一种mems多层薄膜材料杨氏模量在线提取装置及方法
技术领域
1.本发明属于多层薄膜材料技术领域,具体涉及一种mems多层薄膜材料杨氏模量在线提取装置及方法。
背景技术:
2.微电子机械系统(mems,micro-electro-mechanical system)是在微电子技术基础上发展起来的前沿研究领域。其基本特点是微型化、高集成度和高精度的批量制造。随着mems产业化的发展,mems产品的设计结构越来越复杂,表面微加工薄膜的层数越来越多,薄膜材料类型越来越多,对工艺线的要求也越来越高。目前一些mems器件在实际制作时,产品的一致性无法得到保障,而mems材料参数在线测试技术是监控加工工艺线的稳定性、一致性和均匀性,以及保证加工工艺线良率的关键。另一方面,受到不同工艺条件的影响,相同的薄膜材料往往呈现出不同的力学特性,获取mems多层薄膜材料的力学参数,可以用于设计、预测和优化mems产品的性能。
3.杨氏模量是薄膜材料最重要的力学参数之一,目前最常用的多层薄膜杨氏模量在线测试方法有谐振频率法和静电吸合法,其中,谐振频率法的测量精度高,但成本较高,测量速度相对较慢,静电吸合法能够实现低成本快速测量,但是吸合现象是一种不稳定状态,可重复性较差。
技术实现要素:
4.为解决现有技术中的不足,本发明提供一种mems多层薄膜材料杨氏模量在线提取装置及方法,具有操作简单,成本低,测量速度快,通用性强,可重复性高的优点。
5.为达到上述目的,本发明所采用的技术方案是:
6.第一方面,提供一种mems多层薄膜材料杨氏模量在线提取装置,包括若干组悬臂梁结构,其中,第m组悬臂梁结构中的多层薄膜材料的层数为m,m=1,2,
···
,n,n为待测多层薄膜材料的总层数;在每组悬臂梁结构中,包括固定在衬底材料同一表面上的锚区、驱动电极和接触电极,由多层薄膜材料形成的悬臂梁的一端固定于所述锚区,另一端位于所述接触电极的上方,所述驱动电极位于所述锚区和所述接触电极之间,且位于多层薄膜材料的下方。
7.进一步地,驱动电极与锚区之间的距离la满足:
8.la《3l/7
ꢀꢀꢀ
(8)
9.其中,l表示由多层薄膜材料形成的悬臂梁的长度。
10.进一步地,在每组所述悬臂梁结构中,由多层薄膜材料形成的悬臂梁的长度、宽度均相等。
11.进一步地,驱动电极上设置有驱动金属电极,接触电极上设置有接触金属电极。
12.第二方面,提供一种mems多层薄膜材料杨氏模量在线提取方法,采用第一方面所述的mems多层薄膜材料杨氏模量在线提取装置,包括:将每组悬臂梁结构中的锚区分别接
地;在每组悬臂梁结构中的驱动电极上分别施加扫描电压,当由多层薄膜材料形成的悬臂梁与接触电极发生接触时,记录此时施加在每组悬臂梁结构中的驱动电极上的电压值,记为:v1,v2,
……
,vn;将记录的电压值,分别代入接触电压表达式,求解得到由多层薄膜材料形成的悬臂梁中各层薄膜的等效杨氏模量。
13.进一步地,所述接触电压表达式为:
[0014][0015]
其中,g为悬臂梁与下电极之间的初始间距,a为驱动电极的宽度,b为悬臂梁的宽度,ε为空气介电常数,为第i层薄膜的等效杨氏模量,对于总层数为m的悬臂梁来说,i=1,2,3,
…
,m,i
mi
为总层数为m的悬臂梁的第i层薄膜截面对中性轴的惯性矩:
[0016][0017]
与现有技术相比,本发明所达到的有益效果:本发明采用静电执行原理,通过测量n组悬臂梁结构与接触电极发生接触时的驱动电压,计算得到各层薄膜的等效杨氏模量,在每组悬臂梁结构中,通过合理设置电极的位置,避开吸合这种不稳定状态,设计的mems多层薄膜材料杨氏模量在线提取装置及方法具有操作简单,成本低,测量速度快,通用性强,可重复性高的优点。
附图说明
[0018]
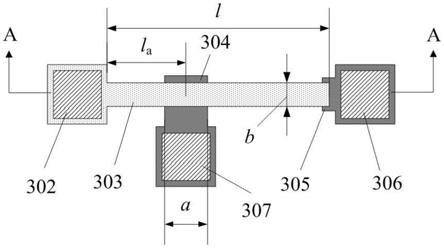
图1是本发明实施例中三层薄膜材料的悬臂梁结构的俯视图;
[0019]
图2是图1的a-a剖面图;
[0020]
图3是本发明实施例中二层薄膜材料的悬臂梁结构的俯视图;
[0021]
图4是图3的a-a剖面图;
[0022]
图5是本发明实施例中一层薄膜材料的悬臂梁结构的俯视图;
[0023]
图6是图5的a-a剖面图。
具体实施方式
[0024]
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0025]
对于一个m层等宽悬臂梁结构,其第i层薄膜的等效杨氏模量与薄膜宽度b、厚度hi、泊松比vi之间有如下关系:
[0026][0027]
假设中性面与梁下表面的距离为zc,则第i层薄膜沿x方向的应力σ
ix
可表示为:
[0028][0029]
且满足其中,κ为曲率,ai为第i层薄膜的横截面积,由此可以得到:
[0030][0031]
第i层薄膜截面对中性轴的惯性矩可以表示为:
[0032][0033]
当在驱动电极上施加驱动电压v时,悬臂梁在静电力fe的作用下发生弯曲,在小形
变条件下,挠度曲线w(x)可表示为:
[0034][0035]
当悬臂梁与接触电极发生接触时,驱动电极处的挠度与接触电极处的挠度存在如下几何关系:
