1.本发明涉及具备由电动马达驱动液压泵的驱动系统的电动式液压工程机械。
背景技术:
2.例如专利文献1记载了一种电动式液压工程机械,其将驱动源从发动机变更为电动马达,具备由电动马达驱动液压泵的驱动系统。
3.现有技术文献
4.专利文献
5.专利文献1:wo2018/168887号公报
技术实现要素:
6.将驱动源从发动机变更为电动马达的专利文献1所记载的电动式液压工程机械具有如下优点:由于不排放废气,所以环境负荷低,并且与以往的以发动机为驱动源的液压挖掘机相比更安静。但是,例如在因行驶动作等而导致液压泵的排出压上升至溢流阀的设定压(溢流压)、液压泵的负载扭矩突然增大的情况下,为了使电动马达输出大小与液压泵的负载扭矩的增大相称的扭矩,向电动马达供给的电流骤增。在电力源是电池的情况下,若在电池的剩余量少的状态下使电流骤增,则会加重电池的劣化。另外,在电力源是外部电源的情况下,由于电压因电流的骤变而突然变动,所以存在无法在恰当的电压范围内使用设备、无法再使设备恰当工作的隐患。
7.本发明是鉴于上述课题而做出的,其目的在于,提供一种具备由电动马达驱动液压泵的驱动系统的电动式液压工程机械,在该电动式液压工程机械中,当执行机构的驱动开始时,能够根据电力源的状态抑制电动马达的消耗电力的增加,在恰当的状态下使用设备。
8.为了解决这种课题,本发明的电动式液压工程机械具备:液压泵;由从所述液压泵排出的液压油驱动的执行机构;指示所述执行机构的动作速度及方向的操作杆装置;获取所述操作杆装置的操作状态信息的操作状态检测装置;溢流阀,其连接于将所述液压泵和所述执行机构连接的油路,并在所述油路的压力达到预先设定的目标溢流压时将所述油路的液压油排出到油箱;和被从电力源供给电力并驱动所述液压泵的电动马达,在该电动式液压工程机械中,具备控制器,该控制器基于所述操作状态信息和所述电力源的状态量来使所述溢流阀的所述目标溢流压变化,所述控制器在所述操作杆装置未被操作且所述电力源的状态量为预先设定的阈值以上时,将第一溢流压设定为所述目标溢流压;并在所述操作杆装置未被操作且所述电力源的状态量小于所述阈值时,将比所述第一溢流压低的第二溢流压设定为所述目标溢流压。
9.这样,控制器在操作杆装置未被操作且电力源的状态量为预先设定的阈值以上时,将第一溢流压设定为目标溢流压;并在操作杆装置未被操作且电力源的状态量小于所述阈值时,将比第一溢流压低的第二溢流压设定为目标溢流压,由此,当对操作杆装置进行
操作而开始执行机构的驱动时,液压泵的排出压仅上升至比第一溢流压低的第二溢流压。由此,当执行机构的驱动开始时,能够根据电力源的状态来抑制电动马达的消耗电力的增加,在恰当的状态下使用设备。
10.发明效果
11.根据本发明,当执行机构的驱动开始时,能够根据电力源的状态抑制电动马达的消耗电力的增加,在恰当的状态下使用设备。
附图说明
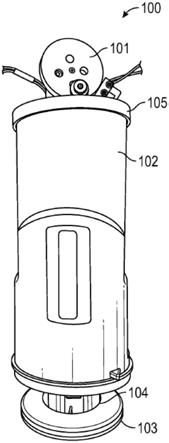
12.图1是表示本发明的一个实施方式中的电动式液压工程机械的外观的图。
13.图2是表示本发明的第一实施方式中的电动式液压挖掘机所具备的驱动系统的图。
14.图3是表示第一实施方式中的控制器的功能的框图。
15.图4是表示第一实施方式中的压力上限值运算部的功能的框图。
16.图5是表示操作状态判定部的运算流程的流程图。
17.图6是表示操作压与方向控制阀的入口节流开口面积之间的关系的图,是说明操作压的阈值的定义的图。
18.图7是表示图4所示的降低溢流压计算部的运算流程的图。
19.图8是表示图4所示的溢流压增加量计算部的运算流程的图。
20.图9是表示图4所示的目标溢流压计算部的运算流程的流程图。
21.图10是表示泵输出与逆变器输入电力之间的关系式的图。
22.图11是表示第一实施方式中的泵排出压及泵输出的演进例的图。
23.图12是表示根据蓄电量并利用图8所示的soc-溢流压增加量表而计算出的溢流压增加量不同的情况下的泵排出压和泵输出的演进例的图。
24.图13是表示第一实施方式的变形例1的驱动系统的图。
25.图14是表示第一实施方式的变形例2的驱动系统的图。
26.图15是表示第一实施方式的变形例3的驱动系统的图。
27.图16是表示第一实施方式的变形例4的与图11相同的泵排出压及泵输出的演进例的图。
28.图17是表示本发明的第二实施方式的驱动系统的图。
29.图18是表示第二实施方式中的控制器的功能的框图。
30.图19是表示第二实施方式中的压力上限值运算部的功能的框图。
31.图20是表示第二实施方式中的降低溢流压计算部的运算流程的图。
32.图21是表示第二实施方式中的溢流压增加量计算部的运算流程的图。
33.图22是表示第二实施方式的变形例的驱动系统的图。
34.图23是表示本发明的第三实施方式的驱动系统的图。
35.图24是表示第三实施方式中的控制器的功能的框图。
36.图25是表示第三实施方式中的压力上限值运算部的功能的框图。
37.图26是表示第三实施方式中的降低溢流压计算部的运算流程的图。
38.图27是表示第三实施方式中的溢流压增加量计算部的运算流程的图。
39.图28是表示本发明的第四实施方式的驱动系统的图。
40.图29是表示第四实施方式中的控制器的功能的框图。
41.图30是表示第四实施方式中的压力上限值运算部的功能的框图。
42.图31是表示第四实施方式中的目标溢流压计算部的运算流程的流程图。
43.图32是表示第四实施方式中的泵排出压及泵输出的演进例的图。
44.图33是表示本发明的第五实施方式中的控制器的功能的框图。
45.图34是表示第五实施方式中的压力上限值运算部的功能的框图。
46.图35是表示第五实施方式中的目标溢流压计算部的运算流程的流程图。
47.图36是表示第五实施方式中的泵排出压及泵输出的演进例的图。
具体实施方式
48.以下,根据附图来说明本发明的实施方式。
49.<第一实施方式>
50.<结构>
51.图1是表示本发明的一个实施方式中的电动式液压工程机械的外观的图。
52.在本实施方式中,电动式液压作业机械是电动式液压挖掘机,电动式液压挖掘机具备下部行驶体101、上部旋转体102和摆动式的前作业机104,前作业机104由动臂111、斗杆112和铲斗113构成。前作业机104的动臂111、斗杆112和铲斗113能够通过动臂液压缸111a、斗杆液压缸112a和铲斗液压缸113a的伸缩而在上下方向上转动。上部旋转体102与下部行驶体101通过旋转轮215而旋转自如地连接,上部旋转体102能够通过旋转马达102a的旋转而相对于下部行驶体101旋转。在上部旋转体102的前部安装有摆动柱103,前作业机104能够上下动作地安装于该摆动柱103。摆动柱103能够通过摆动液压缸103a的伸缩而相对于上部旋转体102在水平方向上转动,在下部行驶体101的中央车架安装有左右的行驶装置105a、105b和通过铲板液压缸106a的伸缩而进行上下动作的铲板106。左右的行驶装置105a、105b分别具备驱动轮210a、210b、导向轮211a、211b和履带212a、212b,通过利用左右的行驶马达101a、101b的旋转并经由驱动轮210a、210b驱动履带212a、212b而进行行驶。
