具有改进的自回正能力的胶囊装置
1.本发明涉及用于医疗诊断和/或疗法的胶囊装置,该胶囊装置适于插入患者的管腔中,其中胶囊装置具有相对于管腔壁的支撑表面自我定向的固有能力。
背景技术:
2.在本发明的公开内容中,主要提到通过递送药物有效载荷诸如递送用于治疗糖尿病的胰岛素来治疗疾病。然而,这仅仅是本发明的示例性用途。
3.人们可能患有诸如糖尿病的疾病,这需要他们定期且通常每天接受药物的注射。为了治疗他们的疾病,这些人需要执行不同的任务,所述任务可能被认为是复杂的,并且可能会感到不舒服。此外,需要他们在离开家时随身携带注射装置、针头和药物。因此,如果治疗可以基于口服片剂或胶囊,则将被认为是对此类疾病治疗的重大改进。
4.然而,这样的解决方案很难实现,因为基于蛋白质的药物在摄入时会被降解和消化而不是被吸收。
5.为了提供一种用于通过口服将胰岛素递送到血流中的有效解决方案,药物必须首先递送到胃肠道的管腔中,然后再递送到胃肠道的壁(管腔壁)中。这提出了几个挑战,其中包括:(1)必须防止药物被胃中的酸降解或消化。(2)药物必须在胃中或下胃肠道中,即在胃之后释放,这限制了药物释放的机会窗口。(3)药物必须在管腔壁处递送以限制暴露于胃中和下胃肠道中的流体的降解环境的时间。如果未在壁处释放,则药物在从释放点行进到壁期间可能会降解,或者可能通过下胃肠道而未被吸收,除非受到保护以免受分解流体的影响。
6.wo2018//213600a1公开了多种自回正制品,诸如自回正胶囊,其旨在被患者摄入到gi道中,以向患者提供诊断或疗法。自回正制品可被构造为单静态体,其由于质心的位置和自回正制品的形状而表现出在预定义取向上自我定向的固有能力,从而允许组织接口部件位于管腔壁的目标部位附近。
7.自回正胶囊相对于支撑表面自我定向的能力以及一旦获得就保持定位在预期取向上的能力取决于多种因素。在设计自回正胶囊期间,为了适应自回正制品的不同诊断和/或治疗作用,必须考虑多种设计因素。胶囊必须提供足够的自回正能力,同时仍然能够实现预期的诊断和/或治疗作用或功能。此外,胶囊的总体尺寸在许多应用中可能至关重要。例如,当以具有小尺寸的胶囊的足够负载能力为目标时,获得制品的期望质心可能具有挑战性,并且这可能导致自我定向能力降低。
8.考虑到上述内容,本发明的目的是提供一种用于插入患者的管腔中的自回正胶囊装置,其中在使用的情况下,当胶囊装置在管腔中的目标位置处由组织支撑时,胶囊装置表现出进入预定义取向的改进能力,并且一旦呈现预定取向,则维持预定义取向。本发明的另一个目的是在获得优异的自我定向能力的同时,提供在设计自我定向胶囊时的增加的自由度。
技术实现要素:
9.在本发明的公开内容中,将描述多个实施方案和方面,它们将解决上述目的中的一个或多个,或者将解决从下面的公开内容以及从示例性实施方案的描述将显而易见的目的。
10.因此,在本发明的第一方面,提供了一种适合于插入患者的管腔中的胶囊装置,所述管腔具有管腔壁,其中胶囊装置包括:
[0011]-胶囊壳体,该胶囊壳体具有被形成为圆形物体并限定外表面的外部形状,以及
[0012]-组织接口部件,该组织接口部件相对于胶囊壳体设置,该组织接口部件被构造成在目标位置处与管腔壁相互作用,
[0013]
其中胶囊装置被构造为具有几何中心和沿着第一轴线偏离几何中心的质心的自回正胶囊,其中当胶囊装置在定向成使得质心横向偏离几何中心的同时由管腔壁的组织支撑时,胶囊装置经受由于重力作用而导致的外部施加的扭矩以将胶囊装置定向成第一轴线沿着重力方向定向,从而使组织接口部件能够在目标位置处与管腔壁相互作用,
[0014]
其中胶囊装置的外表面的至少一部分具有表面特性,所述表面特性表现出选自由以下项组成的组的一个或多个表面特性:表面涂层、表面粗糙度、表面几何形状和表面微观几何形状,并且
[0015]
其中所述表面特性被选择为提供低摩擦诸如低静摩擦,从而当由于重力而导致的所述外部施加的扭矩作用于胶囊装置时,确保胶囊装置相对于管腔壁的组织的滑动移动。
[0016]
对于现有技术的胶囊,已建议将自回正胶囊构造为具有此类密度分布并且具有此类几何形状和表面特性,使得当由于重力而导致的扭矩作用于自回正胶囊时自回正胶囊在不相对于粘膜组织滑动的情况下滚动。与其中胶囊的表面部分提供相对大的摩擦系数的现有技术自回正胶囊相比,根据本发明的外表面的所提出的特性提供了胶囊装置相对于支撑管腔壁的滑动旋转。这对通过重力施加的自回正扭矩具有显著的影响,并且提供胶囊装置的改进的自回正。自回正的改进可用于确保更好且更快速的自回正,并且/或者可用于为胶囊装置提供改进的设计自由度,诸如胶囊装置内部的部件的布局和分布的自由度。
[0017]
胶囊装置的外表面的至少一部分的所述表面特性可被选择为使得当胶囊装置被支撑在水平表面上时,低静摩擦确保当由于重力而导致的所述外部施加的扭矩作用于胶囊装置时胶囊装置相对于管腔壁的组织的滑动移动。
[0018]
在一些实施方案中,整个胶囊外部具有所述表面特性。
[0019]
在其他实施方案中,胶囊装置的邻近组织接口部件的下部分诸如胶囊总外表面区域的下半表面区域包括具有所述表面特性的表面部分。
[0020]
在一些实施方案中,胶囊装置的外表面的至少一部分提供具有低于0.35诸如低于0.30、诸如低于0.25、诸如低于0.20、诸如低于0.15、诸如低于0.10、诸如低于0.05或诸如低于0.02的静摩擦系数的低摩擦表面。
[0021]