[0036][0037]
由此可以得到,发生接触时的驱动电压:
[0038][0039]
基于上述原理,本实施例提供一种mems多层薄膜材料杨氏模量在线提取装置,包括n组悬臂梁结构,其中,第m组悬臂梁结构中的多层薄膜材料的层数为m,m=1,2,
···
,n;在每组悬臂梁结构中,包括衬底材料、固定在所述衬底材料同一表面上的锚区、驱动电极和接触电极,多层薄膜材料的一端固定于所述锚区,另一端位于所述接触电极的上方,所述驱动电极位于所述锚区和所述接触电极之间,且位于多层薄膜材料的下方。
[0040]
下面结合附图,以三层薄膜材料杨氏模量在线提取为例来对本范明技术方案进行进一步说明。
[0041]
如图1~图2所示,为三层薄膜材料的悬臂梁结构,包括一根由三层薄膜材料形成的三层悬臂梁303、第三锚区302、两个下电极,第三驱动电极304和第三接触电极305;三层悬臂梁303长度为l,宽度为b,各层厚度分别为h1、h2、h3,三层悬臂梁303一端通过第三锚区302固定在衬底1上,本实施例中,衬底1为表面淀积一层绝缘材料的硅衬底;第三接触电极305位于三层悬臂梁303自由端的正下方,第三驱动电极304的宽度为a,与第三锚区302之间的距离为la,且要求:
[0042]
la《3l/7
ꢀꢀꢀ
(8);
[0043]
第三驱动电极304和第三接触电极305的一端的上表面分别制作了第三驱动金属电极307和第三接触金属电极306,用于探针对第三驱动电极304施加激励、以及监测三层悬臂梁303是否与第三接触电极305接触。
[0044]
如图3~图4所示,为双层薄膜材料的悬臂梁结构,包括一根由双层薄膜材料形成的双层悬臂梁203、第二锚区202、两个下电极,第二驱动电极204和第二接触电极205;双层悬臂梁203长度为l,宽度为b,各层厚度分别为h1、h2,双层悬臂梁203一端通过第二锚区202固定在衬底1上;第二接触电极205位于双层悬臂梁203自由端的正下方,第二驱动电极204的宽度为a,与第二锚区202之间的距离为la,且要求:la《3l/7;第二驱动电极204和第二接触电极205的一端的上表面分别制作了第二驱动金属电极207和第二接触金属206,用于探针
对第二驱动电极204施加激励、以及监测双层悬臂梁203是否与第二接触电极205接触。
[0045]
如图5~图6所示,为单层薄膜材料的悬臂梁结构,包括一根由单层薄膜材料形成的单层悬臂梁103、第一锚区102、两个下电极,第一驱动电极104和第一接触电极105;单层悬臂梁103长度为l,宽度为b,厚度为h1,单层悬臂梁103一端通过第一锚区102固定在衬底1上;第一接触电极105位于单层悬臂梁103自由端的正下方,第一驱动电极104的宽度为a,与第一锚区102之间的距离为la,且要求la《3l/7;第一驱动电极104和第一接触电极105的一端的上表面分别制作了第一驱动金属电极107和第一接触金属电极106,用于探针对第一驱动电极104施加激励、以及监测单层悬臂梁103是否与第一接触电极105接触。
[0046]
基于上述的一种mems多层薄膜材料杨氏模量在线提取装置,多层薄膜材料杨氏模量在线提取方法,包括:
[0047]
将每组悬臂梁结构中的锚区分别接地;
[0048]
在每组悬臂梁结构中的驱动电极上分别施加扫描电压,当由多层薄膜材料形成的悬臂梁与接触电极发生接触时,记录此时施加在每组悬臂梁结构中的驱动电极上的电压值,记为:v1,v2,
……
,vn;
[0049]
将记录的电压值,分别代入接触电压表达式:
[0050][0051]
其中,g为悬臂梁与下电极之间的初始间距,a为驱动电极的宽度,b为悬臂梁的宽度,ε为空气介电常数,为第i层薄膜的等效杨氏模量,对于总层数为m的悬臂梁来说,i=1,2,3,
…
,n,i
mi
为总层数为m的悬臂梁的第i层薄膜截面对中性轴的惯性矩:
[0052][0053]
求解得到多层薄膜材料中各层薄膜的等效杨氏模量。
[0054]
具体地,分别对所述三组悬臂梁结构进行测量,将第一锚区102、第二锚区202、第三锚区303接地,在第一驱动电极104、第二驱动电极204、第三驱动电极304上施加扫描电压,当单层悬臂梁103、双层悬臂梁203、三层悬臂梁303分别与第一接触电极105、第二接触电极205、第三接触电极305发生接触时,记录此时第一驱动电极104、第二驱动电极204、第三驱动电极304上施加的电压大小,即接触电压v1,v2,v3;将测得的电压分别代入接触电压表达式,得到由3个方程构成的方程组,对所述方程组求解,得到各层薄膜的等效杨氏模量,所述方程组如下:
[0055][0056]
其中,g为悬臂梁与下电极之间的初始间距,a为驱动电极的宽度,b为悬臂梁的宽度,ε为空气介电常数,为第i层薄膜的等效杨氏模量,对于双层悬臂梁来说,i=1,2,对于三层悬臂梁来说,i=1,2,3,i
2i
和i
3i
分别为双层悬臂梁和三层悬臂梁的第i层薄膜截面对中性轴的惯性矩:
[0057][0058]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。