53.在上部旋转体102设置有在旋转车架107上搭载电池62(参照图2)并兼作配重的电池搭载部109、和内部形成有驾驶室108的舱室110,在驾驶室108内设有:驾驶席122;动臂液压缸111a、斗杆液压缸112a、铲斗液压缸113a及旋转马达102a用的左右的操作杆装置124a、124b;摆动液压缸103a、左右的行驶马达101a、101b及铲板液压缸106a用的未图示的操作杆装置;和监视器80等。
54.在以下说明中,有时将上部旋转体102称为车身。
55.图2是表示本发明的第一实施方式中的电动式液压挖掘机所具备的驱动系统的图。
56.在图2中,驱动系统具备电动马达60、液压泵1、溢流阀3、油箱5、方向控制阀42、止回阀40、液压马达43和操作杆装置44。
57.液压泵1为固定容量型,由电动马达60驱动。液压泵1经由油路2与方向控制阀42连接。在油路2上且在方向控制阀42的上游连接有溢流油路4。在溢流油路4上安装有溢流阀3。溢流阀3的下游侧与油箱5连接。在油路2上且在与溢流油路4的连接点的下游且方向控制阀
42的上游连接有止回阀40。液压油能够从液压泵1朝向方向控制阀42的方向流过止回阀40,但无法向其反方向流动。
58.方向控制阀42与油路2连接,且连接于与液压马达43的左旋转侧室连接的左旋转油路43l、与液压马达43的右旋转侧室连接的右旋转油路43r、和与油箱5连接的油箱油路43t。
59.方向控制阀42由操作口42l的压力和操作口42r的压力驱动。在操作口42l、42r的压力都低的情况下,方向控制阀42处于图示的中立位置,油路2与油箱油路43t连接,其他油路被截断。在操作口42l的压力高的情况下,方向控制阀42被切换到图示上侧的位置,油路2与左旋转油路43l连接,且油箱油路43t与右旋转油路43r连接。在操作口42r的压力高的情况下,方向控制阀42被切换到图示下侧的位置,油路2与右旋转油路43r连接,且油箱油路43t与左旋转油路43l连接。
60.操作杆装置44具有操作杆44a和安装于操作杆44a的先导阀45,先导阀45经由先导油路28与方向控制阀42的操作口42l连接,并经由先导油路26与方向控制阀42的操作口42r连接,与操作杆44a的操作量相应的操作压从先导阀45被引导至方向控制阀42的操作口42r或操作口42l。
61.液压马达43代表图1所示的作为多个执行机构的动臂液压缸111a、斗杆液压缸112a、铲斗液压缸113a、旋转马达102a、摆动液压缸103a、左右的行驶马达101a、101b和铲板液压缸106a中的一个,例如是左右的行驶马达101a、101b中的一方。方向控制阀42及操作杆装置44也是同样的,方向控制阀42代表图1所示的多个执行机构用的多个方向控制阀中的一个,操作杆装置44代表图1所示的多个执行机构用的包括操作杆装置124a及124b的多个操作杆装置中的一个。
62.另外,液压马达43是由从液压泵1排出的液压油驱动的执行机构,操作杆装置44是指示液压马达43(执行机构)的动作速度及速度的操作杆装置。
63.驱动系统还具备控制器50、逆变器61、电池62、电池控制控制器63、压力传感器70和梭阀72。
64.电池62是储存电力的蓄电装置,是向电动马达60供给电力的电力源。从电池62输出的直流电流经由电线82输入至逆变器61。逆变器61将所输入的直流电流转换成交流电流,并输出转换后的交流电流以使电动马达60按照从控制器50发送的转速指令值旋转。所输出的交流电流经由电线81输入至电动马达60。电池62的输出控制和蓄电量的计算由电池控制控制器63进行。
65.梭阀72与先导油路26和先导油路28连接,并将各个油路26、28的压力(操作压)中的较大一方引导至作为操作状态检测装置的压力传感器70。压力传感器70将油路26、28的压力(操作压)中的较大一方检测为操作杆装置44的操作状态信息,并将压力信号发送至控制器50。压力传感器70是获取操作杆装置44的操作状态信息的操作状态检测装置。
66.控制器50与压力传感器70电连接,并从压力传感器70接收压力信号。另外,控制器50也与电池控制控制器63电连接,并通过通信来收发信息。从电池控制控制器63将电池62的蓄电量发送至控制器50。另外,控制器50也与逆变器61电连接,并通过通信来收发信息。从控制器50将电动马达60的转速指令值发送至逆变器61。
67.溢流阀3是可变溢流阀,具备:设定通常的溢流压(第一溢流压)的弹簧3a;设于与
弹簧3a相对抗的一侧并被引导油路2的压力(液压泵1的排出压)的受压部3b;和设于与受压部3b相同的一侧并使弹簧3a所设定的通常的溢流压降低的螺线管3c。
68.溢流阀3是与作为连接液压泵1和液压马达43(执行机构)的油路之一的油路2连接、并在油路2的压力(液压泵1的排出压)达到预先设定的目标溢流压时将油路2的液压油排出到油箱5的溢流阀。
69.控制器50也与溢流阀3的螺线管3c电连接,能够使通常的溢流压降低。此外,也可以相对于控制器50收发上述以外的信息和指令值。另外,针对逆变器61的转速指令值在本实施方式中是恒定值。
70.控制器50基于来自压力传感器70的压力信号(操作状态信息)来判定操作杆装置44是否被操作,并基于其判定结果而根据电池62的蓄电量(电力源的状态量)使溢流阀3的目标溢流压变化。
71.以下,对控制器50的上述功能的详情进行说明。
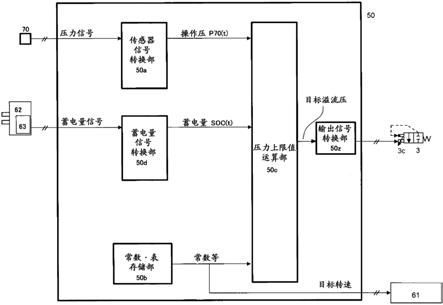
72.图3是表示第一实施方式中的控制器50的功能的框图。
73.控制器50具备传感器信号转换部50a、蓄电量信号转换部50d、常数
·
表存储部50b、压力上限值运算部50c和输出信号转换部50z。
74.传感器信号转换部50a接收从压力传感器70发送的压力信号(由操作杆装置44生成的操作压的信号),基于该压力信号计算操作压p70(t)并将其发送至压力上限值运算部50c。
75.蓄电量信号转换部50d基于从电池控制控制器63发送的蓄电量信号来计算蓄电量soc(t),并将其发送至压力上限值运算部50c。
76.常数
·
表存储部50b存储有计算所需的常数和表,并将它们发送至压力上限值运算部50c。此外,常数中包括电动马达60的目标转速,该信息被发送至逆变器61。
77.压力上限值运算部50c接收从传感器信号转换部50a发送的操作压p70(t)、从蓄电量信号转换部50d发送的蓄电量soc(t)、从常数
·