在一些实施方案中,胶囊装置的外表面的至少一部分提供具有介于0.01和0.35之间、优选地介于0.01和0.30之间、优选地介于0.01和0.25之间、优选地介于0.01和0.20之间、更优选地介于0.01和0.15之间、更优选地介于0.01和0.10之间并且更优选地介于0.01和0.05之间的静摩擦系数的低摩擦表面。
[0022]
在一些实施方案中,胶囊装置的外表面的至少一部分提供具有当润湿时介于0.01
和0.35之间、优选地介于0.01和0.30之间、优选地介于0.01和0.25之间、优选地介于0.01和0.20之间、更优选地介于0.01和0.15之间、更优选地介于0.01和0.10之间并且更优选地介于0.01和0.05之间的静摩擦系数的低摩擦表面。
[0023]
在一些实施方案中,所述表面特性被选择为向胶囊装置的外表面的所述至少一部分提供静摩擦系数介于0.01和0.35之间的低摩擦。
[0024]
在其他实施方案中,所述表面特性被选择为向胶囊装置的外表面的所述至少一部分提供静摩擦系数介于0.01和0.25之间的低摩擦。
[0025]
对于一些实施方案,一个或多个表面特性被选择为包括具有大约0.01-0.20、诸如0.01-0.10、诸如0.01-0.06的静摩擦系数的表面区域。
[0026]
对于一些实施方案,静摩擦系数为大约0.02-0.05。
[0027]
对于一些实施方案,对于用于胶囊装置外表面的抛光材料,示例性表面光洁度可以ra 0.02至ra 0.80的范围提供。
[0028]
在一些形式中,组织接口部件包括治疗有效载荷、诊断装置和组织保持装置诸如组织锚定装置中的至少一者。
[0029]
在胶囊装置的其他实施方案中,组织接口部件包括或限定治疗有效载荷,该治疗有效载荷被构造成在目标位置处提供治疗有效载荷的至少一部分向管腔壁的释放。
[0030]
治疗有效载荷可被设置或被构造成可设置在胶囊装置中,其中治疗有效载荷被构造用于从胶囊排出到目标位置处的管腔壁中。
[0031]
在一些形式中,胶囊装置还包括被设置或可设置在胶囊装置中的递送构件,该递送构件被成形为穿透管腔壁的组织,并且具有组织穿透端和与组织穿透端相对的尾端,其中递送构件被构造成从储集器递送治疗有效载荷或包括治疗有效载荷。
[0032]
在一些实施方案中,胶囊装置还包括致动器,该致动器联接到递送构件并且具有第一构型和第二构型,递送构件在致动器处于第一构型时保持在胶囊内,其中递送构件被构造成通过致动器从第一构型移动到第二构型而从胶囊推进并进入管腔壁中。
[0033]
在一些形式中,递送构件可作为完全由包括治疗有效载荷的制剂形成的固体提供,其中递送构件由可溶解材料制成,该可溶解材料在插入管腔壁的组织中时溶解以将治疗有效载荷的至少一部分递送到组织中。
[0034]
在其他形式中,递送构件是注射针,其中治疗有效载荷作为液体、凝胶或粉末提供,所述液体、凝胶或粉末可通过注射针从胶囊内的储集器排出。
[0035]
在一些实施方案中,致动器包括与递送构件相关联的能量源,该能量源被构造用于通过致动器从第一构型移动到第二构型来为递送构件提供动力以从胶囊推进并进入管腔壁中。
[0036]
在另外的实施方案中,致动器可包括能量源,诸如驱动弹簧。弹簧被张紧或被构造用于张紧以为递送构件提供动力。驱动弹簧可以呈压缩弹簧、拉伸弹簧、扭力弹簧或板簧的形式提供。
[0037]
在一些形式中,胶囊装置包括可溶解击发构件,该可溶解击发构件在经受生物流体时至少部分地可溶解,其中可溶解击发构件在至少部分地溶解时允许能量从能量源释放,使得递送构件从胶囊推进并进入管腔壁中。
[0038]
在一些实施方案中,胶囊装置限定可摄取胶囊,该可摄取胶囊具有形状和大小被
设定为被患者摄取的胶囊壳体。患者可以是人类患者。
[0039]
在不同的实施方案中,胶囊装置可被构造用于将治疗有效载荷从胶囊释放到患者的胃的管腔壁、大肠的管腔壁和小肠的管腔壁中的一者中。
[0040]
在本发明的第二方面,提供了一种适合于摄入gi道的管腔中的胶囊装置,所述管腔具有管腔壁,其中胶囊装置包括:
[0041]-胶囊壳体,该胶囊壳体具有被形成为圆形物体并限定外表面的外部形状,以及
[0042]-组织接口部件,该组织接口部件相对于胶囊壳体设置,该组织接口部件被构造成在目标位置处与管腔壁相互作用,
[0043]
其中胶囊装置被构造为具有几何中心和沿着第一轴线偏离几何中心的质心的自回正胶囊,其中当胶囊装置在定向成使得质心横向偏离几何中心的同时由管腔壁的组织支撑时,胶囊装置经受由于重力作用而导致的外部施加的扭矩以将胶囊装置定向成第一轴线沿着重力方向定向,从而使组织接口部件能够在目标位置处与管腔壁相互作用,
[0044]
其中胶囊装置的外表面的至少一部分提供具有低于0.35诸如低于0.30、诸如低于0.25、诸如低于0.20、诸如低于0.15、诸如低于0.10、诸如低于0.05或诸如低于0.02的静摩擦系数的低摩擦表面。
[0045]
在一些实施方案中,胶囊装置的外表面的至少一部分提供具有介于0.01和0.35之间、优选地介于0.01和0.25之间、优选地介于0.01和0.20之间、更优选地介于0.01和0.15之间、更优选地介于0.01和0.10之间并且更优选地介于0.01和0.05之间的静摩擦系数的低摩擦表面。
[0046]
在一些实施方案中,胶囊装置的外表面的至少一部分提供具有当润湿时介于0.01和0.35之间、优选地介于0.01和0.25之间、优选地介于0.01和0.20之间、更优选地介于0.01和0.15之间、更优选地介于0.01和0.10之间并且更优选地介于0.01和0.05之间的静摩擦系数的低摩擦表面。
[0047]
在另外的实施方案中,以上结合第一方面提及的任何特征与第二方面的特征组合提供。
