件。例如,所示的控制器200连接到一个或多个指示器205,电源输入模块210,电池组接口215,一个或多个传感器220,用户输入模块225,触发器开关230 (其连接至触发器235)和场效应晶体管(fet)开关桥240(例如,其包括一个或多个开关fet)。控制器200包括硬件和软件的组合,该硬件和软件的组合可操作以控制电动工具100的操作,激活一个或多个指示器205(例如,发光二极管(led)),监测电动工具100的操作等。
27.控制器200包括多个电气和电子部件,其向控制器200和/或电动工具 100内的部件和模块提供电力,操作控制和保护。例如,控制器200包括处理单元250(例如,微处理器,微控制器或其他合适的可编程设备),存储器255,输入单元260和输出单元265等。处理单元250包括控制单元270,算术逻辑单元(“alu”)275和多个寄存器280(在图6中示出为一组寄
存器)等,并且使用已知的计算机体系结构(例如,改良的哈佛体系结构,冯
·
诺依曼体系结构等)来实现。处理单元250,存储器255,输入单元260和输出单元265,以及连接到控制器200的各种模块通过一个或多个控制和/或数据总线(例如,公共总线285)连接。
28.存储器255是非暂时性计算机可读介质,其包括例如程序存储区域和数据存储区域。程序存储区域和数据存储区域可以包括不同类型的存储器的组合,例如只读存储器(“rom”),随机存取存储器(“ram”)(例如,动态ram[“dram”],同步dram[“sdram”]等),电可擦可编程只读存储器(“eeprom”),闪存,硬盘,sd卡或其他合适的磁,光,物理或电子存储设备。处理单元250连接到存储器255,并且执行能够存储在存储器255的ram中(例如,在执行期间),在存储器255的rom中(例如,在大体上永久的基础上),或在其他非暂时性计算机可读介质(例如另一存储器或磁盘)的软件指令。电动工具100的实施方式中包括的软件可以存储在控制器200的存储器255中。控制器200被配置为从存储器中检索并例如执行与本文所述的电动工具的控制有关的指令。
[0029]
指示器205包括例如一个或多个发光二极管(“led”)。传感器220包括例如一个或多个电流传感器,一个或多个速度传感器,一个或多个霍尔效应传感器,一个或多个温度传感器等。电池组接口215包括机械和电气部件的组合,其被配置为并可操作以用于使电动工具100与电源202连接(例如,机械地,电气地并且可通信地连接)。例如,由电池组(电源202的一个示例)向电动工具100提供的电力通过电池组接口215被提供给电力输入模块210。电力输入模块210包括有源部件和无源部件的组合,其在向控制器200提供电力之前调节或控制从电池组接收的电力。电池组接口215还向由开关fet进行切换的 fet开关桥240提供电力,以选择性地向电动机245提供电力。再次参考图1,电动机245容纳在电动机壳体部分112内,并且被配置成经由直接驱动联接器或传动装置(例如,包括行星齿轮)来驱动输出主轴130。返回参考图6,电池组接口215还包括例如通信线路290,其用于提供控制器200和电池组之间的通信线路或链路。
[0030]
在一些实施例中,该工具包括霍尔传感器246(例如,三个霍尔传感器),该霍尔传感器246安装在印刷电路板(未示出)上并在不同的径向位置(例如,彼此间隔开120度)轴向地位于电动机245附近。每当转子的磁体在霍尔传感器246中的一个的表面上旋转时,霍尔传感器246就输出电动机反馈信息,例如指示(例如,脉冲)。基于来自霍尔传感器246的电动机反馈信息,控制器 200可以确定转子的位置,速度和加速度。控制器200还从用户输入模块225 和触发器开关230接收用户控制。响应于电动机反馈信息和用户控制,控制器 200将控制信号传输到fet开关桥240以驱动电动机245。在一些实施例中,电动工具100可以是不包括的霍尔传感器246或其他用于检测转子的位置的位置传感器的无传感器电动工具。反而,可以基于电动机245的电感或在电动机 245中产生的反电动势来检测转子位置。尽管未示出,但是控制器200和电动工具100的其他部件电联接至电源202,使得电源202向其提供电力。
[0031]
在一些实施例中,fet开关桥240包括具有多个高压侧电力开关元件(例如,场效应晶体管(fet))和多个低压侧电力开关元件(例如,fet)的开关桥。如上所述,控制器200基于电动机反馈信息和用户控制来提供控制信号以控制高压侧fet和低压侧fet以驱动电动机。例如,响应于检测到触发器235 的拉动和来自用户输入模块225的输入,控制器200提供控制信号以选择性地启用和停用fet(例如,成对的顺序地),从而导致来自电源202的电力被
选择性地施加到电动机245的定子线圈,以引起转子的旋转。更具体地,为了驱动电动机245,控制器200在第一时间段内启用第一高压侧fet和第一低压侧 fet对(例如,通过在fet的栅极端子处提供电压)。响应于基于来自霍尔传感器246的脉冲确定电动机245的转子已经旋转,控制器200停用第一fet对,并启用第二高压侧fet和第二低压侧fet。响应于基于来自霍尔传感器246的脉冲确定电动机245的转子已经旋转,控制器200停用第二fet对,并启用第三高压侧fet和第三低压侧fet。响应于基于来自霍尔传感器246的进一步的脉冲确定电动机245的转子已经旋转,控制器200停用第三fet对并且返回以启用第一高压侧fet和第一低压侧fet。该周期性地启用成对的高压侧fet和低压侧fet的顺序重复以驱动电动机245。此外,在一些实施例中,控制信号包括具有与触发器235的触发器拉动量成比例设置的占空比的脉宽调制(pwm) 信号,从而控制电动机245的速度或扭矩。在一些实施例中,为了沿第一方向 (例如,正向)驱动电动机,该周期性地启用成对的高压侧fet和低压侧fet 的顺序以第一顺序进行(例如,对1,对2,对3,对1,对2等),并且为了沿第二方向(例如,反向)驱动电动机,该周期性地启用成对的高压侧fet和低压侧fet的顺序以第二顺序进行(例如,对3,对2,对1,对3,对2等)。