表存储部50b发送的常数和表信息,并运算目标溢流压。而且,压力上限值运算部50c向输出信号转换部50z输出目标溢流压。
78.输出信号转换部50z计算如溢流阀3的溢流压成为目标溢流压那样的输出,并将其输出至溢流阀3的螺线管3c。
79.图4是表示第一实施方式中的压力上限值运算部50c的功能的框图。需要说明的是,控制器50的采样时间(运算周期)为δt,针对每个采样时间δt重复执行压力上限值(目标溢流压)的运算。
80.压力上限值运算部50c具有操作状态判定部50c-1、降低溢流压计算部50c-2、溢流压增加量计算部50c-3、目标溢流压计算部50c-4和延迟要素50c-5。
81.操作状态判定部50c-1根据操作压p70(t)判定操作杆44a是否被操作,并输出操作标志f70(t)。若判定为被操作则将操作标志f70(t)设定为真(有效),若判定为无操作则将操作标志f70(t)设定为伪(无效)。该操作标志f70(t)的信息被发送至目标溢流压计算部50c-4。
82.降低溢流压计算部50c-2基于后述的计算方法来根据蓄电量soc(t)计算降低溢流压pr(t)。该降低溢流压pr(t)的信息被发送至目标溢流压计算部50c-4。
83.溢流压增加量计算部50c-3基于后述的计算方法来根据蓄电量soc(t)计算溢流压
增加量δp(t)。该溢流压增加量δp(t)的信息被发送至目标溢流压计算部50c-4。
84.目标溢流压计算部50c-4基于操作标志f70(t)、降低溢流压pr(t)、溢流压增加量δp(t)、和目标溢流压p3(t)的当前值即一个采样时间δt之前的目标溢流压p3(t-δt)来计算目标溢流压p3(t),并将其输出。
85.图5是表示操作状态判定部50c-1的运算流程的流程图,在控制器50工作的期间内,针对每个采样时间δt重复执行该运算流程。
86.在步骤s101中,操作状态判定部50c-1的运算开始。
87.在步骤s102中,操作状态判定部50c-1判定操作压的值即操作压p70(t)是否大于阈值pith。在操作压p70(t)大于阈值pith的情况下判定为是,并进入步骤s103的处理;在操作压p70(t)为阈值pith以下的情况下判定为否,并进入步骤s104的处理。
88.在步骤s103中,操作状态判定部50c-1判定为操作杆44a被操作而将操作标志f70(t)设定为真(有效),并向目标溢流压计算部50c-4发送该操作标志f70(t)的信息。
89.在步骤s104中,操作状态判定部50c-1判定为操作杆44a未被操作而将操作标志f70(t)设定为伪(无效)。而且,向目标溢流压计算部50c-4发送该信息。
90.使用图6来说明操作压p70(t)的阈值pith的定义。
91.图6是表示操作压p70(t)与方向控制阀42的入口节流开口面积之间的关系的图。
92.在图6中,pith是当操作杆44a被操作且操作压p70(t)上升时方向控制阀42的入口节流开口开始打开的压力值。即,由于直到操作压p70(t)变成pith的值为止方向控制阀42的入口节流开口都不打开,所以液压马达43不工作。当操作压p70(t)超过pith时,方向控制阀42的入口节流开口打开,液压马达43工作。操作状态判定部50c-1将该入口节流开口开始打开的操作压的压力值pith设定为阈值。
93.图7是表示图4所示的降低溢流压计算部50c-2的运算流程的图,在控制器50工作的期间内,针对每个采样时间δt重复执行该运算流程。
94.在图7中,蓄电量soc(t)输入至soc-降低溢流压表50c-2t,计算出与此时的蓄电量soc(t)对应的降低溢流压pr(t)。在soc-降低溢流压表50c-2t中,如图7的下侧所示,以如下方式设定蓄电量soc(t)与降低溢流压pr(t)之间的关系:当蓄电量soc(t)为s1以上时,降低溢流压pr(t)是通常时的溢流压pn;当蓄电量soc(t)从s1减少至s2时,降低溢流压pr(t)从通常时的溢流压pn下降至最小溢流压prmin;当蓄电量soc(t)减少至s2以下时,降低溢流压pr(t)保持为最小溢流压prmin。
95.在此,s1是蓄电量soc(t)的预先设定的阈值,用于在作为电力源的电池62的蓄电量soc(t)减少时判定是否需要使由溢流阀3的弹簧3a设定的通常的溢流压下降以保护电池62不劣化。
96.降低溢流压计算部50c-2使用这种soc-降低溢流压表50c-2t来计算与蓄电量soc(t)相应的降低溢流压pr(t),并将计算出的降低溢流压pr(t)发送至目标溢流压计算部50c-4。
97.图8是表示图4所示的溢流压增加量计算部50c-3的运算流程的图,在控制器50工作的期间内,针对每个采样时间δt重复执行该运算流程。
98.在图8中,蓄电量soc(t)输入至soc-溢流压增加量表50c-3t,计算与此时的蓄电量soc(t)对应的溢流压增加量δp(t)。在soc-溢流压增加量表50c-3t中,如图8的下侧所示,
以如下方式设定蓄电量soc(t)与溢流压增加量δp(t)之间的关系:当蓄电量soc(t)为s3以上时,溢流压增加量δp(t)是最大的δpmax;当蓄电量soc(t)从s3减少至s4时,溢流压增加量δp(t)从最大溢流压增加量δpmax下降至最小溢流压增加量δpmin;当蓄电量soc(t)减少至s4以下时,溢流压增加量δp(t)保持为最小溢流压增加量δpmin。
99.溢流压增加量计算部50c-3使用这种soc-溢流压增加量表50c-3t来计算与蓄电量soc(t)相应的溢流压增加量δp(t),并将计算出的溢流压增加量δp(t)发送至目标溢流压计算部50c-4。
100.图9是表示图4所示的目标溢流压计算部50c-4的运算流程的流程图,在控制器50工作的期间内,针对每个采样时间δt重复执行该运算流程。
101.在步骤s401中,目标溢流压计算部50c-4的运算开始。
102.在步骤s402中,目标溢流压计算部50c-4判定操作标志f70(t)是否为真(有效)。在操作标志f70(t)为真的情况下判定为是,并进入步骤s403的处理。在操作标志f70(t)为伪(无效)的情况下判定为否,并进入步骤s406的处理。
103.在步骤s403中,目标溢流压计算部50c-4判定一个采样时间δt之前的目标溢流压p3(t-δt)与溢流压增加量δp(t)之和是否大于通常时的溢流压pn。一个采样时间δt之前的目标溢流压p3(t-δt)是目标溢流压的当前值。在p3(t-δt)与δp(t)之和大于通常时的溢流压pn的情况下,在步骤s403中判定为是,并进入步骤s404的处理。在p3(t-δt)与δp(t)之和为通常时的溢流压pn以下的情况下,在步骤s403中判定为否,并进入步骤s405的处理。
104.在步骤s404中,目标溢流压计算部50c-4将目标溢流压p3(t)设定为通常时的溢流压pn。而且,向输出信号转换部50z输出目标溢流压p3(t)。