[0048]
如本文所用,术语“药物”或“有效载荷”意在涵盖能够递送到指定目标部位中或上的任何药物制剂。药物可以是单一药物化合物或预混合或共同配制的多药物化合物。代表性药物包括固体、粉末或液体形式的药品,诸如肽(例如胰岛素、含胰岛素的药物、含glp-1的药物及其衍生物)、蛋白质和激素、生物衍生或活性剂、基于激素和基因的药物、营养配方和其他物质。具体地,药物可以是胰岛素或含glp-1的药物,这包括其类似物以及与一种或多种其他药物的组合。
附图说明
[0049]
将参考附图描述本发明的以下实施方案,其中
[0050]
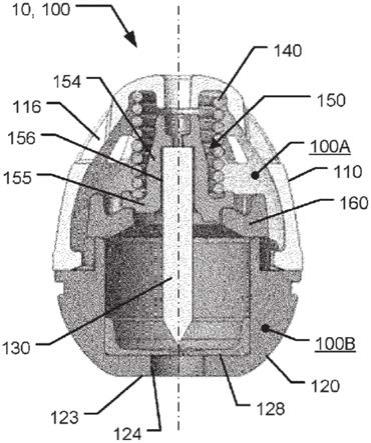
图1示出了被构造用于固体剂量递送的胶囊装置的剖面侧视图,该胶囊装置代表现有技术胶囊装置10和根据本发明的胶囊装置的第一实施方案100,该装置呈现预击发构型,
[0051]
图2a和图2b示出了图1所示的胶囊装置的各种几何定义,其中装置被施加到重力场并且被定向用于与接触点p中的管腔壁单点接触,
[0052]
图2c以四个不同取向示出图1的胶囊装置,
[0053]
图3a示意性地示出了与支撑表面单点接触的图1的胶囊装置10,该装置被构造用于在不相对于表面滑动的情况下滚动,
[0054]
图3b示意性地示出了与支撑表面单点接触的图1的胶囊装置100,该装置被构造用于在相对于表面滑动的情况下滚动,
[0055]
图4a示意性地示出了与支撑表面线接触的图1的胶囊装置10,该装置被构造用于在不相对于表面滑动的情况下滚动,
[0056]
图4b示意性地示出了与支撑表面线接触的图1的胶囊装置100,该装置被构造用于在相对于表面滑动的情况下滚动,
[0057]
图5示出了图1所示的胶囊装置的各种几何定义和公式,其中装置被施加到重力场并且被定向用于与接触点p中的管腔壁线接触,
[0058]
图6a示出了根据本发明的胶囊装置的第二实施方案200的剖面侧视图,该装置呈现预击发构型,
[0059]
图6b是在给定取向上的第二实施方案200的接触点分析,该图描绘了对应于进入管腔壁中的三个不同水平的突起高度(h)的三个计算值,
[0060]
图6c示出了第二实施方案200的计算的扭矩水平作为仰角(θ)的函数的曲线,
[0061]
图7a示出了根据本发明的胶囊装置的第三实施方案300的剖面侧视图,该装置呈现预击发构型,
[0062]
图7b是在给定取向上的第三实施方案300的接触点分析,该图描绘了对应于进入管腔壁中的三个不同水平的突起高度(h)的三个计算值,
[0063]
图7c示出了第三实施方案300的计算的扭矩水平作为仰角(θ)的函数的曲线,
[0064]
图8分别是第一实施方案、第二实施方案和第三实施方案的计算的扭矩水平作为仰角(θ)的函数的比较,所述扭矩水平被计算为与管腔壁的单点接触,
[0065]
图9a和图9b各自示出了根据本发明的被构造用于固体剂量递送的胶囊装置的第四实施方案的剖面前视图,该装置分别呈现预击发构型和击发构型,
[0066]
图10示意性地示出了用于根据本发明的方面的胶囊装置中的压头和固体剂量递送构件的组件的三种不同构型,
[0067]
图11示意性地示出了用于击发胶囊装置中的压头的成对的可变形闩锁和保持部分组件的四种不同构型,
[0068]
图12示意性地示出了能够实现固体递送构件与压头之间的固体剂量递送脱离的胶囊和压头组件的三种不同构型,
[0069]
图13a、图13b和图13c各自示出了胶囊装置的第五实施方案的剖面前视图,该装置被构造用于液体剂量递送,其中该装置分别呈现预击发构型、击发构型和剂量终止构型,
[0070]
图14是对应于图13c所示的前视图的剖面侧视图,
[0071]
图15示出了图6a所示的第二实施方案胶囊装置200的各种几何定义,并且
[0072]
图16是表示各种几何定义的球形胶囊装置的示意性表示。
[0073]
在附图中,类似的结构主要由类似的附图标记标识。
具体实施方式
[0074]
当使用诸如“上”和“下”、“右”和“左”、“水平”和“竖直”或类似的相对表达的以下术语时,这些术语仅仅参考附图,而未必是实际的使用情境。所示附图是示意性表示,由于该原因,不同结构的构型以及它们的相对尺寸仅用于说明目的。当术语构件或元件用于给定部件时,它通常指示在所述实施方案中部件是单一部件,然而,相同构件或元件可以另选地包括多个子部件,就像所述部件中的两个或更多个可以作为单一部件被提供,例如作为单个注塑件被制造。术语“组件”和“子组件”并不意味着所述部件必须可以被组装以在给定组装过程期间提供单一或功能组件或子组件,而仅用于将组合在一起的部件描述为在功能上更紧密相关。
[0075]
参考图1,示出了表示自回正胶囊10的第一示例性装置。胶囊装置10适合于由患者摄取以允许胶囊装置进入胃腔,随后相对于管腔壁定向,并最终部署固体剂量药物有效载荷以用于插入胃壁的粘膜组织中的目标位置。胶囊装置10利用wo 2018/213600 a1中公开的一些一般原理,以实现胶囊相对于胃壁的自我定向,并部署固体剂量有效载荷以用于药物施用。
[0076]
可摄取的自回正胶囊装置10包括具有平均密度的第一部分100a、具有与第一部分100a的平均密度不同的平均密度的第二部分100b。胶囊装置10容纳有效载荷部分130,用于运载用于在摄取制品的受试者用户内部释放的试剂。在所示的实施方案中,胶囊装置在部署前的平均密度大于胃肠液的平均密度,使胶囊装置能够下沉到胃腔的底部。自回正制品的外部形状可以是gomboc形状,即gomboc型形状,当以该形状的单一稳定取向以外的任何取向放置在表面上时,该形状将倾向于重新定向为其单一稳定取向。