[0032]
用户输入模块225可操作地联接至控制器200,以例如选择用于电动工具100的正向操作模式,反向操作模式或电动工具锁定操作模式。用户输入模块225例如包括位于壳体105的顶部上的输入控制设备115。每次输入控制设备115由电动工具100的用户致动时,控制器200就从用户输入模块225接收模式信号。每次控制器200从用户输入模块225接收到该模式信号时,电动工具100的操作模式都被改变。在一些实施方式中,控制器200在正向操作模式,反向操作模式和电动工具锁定操作模式中的每一个之间顺序地切换。例如,电动工具100可包括第一操作模式,第二操作模式和第三操作模式。如果电动工具100当前正在第一操作模式下操作,则来自用户输入模块225的模式信号将使控制器200切换到第二操作模式。如果电动工具100当前正在第二操作模式下操作,则来自用户输入模块225的模式信号将使控制器200切换到第三操作模式。如果电动工具100当前正在第三操作模式下操作,则来自用户输入模块 225的模式信号将使控制器200切换到第一操作模式。
[0033]
在一些实施例中,第一操作模式是正向操作模式,其中控制器200响应于触发器235的按下和触发信号的产生而控制fet开关桥240以在第一(正向) 方向上驱动电动机245。在一些实施例中,第二操作模式是反向操作模式,其中控制器200响应于触发器235的按下控制fet开关电桥240以沿与第一(正向)方向相反的第二(反向)方向驱动电动机245。在一些实施例中,第三操作模式是锁定操作模式,其中即使在响应于触发器235被按下而产生触发信号时,控制器200也防止或抑制电动机245的驱动(例如,通过将控制信号发送到fet开关桥240或通过不将控制信号发送到fet开关桥240)。换句话说,在锁定操作模式下,控制器200忽略用户对触发器235的按下,并且不响应于用户按下触发器235来驱动电动机245。
[0034]
在一些实施例中,指示器205包括led,其提供对由输入控制设备115 选择的电动工具100的模式的指示。返回参考图2,指示器205的led可以与输入控制设备115上示出的每个符号(即,向前箭头符号205a,向后箭头符号205b和锁定符号205c)相关联。控制器200亮起与电动工具100的当前操作模式相关联的led(例如,当在正向操作模式下时,向前箭头205a亮起;当在反向操作模式下时,向后箭头205b亮起;并且当在锁定操作模式下时,锁定
符号205c亮起)。
[0035]
图7是根据一些实施例的控制电动工具的操作模式的方法300的流程图。参考上述电动工具100描述方法300。然而,在一些实施例中,可使用其他电动工具来实现该方法。
[0036]
在框310,在电动工具100的控制器200中接收来自输入控制设备115 的接收模式信号,该输入控制设备115位于电动工具100的壳体105的顶部 120上,该顶部120位于壳体105的手柄部分110上方。例如,每次用户致动输入控制设备115时,控制器200都接收模式信号。在一些实施例中,模式信号是脉冲信号。
[0037]
在框320,控制器200响应于模式信号而选择电动工具100的多个操作模式中的一个不同的操作模式。在一些实施例中,操作模式至少包括正向模式和反向模式。在一些实施例中,操作模式还包括锁定操作模式。换句话说,在框320,控制器200可以将工具的当前操作模式(从多个操作模式中选择)改变为另一操作模式(从多个操作模式中选择)。
[0038]
在框330,控制器200根据所选择的操作模式来操作电动机245。例如,在正向操作模式,响应于触发器235的按下和由触发器开关230生成的触发信号,控制器200控制fet开关桥240以正向驱动电动机245。在反向操作模式,响应于触发器235的按下和由触发器开关230生成的触发信号,控制器200控制fet开关桥240以沿与正向相反的反向驱动电动机245。在锁定操作模式,通过即使在响应于触发器235被按下而产生触发信号时也不向fet开关桥240 发送控制信号,控制器200防止或抑制电动机245的驱动。换句话说,在锁定操作模式下,控制器200忽略用户对触发器235的按下,并且不响应于用户按下触发器235来驱动电动机245。
[0039]
通过停留在框330以用于在当前操作模式下随后的触发器235的触发,或者通过响应于输入控制设备115的另一致动和模式信号的产生而循环回到框310,在电动工具以框330操作之后,电动工具100的操作可以根据图7的方法300继续。在一些实施例中,当在触发器235被致动的一段时间之前致动输入控制装置115时,框330被绕过。因此,至少在一些实施例中,在每次接收到模式信号时,控制器200可以在多个操作模式之间顺序地切换(即,循环),并且不需要在循环到下个操作模式之前首先根据选定的模式来操作电动机。在输入控制设备115的连续致动下,控制器200可以使操作模式从正向,到反向,到锁定,回到正向,到反向,到锁定循环,依此类推。在其他示例中,在循环时使用不同操作模式顺序(例如,正向,锁定,反向,正向,锁定,反向,依此类推)。
[0040]
因此,本文描述的实施例尤其提供了一种电动工具,该电动工具包括位于壳体的顶部上的用于改变电动工具的操作模式的输入控制设备。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。