105.在步骤s405中,目标溢流压计算部50c-4将目标溢流压p3(t)设定为一个采样时间之前的目标溢流压p3(t-δt)与溢流压增加量δp(t)之和。而且,向输出信号转换部50z输出目标溢流压p3(t)。
106.在步骤s406中,目标溢流压计算部50c-4将目标溢流压p3(t)设定为降低溢流压pr(t)。而且,向输出信号转换部50z输出目标溢流压p3(t)。
107.这样,在本实施方式中,控制器50在操作杆装置44未被操作且电池62的蓄电量soc(t)(电力源的状态量)为阈值s1以上时,将通常的溢流压pn(第一溢流压)设定为溢流阀3的目标溢流压;在操作杆装置44未被操作且电池62的蓄电量soc(t)(电力源的状态量)小于阈值s1时,将比通常的溢流压pn(第一溢流压)低的降低溢流压pr(t)(第二溢流压)设定为目标溢流压。
108.另外,控制器50在当目标溢流压是比通常的溢流压pn(第一溢流压)低的降低溢流压pr(t)(第二溢流压)时对操作杆装置44进行操作而开始液压马达43(执行机构)的驱动的情况下,使目标溢流压以规定的比例增加,以将目标溢流压设为通常的溢流压pn(第一溢流压)。
109.另外,控制器50在当目标溢流压是比通常的溢流压pn(第一溢流压)低的降低溢流压pr(t)(第二溢流压)时对操作杆装置44进行操作而开始液压马达43(执行机构)的驱动的情况下,按每规定时间(采样时间δt)计算随着电池62的蓄电量soc(t)(电力源的状态量)变小而变小的溢流压增加量δp(t),并使目标溢流压的当前值与溢流压增加量δp(t)相
加,使目标溢流压以规定的比例增加,将目标溢流压设为通常的溢流压pn(第一溢流压)。
110.接着,在说明第一实施方式中的效果之前,对液压泵1的输出功率(泵输出)与逆变器61的输入电力(逆变器输入电力)之间的关系进行说明。
111.图10是表示泵输出与逆变器输入电力之间的关系式的图。
112.图10的式(1)的左边中的μ以外的部分va是被输入至逆变器61而消耗的电力的计算式。朝向逆变器61的输入端子侧的电压v与朝向逆变器61的输入端子侧的直流电流a的乘积是逆变器61消耗的电力。
113.图10的式(1)的左边的μ是从输入至逆变器61到从液压泵1输出为止的能量的转换效率。通过将μ与电力va相乘来求出液压泵1的输出功率。
114.图10的式(1)的右边是液压泵1的输出功率的计算式。通过将液压泵1的排出压(泵排出压)p与液压泵1的排出流量(泵流量)q相乘来求出液压泵1的输出功率。
115.在此,在负载作用于液压泵1的情况下,电动马达60从液压泵1接收负载扭矩而转速变动,但在本实施方式中其变动幅度与目标转速相比足够小。在该情况下,泵流量q几乎不变动。另外,朝向逆变器61的输入端子侧的电压v也几乎不变动。另外,能量的转换效率μ并不明显变化。
116.根据以上的前提和图10的式(1),朝向逆变器61的输入端子侧的直流电流a与泵排出压p成比例。因此可知:若抑制泵排出压p的变动,则能够抑制朝向逆变器61的输入端子侧的直流电流a的变动。
117.接着,使用泵排出压及泵输出的演进例来说明第一实施方式的效果。
118.图11是表示第一实施方式中的泵排出压及泵输出的演进例的图。图11的最上方的曲线图表示操作压p70(t)的时间变化,中央的曲线图表示泵排出压的时间变化,最下方的曲线图表示泵输出(液压泵1的输出功率)。
119.图11所示的演进例是电池62的蓄电量soc(t)在图7及图8所示的表中处于比阈值s1小的sa的情况。此时,目标溢流压p3(t)与通常的溢流压pn相比降低,利用图7所示的soc-降低溢流压表50c-2t计算出的降低溢流压pr(t)是最小溢流压prmin,利用图8所示的soc-溢流压增加量表50c-3t计算出的溢流压增加量δp(t)是最大溢流压增加量δpmax与最小溢流压增加量δpmin之间的值δpa。另外,在操作杆44a未被操作的状态下,目标溢流压计算部50c-4在图9的步骤s406中计算出降低溢流压pr(t)=最小溢流压prmin的目标溢流压p3(t)。
120.在图11中,在时刻t0,操作杆44a未被操作,操作压p70(t)低于阈值pith。另外,在图9的步骤s406中计算出降低溢流压pr(t)=最小溢流压prmin的目标溢流压p3(t),目标溢流压p3(t)被设定为最小溢流压prmin。
121.之后对操作杆44a进行操作,在时刻t1,操作压p70(t)达到阈值pith。在该情况下,由于直到时刻t1为止操作压p70(t)都低于阈值pith,所以在此期间将目标溢流压p3(t)保持设定为最小溢流压prmin。
122.在时刻t1之后,操作压p70(t)超过阈值pith。此时,由于方向控制阀42的入口节流开口打开,所以泵排出压根据液压马达43的负载的大小而开始上升。另外,由于在图9的步骤s402中判定为是、并在步骤s403中判定为否,所以目标溢流压p3(t)被设定为一个采样时间之前的目标溢流压p3(t-δt)与δp(t)(=δpa)之和,目标溢流压p3(t)从最小溢流压
prmin以δpa/δt的斜率(变化率)增加。步骤s402和s403的计算在操作压p70(t)超过阈值pith的期间内重复进行,直到在时刻t4达到通常时的溢流压pn为止。之后,通过步骤s404的处理将目标溢流压p3(t)设定为通常的溢流压pn。
123.在时刻t2,根据液压马达43的负载的大小而上升的泵排出压与该时间点的目标溢流压p3(t2)一致。此时,在未进行本发明的控制的情况下如虚线所示泵排出压大幅变动(上升),相对于此,在进行本发明的控制的情况下,由于溢流阀3在该时间点打开以向油箱排出液压油、且泵排出压以不超过目标溢流压p3(t)的方式上升,所以如实线所示能够抑制泵排出压的骤变(上升)。
124.在时刻t2至时刻t3之间液压马达43的负载开始减少,在时刻t3,泵排出压与目标溢流压p3(t3)一致。自此以后的泵排出压由于低于目标溢流压p3(t),所以不受目标溢流压p3(t)限制地变化。
125.如上所述,即使是在刚刚开始操作之后泵排出压即将急剧上升的情况下,由于通过本发明的控制而降低了目标溢流压p3(t),所以也能够抑制泵排出压的变动幅度。其结果是,如图11的最下段所示也能够抑制泵输出,也能够抑制逆变器61消耗的直流电流的变动。另外,由于在开始操作之后溢流压以规定的时间比例增加,所以能够最终获得液压挖掘机动作所需的压力。
126.接着,对基于所设定的溢流压增加量根据蓄电量soc(t)可变而得到的效果进行说明。
127.图12是表示根据蓄电量soc(t)并利用图8所示的soc-溢流压增加量表50c-3t计算出的溢流压增加量δp(t)不同的情况下的泵排出压和泵输出的演进例的图。需要说明的是,利用图7所示的soc-降低溢流压表50c-2t计算出的降低溢流压pr(t)是与图11的演进例相同的最小溢流压prmin,未进行本发明的控制的情况下的泵排出压的时间变化也与图11的演进例相同。