[0077]
在图1中,对于所示的示例性装置10,胶囊被成形为使得其具有中心对称轴线。当装置的底部表面123在重力方向上向下时,装置的中心对称轴线竖直地延伸。所示的胶囊装置10包括上(近侧)胶囊部分110,其配合并附接到下(远侧)胶囊部分120。上胶囊部分110和下胶囊部分120一起形成装置的胶囊壳体。胶囊限定内部中空部,该内部中空部容纳有效载荷部分130、形成保持有效载荷部分130的针毂的压头150、以及击发和推进机构,该击发和推进机构包括被构造成击发和向前驱动具有有效载荷的针毂以进行药物递送的致动器。由有效载荷接口部分156保持在压头150上的有效载荷部分130沿着与中心轴线同轴延伸的击发轴线定向。有效载荷被构造用于沿着击发轴线移动。在所示的实施方案中,上和下胶囊部分110、120形成围绕击发轴线基本上对称的旋转对称部分。在图1中,装置10被定向成击发轴线竖直指向,并且有效载荷部分130竖直向下指向居中布置在下胶囊部分120中的出口孔124,该出口孔允许有效载荷部分130通过出口孔输送并移动到胶囊装置10之外。下部分120包括组织接合表面123,该组织接合表面被形成为围绕出口孔124的基本上平坦的下外表面。
[0078]
在所示的实例中,有效载荷部分130限定部分或完全由包括治疗有效载荷的制剂形成的固体递送构件。在所示的实施方案中,固体递送构件被形成为成形为穿透管腔壁的组织的细圆柱杆,该圆柱杆具有组织穿透端和与组织穿透端相对的尾端。杆的组织穿透端是尖的以便于容易插入管腔壁的组织中,而在所示的实施方案中,尾端限定通过90度切割切断的截头圆柱体。适合由胶囊装置400递送的药物的非限制性实例是干燥压缩的api,诸如胰岛素。由于固体递送构件(有效载荷部分130)的形状被形成为细杆,因此递送构件适合
于被压入目标位置处的组织中,在所述目标位置处,在递送构件开始降解之后,经由目标位置处的粘膜组织释放药物。
[0079]
示例性装置10的击发和推进机构包括驱动弹簧140形式的致动器。驱动弹簧以螺旋压缩弹簧的形式提供,所述螺旋压缩弹簧在处于致动之前的状态中时在被形成为上胶囊部分110中的面向远侧表面的上弹簧座与由布置在压头150的远侧部分处的凸缘155的面向近侧表面形成的下弹簧座之间维持初始压缩状态。在初始预击发状态下,驱动弹簧140与压头150同轴布置,使得驱动弹簧部分地围绕压头150的近侧管状部分154。
[0080]
在示例性装置10中,在击发胶囊装置10之前,驱动弹簧140借助于圆盘160保持初始压缩状态,所述圆盘充当可溶解击发构件,该可溶解击发构件提供保持力以使驱动弹簧140维持其压缩状态。圆盘160被布置在面向近侧的圆盘安装表面与压头150上的凸缘155的面向远侧的表面之间,所述圆盘安装表面被布置在下胶囊部分120中。圆盘160由在经受流体诸如胃液时溶解的材料制成。因此,圆盘160可释放地将驱动弹簧140保持在其初始压缩状态,直到圆盘被充分溶解,使得驱动弹簧140的力克服圆盘的保持力,从而释放驱动弹簧。在所示的实例中,胶囊装置10包括用于将胃液引入胶囊内以实现与圆盘160的流体相互作用的多个开口116。
[0081]
在自回正胶囊装置中,通过具有使胶囊装置在中心轴线沿重力方向定位的情况下静止的设计并且其中胶囊的几何中心和质心从几何中心朝向装置底部123向下轴向偏离,当胶囊装置在被定向成使得质心横向偏离几何中心的同时由支撑表面支撑时,胶囊装置经受由于重力而导致的外部施加的扭矩。该扭矩用于定向胶囊装置,其中第一轴线沿着重力方向定向,以使组织接合表面123能够在目标位置处与管腔壁相互作用。
[0082]
在所示的实施方案中,由于整个胶囊装置10的密度分布,并且由于装置的外部形状,胶囊装置10将倾向于将自身定向成中心轴线大致垂直于表面(例如,大致正交于重力的表面、组织的表面,诸如胃肠道壁)。因此,胶囊装置倾向于相对于重力方向定向,使得组织接合表面123竖直面向下。
[0083]
在将胶囊装置10摄入胃中之后,胃液将进入胶囊中并开始与圆盘160相互作用。在经过预定时间之后,圆盘160将充分溶解以使得压头150朝向出口孔124向远侧推动。当压头撞击被布置在下胶囊部分120内部的面向远侧的压头止动表面128时,压头150的移动将停止。在该状态中,有效载荷部分130的主要部分已被推到胶囊装置10的出口孔124的外部,并且由于组织接合表面123面向下与胃壁的下部分接触,有效载荷部分130已被注入粘膜组织中,之后有效载荷部分130从压头150的有效载荷接口部分156断开连接,从而使有效载荷部分插入组织中。
[0084]
图1所示的自回正胶囊10的高度为约12.1mm,并且最大横向尺寸为约10.0mm。未部署的胶囊的质心位于与底部表面123相距3.6mm处。示例性胶囊装置10的胶囊部分已被选择为用于上部分110的聚己内酯(pcl)和用于下部分120的316l不锈钢。
[0085]
对于现有技术的胶囊,已建议将自回正胶囊10构造为具有此类密度分布并且具有此类几何形状和表面特性,使得当由于重力而导致的扭矩作用于自回正胶囊时自回正胶囊在不相对于粘膜组织滑动的情况下滚动。
[0086]
然而,根据本发明,胶囊装置可被设置有表面,该表面确保自回正期间与胃壁的相互作用模式将是导致胶囊表面与支撑胃壁的表面之间的滑动的滚动移动。在下文中,呈现
了用于分析经由重力实现自回正的理论框架。在下文中,图1的胶囊装置10表示示例性胶囊10,其中胶囊的表面部分是相对高摩擦表面,而示例性胶囊装置100(第一实施方案)表示具有相似的整体设计但具有被提供为低摩擦表面的表面部分的胶囊。
[0087]
作为研究胶囊装置10相对于支撑表面自我定向的能力的辅助工具,图2a和图2b示出了图1所示的胶囊装置的不同几何定义,其中装置被施加到重力场并且被定向用于与接触点p中的管腔壁单点接触。胶囊装置10的质心位于点o处,其中坐标系的原点位于点o处,x轴与胶囊装置10的中心轴线(击发轴线)平行,并且y轴正交地指向中心轴线。胶囊10与支撑表面之间的接触位置、单点接触被表示为p。
[0088]
仰角θ表示y轴与在质心o与接触点p之间延伸的线之间的角度。角度β表示y轴与重力之间的角度,而自回正角(倾斜角)被定义为=φ=θ
–
β。
[0089]
图2b示出了胶囊装置10在示例性取向上并且相对于支撑表面的上述角度。支撑表面正交于重力场布置,因此支撑表面表示患者的胃壁的下部分。对于处于所示取向的胶囊装置10,横向于接触点p定位的质心o产生作用于胶囊装置上的扭矩τ。对于大于0的倾斜角φ,扭矩将是正的,因此用于使胶囊装置定向成底部表面123面向下。
[0090]
图2c还示意性地示出了胶囊装置10相对于支撑表面的四个不同的示例性取向。
[0091]
图3a示出了其中胶囊装置在没有滑动(摩擦)的情况下滚动的案例,其中装置围绕点pc、pr并且以给定为τ=r
⊥
mg的扭矩旋转。
[0092]
图3b示出了其中胶囊装置在有滑动(无摩擦)的情况下滚动的案例,其中装置围绕点pr并且以给定为τ=r
⊥
mg的扭矩旋转。两个案例(摩擦和无摩擦)的扭矩臂具有相同的量值,因此作用于胶囊装置的扭矩是相同的。
[0093]
接下来被认为是两个案例,其中胶囊装置由于其重量而在软粘膜组织上施加表面压力,导致粘膜组织相对于周围区域被压下。这对应于组织的凹陷,例如具有诸如大约0.2-0.6mm的突起深度h。图4a和图4b代表该条件,并且可以看出,两个案例(摩擦和无摩擦)的扭矩臂r
⊥
显著不同。因此,对于具有相同形状和密度分布的两个装置,作用于装置10上的扭矩(图4a)将比作用于装置100上的扭矩(图4b)小得多。对于这两个案例,外部接触点表示为p
c1
和p
c2
。
[0094]
图5示出了胶囊装置10、100的不同几何定义和用于计算扭矩臂的公式,以及摩擦案例和滑动案例的所得扭矩。扭矩的计算可以在编程脚本中自动完成,所述编程脚本将装置形状、装置质量和装置质心作为输入。使用表示由于重力而作用于胶囊装置的扭矩作为胶囊装置的仰角的函数的扭矩曲线,可以确定胶囊装置的关键表面部分,即,其中用于获得滑动移动的表面特性将是有益的表面部分。通常,胶囊装置的外表面的主要部分诸如整个胶囊外表面可以作为低摩擦表面提供。然而,在一些实施方案中,低摩擦表面具体地在与支撑组织接触的表面部分处提供以呈仰角,其中据发现,扭矩低,即,其中自回正能力相对较低。
[0095]
用于提供低摩擦表面的任何已知方法可用于例如通过利用表面抛光(表面粗糙度)、表面几何形状、表面微观几何形状和表面涂层来设计低摩擦胶囊。为胶囊装置100的表面提供低摩擦系数的非限制性实例可以是或包括表面处理,诸如从医疗器具已知的表面涂层,诸如用于引入体腔中的导管。示例性表面涂层包括如wo 2019/034222 a1和wo 98/58988 a1中所公开的那些从导尿管已知的材料、涂层和组合物。示例性表面特性包括具有
大约0.01-0.20、诸如0.01-0.1的静摩擦系数的表面。对于一些实施方案,静摩擦系数为大约0.02-0.05。对于用于胶囊装置外表面的抛光材料,示例性表面光洁度可以ra 0.02至ra 0.80的范围提供。
[0096]
图6a示出了根据本发明的胶囊装置200的第二实施方案。自回正胶囊200的高度为约15.1mm,并且最大横向尺寸为约12.0mm。未部署的胶囊的质心位于与底部表面123相距3.2mm处,而体积中心位于与底部相距6.8mm处。第二实施方案胶囊装置200的胶囊部分已被选择为用于上部分110的聚己内酯(pcl)和用于下部分120的316l不锈钢。胶囊装置200的布局已相对于胶囊装置100重新设计,以主要通过降低圆盘160的位置来提供较低的质心。此外,胶囊下部分120的材料厚度已增加。胶囊装置200的质量为3.5g。
[0097]
结合图6b和图6c,对于第二实施方案胶囊装置200,已经对接触点和所得扭矩如何作为突起深度的函数而改变进行了分析。图6b是一个特定仰角θ的图表。突起深度h表示装置将突出到组织中多远。随着h的变化,装置与组织之间的接触区域也将改变。图6b的图表中的接近竖直线分别示出了0mm、0.2mm、0.4mm和0.6mm突起深度的组织表面。星形表示这些突起深度中的每一个的所得旋转中心。
[0098]
对于每一组突起高度,已用作为输出提供的所得扭矩进行所有仰角的数字计算。图6c示出了滑动案例(具有低摩擦表面的胶囊装置200)以及摩擦案例(类似于装置200但具有高摩擦表面的胶囊装置)的结果。黑线表示对应于单一接触案例的突起高度0mm。显而易见的是,与摩擦案例相比,胶囊装置200与所有突起深度的通过重力施加的明显较高的自回正扭矩相关联。
[0099]
图7a示出了根据本发明的胶囊装置300的第三实施方案。自回正胶囊300的高度为约12.7mm,并且最大横向尺寸为约12.0mm。未部署的胶囊的质心位于与底部表面123相距2.5mm处,而体积中心位于与底部相距5.8mm处。第二实施方案胶囊装置300的胶囊部分已被选择为用于上部分110的聚酰胺和用于下部分120的316l不锈钢。胶囊装置300的质量为2.2g。胶囊装置300的布局已相对于胶囊装置100和200重新设计以提供近球形外部形状,同时仍获得低质心。