128.在图8中,当蓄电量soc(t)变少时,溢流压增加量δp(t)变小,例如在蓄电量soc(t)从sa下降至sb的情况下,溢流压增加量δp(t)从δpa变化至最小溢流压增加量δpmin。在图12中,“蓄电量:高”表示图11的演进例的情况(蓄电量soc(t)为sa且溢流压增加量δp(t)为δpa的情况),“蓄电量:低”表示蓄电量soc(t)为sb且溢流压增加量δp(t)为δpmin的情况。在“蓄电量:低”的情况下,由于溢流压增加量δp(t)为δpmin且小于δpa,所以目标溢流压p3(t)达到通常时的溢流压pn的时刻成为比“蓄电量:高”的情况下的时刻t4晚的时刻t4’。由此,对于相同时刻下的目标溢流压p3(t),蓄电量soc(t)较少时的一方变低。其结果是,能够进一步抑制因泵排出压的变动(上升)而导致的泵输出的变动(增加)、进而进一步抑制电流的变动(增加)。
129.<效果>
130.如上所述,在本实施方式中,当操作杆装置44未被操作且电池62的蓄电量soc(t)小于阈值s1时,将比通常的溢流压pn低的溢流压设定为目标溢流压p3(t),因此在刚刚开始操作杆装置44的操作之后液压泵1的排出压即将急剧上升的情况下,能够将液压泵1的排出压的上升抑制为比通常的溢流压pn低的溢流压,能够抑制液压泵1的负载扭矩的增大。其结果是,电动马达60的消耗电力的增加被抑制,因此能够在恰当的状态下使用电池62(设备),能够防止处于电池62的蓄电量soc(t)低的状态时的电池62劣化。
131.另外,在开始操作杆装置44的操作之后,在操作杆装置44的操作持续的期间,直到目标溢流压p3(t)达到通常的溢流压pn为止目标溢流压p3(t)都以规定的比例(δp/δt)增加,因此能够最终获得液压挖掘机动作所需的液压泵1的排出压。
132.另外,在本实施方式中,当对操作杆装置44进行操作而开始液压马达43(执行机构)的驱动、且此时的目标溢流压是比通常的溢流压pn(第一溢流压)低的降低溢流压pr(t)(第二溢流压)时,按每采样时间δt计算随着电池62的蓄电量soc(t)变小而变小的溢流压增加量δp(t),并将目标溢流压p3(t)的当前值与溢流压增加量δp(t)相加,由此,使目标溢流压p3(t)以规定的比例(δp/δt)增加。因此,在电池62的蓄电量soc(t)低的情况下,目标溢流压p3(t)达到通常时的溢流压pn的时刻成为比电池62的蓄电量soc(t)高的情况下的时刻晚的时刻t4’,对于相同时刻下的目标溢流压p3(t),蓄电量soc(t)较少时的一方变低。其结果是,能够根据蓄电量soc(t)的减少程度来抑制因泵排出压的上升而导致的泵输出的增加、进而抑制电动马达60的消耗电力的增加,在恰当的状态下使用电池62(设备),能够更有效地防止电池62劣化。
133.此外,在本实施方式中,虽然设有溢流压增加量计算部50c-3、能够使液压泵1的排出压上升至通常的溢流压pn,但也可以省略溢流压增加量计算部50c-3并使目标溢流压p3(t)保持为比通常的溢流压pn低的溢流压。在该情况下,虽然液压泵1的输出稍微下降,但能够获得防止电池62劣化的效果。
134.另外,在本实施方式中,虽然设有溢流压增加量计算部50c-3、并根据电池62的蓄电量soc(t)使溢流压增加量δp(t)可变,但也可以不设置溢流压增加量计算部50c-3并将溢流压增加量δp(t)设为恒定值。由此,在操作杆装置44的操作持续的期间内,目标溢流压p3(t)也会增加至达到通常的溢流压pn为止,能够最终获得液压挖掘机动作所需的液压泵1的排出压。
135.<第一实施方式的变形例>
136.<变形例1>
137.在第一实施方式中,液压泵1为固定容量型,但液压泵也可以是可变容量型。图13是表示这种驱动系统的图。在图13中,液压泵1a为可变容量型,具备调节器30。另外,调节器30输入液压泵1a的排出压,以使液压泵1a的吸收扭矩不超过规定值的方式对液压泵1a的倾转角(容量)进行控制,并对液压泵1a的排出流量w进行控制,由此进行马力控制。即使在将本发明应用于进行这种马力控制的驱动系统的情况下,也能获得与第一实施方式相同的效果。
138.<变形例2>
139.变形例1向调节器30直接输入液压泵1a的排出压,但也可以通过电检测液压泵1a的排出压并基于其检测信号驱动调节器来进行马力控制。图14是表示这种驱动系统的图。在图14中,驱动系统具备电检测液压泵1a的排出压的压力传感器51,压力传感器51的检测信号(电信号)被发送至控制器50。控制器50基于该电信号生成马力控制的控制信号,并将其发送至调节器30a。调节器30a接收该控制信号,并以使液压泵1a的吸收扭矩不超过规定值的方式对液压泵1a的排出流量进行控制。即使在将本发明应用于进行这种控制的驱动系统的情况下,也能获得与第一实施方式相同的效果。
140.<变形例3>
141.本发明的驱动系统也可以构成为向调节器直接输入液压泵1a的排出压、且电检测液压泵1a的排出压、并将控制信号发送至调节器。图15是表示这种驱动系统的图。在图15中,调节器30b输入液压泵1a的排出压,进行液压泵1a的马力控制。另外,驱动系统具备电检测液压泵1a的排出压的压力传感器51,压力传感器51的检测信号(电信号)被发送至控制器50。控制器50基于该电信号生成马力控制的修正信号,并将其发送至调节器30b。马力控制的修正信号例如能够设为根据驱动系统的输出模式来修正马力控制的最大马力的信号。即,驱动系统构成为例如能够将动力源(电动马达60)的输出控制模式切换成通常模式、动力模式、经济模式,通过马力控制的修正信号配合其输出控制模式来修正马力控制开始压,从而修正马力控制的最大马力。即使在将本发明应用于进行这种马力控制的驱动系统的情况下,也能获得与第一实施方式相同的效果。
142.<变形例4>
143.在第一实施方式中,在图9的步骤s405中,将一秒钟之前的目标溢流压p3(t-δt)与恒定的溢流压增加量δp(t)相加而设定目标溢流压p3(t)。但是,溢流压增加量δp(t)也可以是随时间增加的可变值。图16是表示使用这种溢流压增加量δp(t)的情况下的与图11相同的泵排出压及泵输出的演进例的图。如图16所示,通过将溢流压增加量δp(t)设为随时间增加的可变值,目标溢流压p3(t)的增加量随时间增加。由此,在操作杆14a被操作、且操作压p70(t)超过阈值pith的时刻t1之后不久,能够进一步抑制泵排出压的上升以防止电池62的劣化,且之后能够使目标溢流压p3(t)迅速增加、无时间延迟地确保所需的泵输出。
144.<第二实施方式>
145.使用图17至图21对本发明的第二实施方式进行说明。此外,关于与第一实施方式相同的部分省略说明。