[0100]
结合图7b和图7c,对于第三实施方案胶囊装置300,已经对接触点和所得扭矩如何作为突起深度的函数而改变进行了分析。图7b是一个特定仰角θ的图表。突起深度h表示装置将突出到组织中多远。随着h的变化,装置与组织之间的接触区域也将改变。图7b中的图表中的接近竖直线分别示出了0mm、0.2mm、0.4mm和0.6mm突起深度的组织表面。星形表示这些突起深度中的每一个的所得旋转中心。
[0101]
再次,对于每一组突起高度,已用作为输出提供的所得扭矩进行所有仰角的数字计算。滑动案例(具有低摩擦表面的胶囊装置300)以及摩擦案例(类似于装置300但具有高摩擦表面的胶囊装置)的结果示于图7c中。黑线表示对应于单一接触案例的突起高度0mm。同样对于该案例,显而易见的是,与摩擦案例相比,胶囊装置300与所有突起深度的通过重力施加的明显较高的自回正扭矩相关联。
[0102]
图8示出了在单个接触点即具有0.0mm的突起深度的情况下,自回正胶囊装置的上述实施方案即第一实施方案100、第二实施方案200和第三实施方案300的比较。胶囊装置300显示出最佳自回正特性,即使其具有最低的装置质量。正扭矩(τ》0)表示在期望方向上自回正。角度θ《-40度的胶囊装置300的负值是由数值误差引起的。
[0103]
具体地,从图6c和图7c可以得出结论,对于自回正胶囊装置200和300,在所有取向上确保良好的自回正特性,条件是装置的与组织接触的外表面部分对于静摩擦系数具有低值。这自然最切合于其中扭矩被认为相对低的仰角,即切合于所研究的实施方案,通常切合于较低的θ角。
[0104]
为了估计其中自回正胶囊装置通过围绕其自身旋转在自回正中由于摩擦而受到阻碍的临界摩擦系数,考虑以下实例。
[0105]
通过图6c和图7c,需注意,自回正扭矩通常似乎围绕接触点仰角θ≈-30
°
为最低,即最临界的情况。基于该条件,将研究当装置在该位置中从静止开始时由重力和摩擦产生的扭矩。参考图15,其表示被布置成该成角度的起始位置的第二实施方案自回正胶囊装置200。正如在许多实验中所观察到并且在理论上所预测的那样,装置围绕“自身”旋转,即,旋转点被视为接近体积中心。在接触点仰角为θ≈-30
°
的情况下也是如此。因此,我们大致将体积中心(参见图15中的黑色十字)作为该分析的旋转中心。因此,为了理解自回正,我们研究了围绕该点的所得扭矩。
[0106]
参见图15,涉及的变量如下:
[0107]
·m–
装置质量[kg]
[0108]
·g–
重力加速度[m/s2]
[0109]
·dgrav-从质心(灰色十字)到旋转中心(黑色十字)的垂直(水平)距离[mm]
[0110]
·
h-质心(灰色十字)与近似旋转中心(黑色十字)之间的距离[mm]
[0111]
·
α
–
当
[0112]
·
接触角为θ=-30时水平线与装置中心线之间的角度
°
[
°
]
[0113]
·dfric-从最低接触点
[0114]
到旋转中心(黑色十字)的垂直(竖直)距离[mm]
[0115]
力:
[0116]
·
重力:f
grav
=-mg ey(作用于质心处)
[0117]
·
摩擦力:f
fric
=-mgμe
x
(最坏情况:作用于最低接触点处)
[0118]
扭矩(围绕体积中心,用黑色十字标记):
[0119]
·
重力扭矩:τ
grav
=-d
gravfgrav
=h cos(α)mg
[0120]
·
摩擦力:τ
fric
=d
fricffric
=-d
fric mgμ
[0121]
总扭矩必须为正,才能确保自回正:
[0122]
τ
tot
=τ
grav
τ
fric
>0
[0123]
主要关注两个力:1)重力f
grav
和2)装置与其所位于的基底之间的摩擦力f
fric
,参见图15。
[0124]
重力由f
grav
=-mg ey给出,其中m为装置质量,并且g为重力加速度,其产生围绕旋转中心的正扭矩τ
grav
>0,倾向于逆时针旋转装置,从而进行自回正。通过找到从力的攻击点(质心,用灰色十字表示)到旋转中心的水平距离(垂直于重力)来识别扭矩d
grav
,给出扭矩:
[0125]
τ
grav
=-d
grav f
grav
=h cos(α)mg.
[0126]
如果可能,摩擦力将抵抗装置与基底之间的这种滑动运动。产生摩擦力的soma装
置上的法向力分布在接触区域上,但出于我们的目的,我们会考虑最坏的情况:即总摩擦力是否作用于一个单一点,在该点处,总摩擦力可以产生最大可能扭矩以抵抗滑动运动。这是接触区域上的与旋转中心具有最大垂直距离的点,即最低接触点,给出距离d
fric
。在该接触点处,总摩擦力为f
fric
=-mgμe
x
,其中μ为装置与基底之间的静摩擦系数,其产生负扭矩τ
fric
<0,抵抗逆时针方向的扭矩(摩擦本身不会使装置沿顺时针方向旋转,它始终是相对力)。摩擦扭矩的臂是从最低接触点到旋转点的垂直距离(垂直于摩擦力)d
fric
。摩擦扭矩变为
[0127]
τ
fric
=-d
fric f
fric
=d
fric
μmg.
[0128]
在摩擦力能够阻碍自回正的情况下,摩擦扭矩精确地平衡重力扭矩
[0129]
τ
grav
τ
fric
=0,μ=μc.
[0130]
使两个扭矩相等,并求得摩擦系数,我们找到了临界摩擦系数
[0131][0132]
即为了确保soma装置的自回正,我们必须确保μ<μc,意味着期望的摩擦系数应低于临界摩擦系数μc.