146.图17是表示第二实施方式的驱动系统的图。在图17中,第二实施方式的驱动系统与第一实施方式的不同点是:作为电力源,代替电池62及电池控制控制器63而具备作为外部电力转换装置的ac/dc转换器64,ac/dc转换器64的输出侧端子经由电线82与逆变器61的输入侧端子连接。该ac/dc转换器64能够与设置在车身外部的外部电源65连接,将从外部电源65供给的交流电流转换成直流电流,并将其经由电线82输出至逆变器61。另外,ac/dc转换器64也与控制器50c电连接,并通过通信来收发信息。从ac/dc转换器64将能够输出至逆变器61的可供给电力量发送至控制器50c。此外,也可以在ac/dc转换器64与控制器50c之间收发上述以外的信息。
147.图18是表示第二实施方式中的控制器50c的功能的框图。
148.在图18中,第二实施方式中的控制器50c的功能与第一实施方式的不同点是:代替蓄电量信号转换部50d而具备可供给电力量信号转换部50dc,在可供给电力量信号转换部50dc中,基于从ac/dc转换器64发送来的可供给电力量信号来计算可供给电力量wo(t);以及,代替压力上限值运算部50c而具备压力上限值运算部50cc,在压力上限值运算部50cc中,接收从可供给电力量信号转换部50dc发送的可供给电力量wo(t)来运算目标溢流压。
149.图19是表示第二实施方式中的压力上限值运算部50cc的功能的框图。
150.在图19中,第二实施方式中的压力上限值运算部50cc的功能与第一实施方式的不同点是:代替降低溢流压计算部50c-2而具备降低溢流压计算部50c-2c,在降低溢流压计算部50c-2c中,根据可供给电力量wo(t)来计算降低溢流压pr(t);以及,代替溢流压增加量计
算部50c-3而具备溢流压增加量计算部50c-3c,在溢流压增加量计算部50c-3c中,根据可供给电力量wo(t)来计算溢流压增加量δp(t)。
151.图20是表示第二实施方式中的降低溢流压计算部50c-2c的运算流程的图。
152.在图20中,第二实施方式中的降低溢流压计算部50c-2c的运算流程与第一实施方式的不同点是:代替将蓄电量soc(t)输入至soc-降低溢流压表50c-2t而将可供给电力量wo(t)输入至可供给电力量-降低溢流压表50c-2ct。在可供给电力量-降低溢流压表50c-2ct中,如图20的下侧所示,以如下方式设定可供给电力量wo(t)与降低溢流压pr(t)之间的关系:当可供给电力量wo(t)为w1以上时,降低溢流压pr(t)是通常时的溢流压pn;当可供给电力量wo(t)从w1减少至w2时,降低溢流压pr(t)从通常时的溢流压pn下降至最小溢流压prmin;当可供给电力量wo(t)减少至w2以下时,降低溢流压pr(t)保持为最小溢流压prmin。
153.在此,w1是可供给电力量wo(t)的预先设定的阈值,与前述的第一实施方式中的s1同样地,用于在作为电力源的ac/dc转换器64(外部电力转换装置)的可供给电力量wo(t)减少时,判定是否需要使由溢流阀3的弹簧3a设定的通常的溢流压下降以保护ac/dc转换器64能够恰当工作。
154.降低溢流压计算部50c-2c使用这种可供给电力量-降低溢流压表50c-2ct来计算与可供给电力量wo(t)相应的降低溢流压pr(t),并将计算出的降低溢流压pr(t)发送至目标溢流压计算部50c-4。
155.图21是表示第二实施方式中的溢流压增加量计算部50c-3c的运算流程的图。
156.在图21中,第二实施方式中的溢流压增加量计算部50c-3c的运算流程与第一实施方式的不同点是:代替将蓄电量soc(t)输入至soc-溢流压增加量表而将可供给电力量wo(t)输入至可供给电力量-溢流压增加量表50c-3ct。
157.在可供给电力量-溢流压增加量表50c-3ct中,如图21的下侧所示,以如下方式设定可供给电力量wo(t)与溢流压增加量δp(t)之间的关系:当可供给电力量wo(t)为w3以上时,溢流压增加量δp(t)是最大的δpmax;当可供给电力量wo(t)从w3减少至w4时,溢流压增加量δp(t)从最大溢流压增加量δpmax下降至最小溢流压增加量δpmin;当可供给电力量wo(t)减少至w4以下时,溢流压增加量δp(t)保持为最小溢流压增加量δpmin。
158.溢流压增加量计算部50c-3c使用这种可供给电力量-溢流压增加量表50c-3ct来计算与可供给电力量wo(t)相应的溢流压增加量δp(t),并将计算出的溢流压增加量δp(t)发送至目标溢流压计算部50c-4。
159.在目标溢流压计算部50c-4中,与第一实施方式的目标溢流压计算部50c-4同样地,基于操作标志f70(t)、降低溢流压pr(t)、溢流压增加量δp(t)、和目标溢流压p3(t)的当前值即一个采样时间δt之前的目标溢流压p3(t-δt)来计算目标溢流压p3(t),并将其输出。
160.<效果>
161.在如上所述构成的第二实施方式中,电力源是作为外部电力转换装置的ac/dc转换器64,使用设置在车身外部的外部电源65来驱动电动马达60,在这种电动式液压工程机械中,当在刚刚开始操作杆装置44的操作之后液压泵1的排出压即将急剧上升的情况下,能够将液压泵1的排出压的上升抑制为比通常的溢流压pn低的溢流压,能够抑制液压泵1的负载扭矩的增大,抑制电动马达60的消耗电力的过度增大。由此,能够在恰当的电压范围内
(恰当的状态下)使用ac/dc转换器64,能够使ac/dc转换器64(设备)恰当工作。
162.<第二实施方式的变形例>
163.图22是表示第二实施方式的变形例的驱动系统的图。
164.在第二实施方式中,利用搭载于车身的ac/dc转换器将来自位于车身外部的外部电源65的交流电流转换成直流,但如图22所示,也可以使用位于车身外部且输出直流电流的外部电池66作为外部电力供给装置,并将外部电池66经由电线82与逆变器61连接,控制器50c与外部电池66通信以接收外部电池66的可供给电力量的信息。由此,能够在外部电池66的蓄电量soc(t)低时在恰当的电压范围内(恰当的状态下)使用逆变器61,能够使逆变器61(设备)恰当工作。另外,能够防止外部电池66劣化并确保外部电池66的可靠性。
165.<第三实施方式>
166.使用图23至图27对本发明的第三实施方式进行说明。此外,关于与第一实施方式及第二实施方式相同的部分省略说明。
167.图23是表示第三实施方式的驱动系统的图。在图23中,第三实施方式由第一实施方式与第二实施方式组合构成,电池62和ac/dc转换器64相对于逆变器61以电并联的方式经由电线82而连接。在电池62搭载有电池控制控制器63。ac/dc转换器64将从车身外部的外部电源65供给的交流电流转换成直流电流,并将其经由电线82输出至逆变器61。逆变器61及ac/dc转换器64也与控制器50d电连接,并通过通信来收发信息。
168.图24是表示第三实施方式中的控制器50d的功能的框图。
169.在图24中,第三实施方式中的控制器50d的功能与第一实施方式的不同点是:代替蓄电量信号转换部50d而具备蓄电量/可供给电力量信号转换部50dd,在蓄电量/可供给电力量信号转换部50dd中,基于从电池控制控制器63发送来的蓄电量信号来计算蓄电量,同时基于从ac/dc转换器64发送来的可供给电力量信号来计算可供给电力量wo(t);以及,代替压力上限值运算部50c而具备压力上限值运算部50cd,在压力上限值运算部50cd中,还进一步接收从蓄电量/可供给电力量信号转换部50dd发送的可供给电力量wo(t)来运算目标溢流压。
170.图25是表示第三实施方式中的压力上限值运算部50cd的功能的框图。
171.在图25中,第三实施方式中的压力上限值运算部50cd与第一实施方式的不同点是:代替降低溢流压计算部50c-2而具备降低溢流压计算部50c-2d,在降低溢流压计算部50c-2d中,根据蓄电量soc(t)和可供给电力量wo(t)来计算降低溢流压pr(t);以及,代替溢流压增加量计算部50c-3而具备溢流压增加量计算部50c-3d,在溢流压增加量计算部50c-3d中,根据蓄电量soc(t)和可供给电力量wo(t)来计算溢流压增加量δp(t)。
172.图26是表示第三实施方式中的降低溢流压计算部50c-2d的运算流程的图。
173.在图26中,第三实施方式中的降低溢流压计算部50c-2d与第一实施方式的不同点是:将蓄电量soc(t)输入至soc-降低溢流压表50c-2t,并且将可供给电力量wo(t)输入至可供给电力量-降低溢流压表50c-2ct,将来自两个表50c-2t、50c-2ct的输出值中较大一方作为降低溢流压pr(t)输出。由此,例如在可供给电力量wo(t)小但蓄电量soc(t)大的情况下,能够将降低溢流压pr(t)设定为通常时的溢流压pn,不使溢流压降低。
174.图27是表示第三实施方式中的溢流压增加量计算部50c-3d的运算流程的图。
175.在图27中,第三实施方式中的溢流压增加量计算部50c-3d与第一实施方式的不同
点是:将蓄电量soc(t)输入至soc-溢流压增加量表50c-3t,并且将可供给电力量wo(t)输入至可供给电力量-溢流压增加量表50c-3ct,将来自两个表50c-3t、50c-3ct的输出值中较大一方作为溢流压增加量δp(t)输出。由此,例如在可供给电力量wo(t)小但蓄电量soc(t)大的情况下,能够较大地设定溢流压的增加量。
176.根据第三实施方式,在具备第一实施方式和第二实施方式这两者的电力源的电动式工程机械中,能够在恰当的状态下使用电池62并防止电池62劣化,并且能够在恰当的电压范围内(恰当的状态下)使用ac/dc转换器64,使ac/dc转换器64(设备)恰当工作。
177.<第四实施方式>
178.使用图28至图32对本发明的第四实施方式进行说明。此外,关于与第一实施方式相同的部分省略说明。
179.图28是表示第四实施方式的驱动系统的图。在图28中,第四实施方式的驱动系统与第一实施方式的不同点是:在溢流油路4连接有检测液压泵1的排出压的压力传感器51;以及,压力传感器51与控制器50e电连接,控制器50e接收压力传感器51发送的压力信号。
180.控制器50e判定目标溢流压的当前值(一个采样时间之前的目标溢流压)p3(t-δt)与由压力传感器51检测出的液压泵1的排出压p51(t)之差是否小于预先设定的判定压差(上限压达到压差判定值)pd,当目标溢流压的当前值p3(t-δt)与液压泵1的排出压p51(t)之差为判定压差pd以上时,将此时的目标溢流压的当前值p3(t-δt)设定为目标溢流压p3(t)。
181.图29是表示第四实施方式中的控制器50e的功能的框图。
182.在图29中,第四实施方式中的控制器50e的功能与第一实施方式的不同点是:代替传感器信号转换部50a而具备传感器信号转换部50ae,在传感器信号转换部50ae中,接收从压力传感器70及压力传感器51发送来的信号,并基于该信号计算操作压p70(t)及液压泵1的排出压(泵排出压)p51(t);以及,代替压力上限值运算部50c而具备压力上限值运算部50ce,在压力上限值运算部50ce中,接收从传感器信号转换部50ae发送的操作压p70(t)及泵排出压p51(t)、从电力量信号转换部50d发送的蓄电量soc(t)、从常数
·
表存储部50b发送的常数信息和表信息,并运算目标溢流压。
183.图30是表示第四实施方式中的压力上限值运算部50ce的功能的框图。
184.在图30中,第四实施方式中的压力上限值运算部50ce的功能与第一实施方式的不同点是:代替目标溢流压计算部50c-4而具备目标溢流压计算部50c-4e,在目标溢流压计算部50c-4e中,还接收泵排出压p51(t)来计算目标溢流压p3(t)。
185.图31是表示第四实施方式中的目标溢流压计算部50c-4e的运算流程的流程图。
186.在图31中,第四实施方式中的目标溢流压计算部50c-4e的运算流程与第一实施方式的不同点是:在步骤s402中判定为是的情况下,进入步骤s407的处理而不是步骤s403的处理。
187.在步骤s407中,目标溢流压计算部50c-4e判定一个采样时间之前的目标溢流压p3(t-δt)与泵排出压p51(t)之差是否小于上限压达到压差判定值(以下称为判定压差)pd。在目标溢流压p3(t-δt)与泵排出压p51(t)之差小于判定压差pd的情况下,目标溢流压计算部50c-4e判定为是,并进入步骤s403的处理。在目标溢流压p3(t-δt)与泵排出压p51(t)之差为判定压差pd以上的情况下,目标溢流压计算部50c-4e判定为否,并进入步骤s408的
处理。
188.在步骤s408中,目标溢流压计算部50c-4e将目标溢流压p3(t)设定为一个采样时间之前的目标溢流压p3(t-δt)。而且,向输出信号转换部50z输出目标溢流压p3(t)。
189.接着,使用泵排出压及泵输出的演进例来说明第四实施方式的效果。
190.图32是表示第四实施方式中的泵排出压及泵输出的演进例的图。图32的最上方的曲线图表示操作压p70(t)的时间变化,中央的曲线图表示泵排出压的时间变化,最下方的曲线图表示泵输出(液压泵1的输出功率)。
191.另外,与第一实施方式的情况同样地,对蓄电量soc(t)小且例如为图7及图8的sa、降低溢流压pr(t)为最小溢流压prmin、溢流压增加量δp(t)为最大溢流压增加量δpmax与最小溢流压增加量δpmin之间的值δpa的情况进行说明。