[0133]
在以下三种情况下分析:1)来自球面几何形状的简化估计值,2)结合图6a、图6b和图6c讨论的第二实施方案胶囊装置200的估计值,以及3)结合图7a、图7b和图7c讨论的第三实施方案胶囊装置300的估计值。
[0134]
实施例1.简化球形装置
[0135]
对于这种情况,装置在局部被认为是具有半径r的球形,参见图16。
[0136]
力
[0137]
·
重力:f
grav
=-mg ey[0138]
·
摩擦力:f
fric
=-mgμe
x
[0139]
扭矩(围绕体积中心,用黑色十字标记)
[0140]
·
重力扭矩:τ
grav
=d
grav
[0141]
摩擦力:τ
fric
=-d
fric f
fric
=-r mgμ
[0142]
总扭矩必须为正,才能确保自回正:
[0143]
τ
tot
=τ
grav
τ
fric
>0
[0144]
对于质心,我们观察到许多所提出的自我定向胶囊装置具有与所述质心的相似(或甚至更低)的质心,所以在此并且α=60
°
,并且对于摩擦力,我们具有d
fric
=r。临界系数变为
[0145][0146]
因此,基于这些计算,为了确保根据实施例1的球形装置进行滑动移动,接触组织的外表面的表面特性应具有低于0.25且理想地甚至更低的摩擦系数。需注意,该结果源于简化案例。
[0147]
实施例2.自回正胶囊装置,第二实施方案
[0148]
对于结合图6a、图6b和图6c描述的第二实施方案自回正胶囊装置200,我们具有以下条件:
[0149]
h=3.6mm,α=42
°
并且d
fric
=7.3mm
[0150]
μc=0.37
[0151]
因此,基于该设计,为了确保根据实施例2的装置进行滑动移动,接触组织的外表面的表面特性应具有低于0.37且理想地甚至更低的摩擦系数。
[0152]
实施例3.自回正胶囊装置,第三实施方案
[0153]
对于结合图7a、图7b和图7c描述的第三实施方案自回正胶囊装置300,我们具有以下条件:
[0154]
h=3.4mm,α=56
°
并且d
fric
=6.6mm
[0155]
·
μc=0.29
[0156]
因此,基于该设计,为了确保根据实施例3的装置进行滑动移动,接触组织的外表面的表面特性应具有低于0.29且理想地甚至更低的摩擦系数。
[0157]
实施例结束
[0158]
现在转到图9a和图9b,示出了可摄取的自回正胶囊装置400的第四实施方案。装置400包括具有平均密度的第一部分100a、具有与第一部分100a的平均密度不同的平均密度的第二部分100b。胶囊装置400容纳有效载荷部分130,用于运载用于在摄取制品的受试者用户内部释放的试剂。在所示的实施方案中,胶囊装置在部署前的平均密度大于胃肠液的平均密度,使胶囊装置能够下沉到胃腔的底部。自回正制品的外部形状是gomboc形状,即gomboc型形状,当以该形状的单一稳定取向以外的任何取向放置在表面上时,该形状将倾向于重新定向为其单一稳定取向。同样对于该实施方案,已通过使用具有低摩擦的胶囊外表面获得优异的自回正能力。
[0159]
所示的胶囊装置包括上(近侧)胶囊部分110,其配合并附接到下(远侧)胶囊部分120。上胶囊部分110和下胶囊部分120一起形成装置的胶囊壳体。胶囊限定内部中空部,该内部中空部容纳有效载荷部分130、保持和向前驱动有效载荷部分130的压头150、以及击发和推进机构,该击发和推进机构包括被构造成击发和向前驱动具有有效载荷的压头以进行药物递送的致动器。有效载荷部分130沿着击发轴线定向并且被构造用于沿着击发轴线移动。在所示的实施方案中,上和下胶囊部分110、120形成围绕击发轴线对称的旋转对称部分。在图1中,装置10被定向成击发轴线竖直指向,并且有效载荷部分130竖直向下指向居中布置在下胶囊部分120中的出口孔124,该出口孔允许有效载荷部分130通过出口孔输送并移动到胶囊装置400之外。下部分120包括组织接合表面123,该组织接合表面被形成为围绕出口孔124的基本上平坦的下外表面。
[0160]
关于用于图9a和图9b所示的实施方案的胶囊部分的合适材料,上部分可以适当地由低密度材料诸如聚己内酯(pcl)制成,而下部分120可以适当地由高密度材料诸如316l不锈钢制成。
[0161]
在所示的实施方案中,由于整个胶囊装置400的密度分布,并且由于装置的外部形
状,胶囊装置400将倾向于将自身定向成击发轴线大致垂直于表面(例如,大致正交于重力的表面、组织的表面,诸如胃肠道壁)。因此,胶囊装置倾向于相对于重力方向定向,使得组织接合表面123竖直面向下。
[0162]
上胶囊110的内部包括套筒形压头引导结构115,其与击发轴线同心地从上胶囊部分110的上部分朝向由形成在下胶囊部分120中的内底部表面限定的压头止动表面128,即朝向面向近侧的止动表面延伸。此外,在所示的实施方案中,第二套筒形结构与击发轴线同心并且在压头引导结构115的径向内侧从上胶囊部分110沿着击发轴线向下延伸。第二套筒形结构用作保持器结构,用于抵抗从布置在胶囊内的张紧驱动弹簧140发出的驱动力(即驱动弹簧用作致动器,以将压头从第一位置向前驱动到第二位置)来保持压头150。在所示的实施方案中,保持器结构具有布置在保持器结构的下端处的径向向内突出的保持器部分113。在所示的实施方案中,保持器部分113被设置为两个相对径向向内突出的弧形突起。
[0163]
在图9a和图9b所示的第四实施方案中,有效载荷部分130限定完全或部分由包括治疗有效载荷的制剂形成的固体递送构件。在所示的实施方案中,固体递送构件被形成为成形为穿透管腔壁的组织的细圆柱杆,该圆柱杆具有组织穿透端和与组织穿透端相对的尾端。杆的组织穿透端是尖的以便于容易插入管腔壁的组织中,而在所示的实施方案中,尾端限定通过90度切割切断的截头圆柱体。适合由胶囊装置400递送的药物的非限制性实例是干燥压缩的api,诸如胰岛素。
[0164]
压头150包括被构造用于将有效载荷部分130的尾端保持在适当位置的上保持部分151和下接口部分155。在所示的实施方案中,接口部分包括向下开口孔,其以一种方式接收有效载荷部分130的尾端,使得有效载荷部分130牢固地附接在孔内。下接口部分155还限定直径略小于压头引导结构115的直径的环形外凸缘。在所示的实施方案中,压头150是可移动的,同时由压头引导结构115引导用于从图9a所示的预击发构型轴向移动到图9b所示的击发构型。