192.与第一实施方式同样地,在时刻t1,操作压p70(t)超过阈值pith而泵排出压开始上升;在时刻t2,泵排出压与该时间点下的目标溢流压p3(t2)一致;在时刻t3,未进行本发明的控制的情况下的压力与该时间点的目标溢流压p3(t3)一致。
193.在时刻t5,目标溢流压p3(t5)与泵排出压p51(t5)之差成为判定压差pd以上。从该时间点起,在图31的步骤s407中判定为否,进入步骤s408的处理。通过步骤s408的处理,目标溢流压p3(t)成为一个采样时间之前的目标溢流压p3(t-δt),目标溢流压保持为恒定值。该处理持续到目标溢流压p3(t5)与泵排出压p51(t5)之差在时刻t6变为小于判定压差pd的时间点为止。
194.在时刻t6以后,由于目标溢流压p3(t)与泵排出压p51(t)之差小于判定压差pd,所以通过步骤s405的处理而目标溢流压增加。当在时刻t4超过通常时的溢流压pn之后,通过步骤s404的处理而将目标溢流压p3(t)设定为pn。
195.如上所述,在第四实施方式中也能获得与第一实施方式相同的效果。另外,在第四实施方式中,在泵排出压在暂且下降之后又即将再次急剧增加的情况下,也能够抑制泵排出压的上升,其结果是,能够度抑制因泵排出压的上升而导致的泵输出的增加、进而抑制电动马达60的消耗电力的增加,在更恰当的状态下使用电池62。
196.<第五实施方式>
197.使用图33至图36对本发明的第五实施方式进行说明。此外,关于与第四实施方式相同的部分省略说明。
198.第五实施方式中的驱动系统的结构与图28所示的第四实施方式相同。但是,控制器50e被变更为控制器50f。
199.控制器50f判定目标溢流压的当前值(一个采样时间之前的目标溢流压)p3(t-δt)与由压力传感器51检测出的液压泵1的排出压p51(t)之差是否小于预先设定的判定压差pd,当目标溢流压的当前值p3(t-δt)与液压泵1的排出压p51(t)之差为判定压差pd以上时,在直到目标溢流压p3(t)下降至第二溢流压(降低溢流压)pr(t)为止的期间内,将液压泵1的排出压p51(t)与判定压差pd相加而得到的值设定为目标溢流压p3(t)。
200.图33是表示第五实施方式中的控制器50f的功能的框图。
201.在图33中,第五实施方式中的控制器50f的功能与第四实施方式的不同点是:代替压力上限值运算部50ce而具备压力上限值运算部50cf,压力上限值运算部50cf的功能的一部分不同。
202.图34是表示第五实施方式中的压力上限值运算部50cf的功能的框图。
203.在图34中,第五实施方式中的压力上限值运算部50cf的功能与第四实施方式的不同点是:代替目标溢流压计算部50c-4e而具备目标溢流压计算部50c-4f,在目标溢流压计算部50c-4f中,目标溢流压p3(t)的计算方法不同。
204.图35是表示第五实施方式中的目标溢流压计算部50c-4f的运算流程的流程图。
205.在图35中,第五实施方式中的目标溢流压计算部50c-4f的运算流程与第四实施方式的不同点是:在步骤s407中判定为否的情况下,进入步骤s409的处理而不是步骤s408的处理。
206.在步骤s409中,目标溢流压计算部50c-4f判定泵排出压p51(t)与判定压差pd之和是否大于当前时间点的降低溢流压pr(t)。在泵排出压p51(t)与判定压差pd之和大于当前时间点的降低溢流压pr(t)的情况下,目标溢流压计算部50c-4f判定为是,并进入步骤s410的处理。在泵排出压p51(t)与判定压差pd之和为当前时间点的降低溢流压pr(t)以下的情况下,目标溢流压计算部50c-4f判定为否,目标溢流压计算部50c-4f进入步骤s406的处理。
207.在步骤s410中,目标溢流压计算部50c-4f将目标溢流压p3(t)设定为泵排出压p51(t)与判定压差pd之和。而且,向输出信号转换部50z输出目标溢流压p3(t)。
208.接着,使用泵排出压及泵输出的演进例来说明第五实施方式的效果。
209.图36是表示第五实施方式中的泵排出压及泵输出的演进例的图。图36的最上方的曲线图表示操作压p70(t)的时间变化,中央的曲线图表示泵排出压的时间变化,最下方的曲线图表示泵输出(液压泵1的输出功率)。
210.另外,与第一及第四实施方式的情况相同地,对蓄电量soc(t)小且例如为图7及图8的sa、降低溢流压pr(t)为最小溢流压prmin、溢流压增加量δp(t)为最大溢流压增加量δpmax与最小溢流压增加量δpmin之间的值δpa的情况进行说明。
211.与第四实施方式同样地,在时刻t1,操作压p70(t)超过阈值pith而泵排出压开始上升;在时刻t2,泵排出压与该时间点的目标溢流压p3(t2)一致;在时刻t3,未进行本发明的控制的情况下的压力与该时间点的目标溢流压p3(t3)一致。
212.在时刻t5,目标溢流压p3(t5)与泵排出压p51(t5)之差成为判定压差pd以上。从该时间点起,在图35的步骤s407中判定为否并进入步骤s409的处理,在步骤s409中判定为是并进入步骤s410的处理。通过步骤s410的处理,目标溢流压p3(t)成为泵排出压p51(t)与判定压差pd之和。其结果是,目标溢流压成为比p51(t)高恒定值的值。
213.从时刻t7起,泵排出压p51(t)开始增加。这样,由于目标溢流压p3(t)与泵排出压p51(t)之差变为小于判定压差pd,所以在步骤s407中判定为是并进入步骤s403的处理,在步骤s403中判定为否并进入步骤s405的处理。其结果是,目标溢流压p3(t)被设定为一个采样时间之前的目标溢流压p3(t-δt)与δp(t)之和。
214.如上所述,在第五实施方式中也能获得与第一实施方式相同的效果。另外,在第五实施方式中,在泵排出压在暂且下降之后又即将再次急剧增加的情况下,能够比第四实施方式更抑制泵排出压的上升,其结果是,能够抑制因泵排出压的上升而导致的泵输出的增加、进而抑制电动马达60的消耗电力的增加,在更恰当的状态下使用电池62。
215.附图标记说明
216.1:固定容量型的液压泵
217.1a:可变容量型的液压泵
218.2:油路
219.3:溢流阀
220.4:溢流油路
221.5:油箱
222.30、30a:调节器
223.42:方向控制阀
224.43:液压马达(执行机构)
225.44:操作杆装置
226.45:先导阀
227.50、50c、50d、50e、50f:控制器
228.51:压力传感器
229.60:电动马达
230.61:逆变器
231.62:电池(蓄电装置)
232.63:电池控制控制器
233.64:ac/dc转换器(外部电力转换装置)
234.65:外部电源
235.66:外部电池
236.70:压力传感器(操作状态检测装置)
237.72:梭阀。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。