[0165]
关于上述驱动弹簧140,在胶囊装置400中,螺旋压缩弹簧与击发轴线同轴布置。驱动弹簧140的近端抵靠上胶囊部分110的弹簧座安置,即径向地位于压头引导结构115与保持器结构之间。驱动弹簧140的远端抵靠由压头150的下接口部分155限定的凸缘的近侧表面形成的弹簧座安置。作为组装胶囊装置400的一部分,驱动弹簧140已通过在两个弹簧座之间轴向压缩驱动弹簧140被赋能。因此,压头最初承受来自驱动弹簧的负荷,诸如大约10-30n。作为使用压缩弹簧来产生驱动力的替代方案,可以使用其他弹簧构型来为胶囊装置400赋能,诸如扭力弹簧、板簧、恒力弹簧等。在另外的替代方案中,可以使用气体弹簧或气体发生器。
[0166]
压头150的上保持部分151包括以两个可偏转臂152的形式设置的可偏转闩锁,其在远侧方向上从压头的上端朝向出口开口124延伸,每个臂可在径向向内方向上弹性偏转。每个可偏转臂152的端部包括从弹性臂径向向外突出的阻挡部分153。在图1a所示的预击发构型中,每个阻挡部分153的远侧表面接合保持器部分113中对应的一个的近侧表面。由于阻挡部分153最初位于保持器部分113的近侧,因此压头150不能向远侧移动经过保持器部分113,除非可偏转臂152变为在径向向内的方向上充分偏转。
[0167]
在预击发构型中,可溶解丸粒160被布置在两个可偏转臂152之间,使得丸粒160的径向相对表面与两个可偏转臂152的径向面向内支撑表面接合。在所示的实施方案中,丸粒
160被布置在上胶囊部分110内部的隔室中,并且上胶囊部分110中被布置在近侧的上开口有利于当胶囊装置浸没在流体中时流体暴露于可溶解丸粒。在图1a所示的预击发构型中,当可溶解丸粒160呈现不可压缩状态时,丸粒防止两个可偏转臂向内弯曲。然而,在暴露于流体诸如患者胃中存在的胃液时,可溶解丸粒开始溶解。丸粒160被设计成逐渐溶解,使得在预定义的激活时间之后,丸粒已溶解到允许两个可偏转臂152充分向内偏转的程度,从而使压头150的阻挡部分153能够向远侧移动经过保持器部分113。在该条件即击发构型下,压头150已经在驱动弹簧140的负荷下被击发,从而朝向出口孔124向远侧推动压头150。压头150向远侧驱动有效载荷部分130,有效载荷末端最初从胶囊突出,并逐渐压出剩余的有效载荷部分130。当压头150在下胶囊部分120中降至最低点时,有效载荷部分130的向前移动停止。该条件描绘于图1b中。
[0168]
在所示的实施方案中,保持器部分113与阻挡部分153之间的接口倾斜约30
°
,使得可偏转臂将在可溶解丸粒溶解时向内滑动。该角度决定丸粒上的剪切力以及可偏转臂在承受负荷力时倾向于向内滑动的程度。结合击发时压头的加速长度,最佳角度为0
°
,但需要高得多的弹簧力来激活这种构型。对于倾斜部分,在其他实施方案中,可以使用30
°
以外的角度。
[0169]
在所示的实施方案中,图9b示出了压头150和有效载荷部分130可以进入相对于击发轴线稍微倾斜的取向。该效果是通过倾斜机构获得的,所述机构在压头到达其最终目的地时使压头150倾斜。然而,该所示条件在某种程度上是假设的,因为其仅代表胶囊装置被击发到开口中,或者有效载荷部分被击发到流体中。
[0170]
在预期使用的情况下,有效载荷部分130插入管腔壁的组织中,在那里它将大体在沿着击发轴线的方向上锚定。然而,在驱动行程结束时,并且由于压头150的倾斜动作,弯曲扭矩被施加到有效载荷部分130上,从而趋于破坏或以其他方式释放有效载荷130与压头150之间的连接。该效果被引入以使得有效载荷部分130能够与压头150强制分离,从而防止有效载荷部分130在其已被适当地安置在组织内之后从组织收回。
[0171]
在这时,胶囊装置400已递送预期剂量并且将相对于安置在组织壁内的沉积有效载荷部分130释放。随后,胶囊装置的剩余部分将通过使用者的消化系统排出并被处置。
[0172]
如果有效载荷130仍然固定地连接到压头150,并且因此也固定地连接到胶囊装置400的剩余部分,则有效载荷部分将由于胶囊装置相对于目标位置的移动而从组织缩回的可能性将是高的。
[0173]
在所示的实施方案中,通过在压头150的接口部分155的面向远侧的表面上形成偏心布置的突起158来获得压头150在到达最终目的地时的倾斜运动。由于由在下胶囊部分120中形成的内底部表面限定的面向近侧的压头止动表面128是平面的,并且正交于击发轴线定向,因此当压头150与压头止动表面128相遇时获得倾斜效果。如下文将进一步讨论的那样,倾斜效果可以通过多种替代几何设计来获得。此外,尽管在本公开中未描绘,但可以另选地形成压头引导结构115与压头150之间的引导系统以获得类似的倾斜效果。还应当注意,在胶囊装置的其他实施方案中,可以省略倾斜效果。
[0174]
对于上面讨论的可溶解构件,即形成可溶解击发构件的可溶解丸粒160,可以使用不同的形式和组合物。非限制性实例包括注塑异麦芽酮糖醇丸粒、压缩颗粒异麦芽酮糖醇丸粒、由柠檬酸盐/nahco3的颗粒组合物制成的压缩丸粒、或由异麦芽酮糖醇/柠檬酸盐/
nahco3的颗粒组合物制成的压缩丸粒。可溶解丸粒的非限制示例性尺寸是在制造时测量为φ1x3mm的丸粒。
[0175]
在压头150的所示实例中,上保持部分151被形成为腔室,其中可溶解丸粒160被接收在具有紧密配合的腔室内。在所示的实施方案中,胶囊装置400的中心上部分包括用于将胃液引入胶囊内的单个开口。在其他实施方案中,胶囊可以包括其他设计的流体入口开口,诸如围绕胶囊分布的多个开口。在一些设计中,有效载荷部分130容纳在与可溶解丸粒的腔室流体密封的腔室中。此外,出口孔124可以包括密封件,从而防止在击发胶囊装置400之前水分进入有效载荷部分腔室。
[0176]
现在转到图10,示意性地描绘了用于压头和有效载荷部分的三种替代的合适设计,每种设计都获得压头150与有效载荷部分130之间的期望附接并且实现有效载荷部分130从压头150的期望受控脱离。
[0177]
设计编号i包括压头150,其具有从压头150的下接口部分155延伸的中心销156.i。有效载荷部分130相应地形成有被构造用于接收中心销156.i的中心开口。
[0178]
设计编号ii包括压头150,其具有从压头150的下接口部分155延伸的中心锥形突起156.ii。有效载荷部分130相应地形成有被构造用于与锥形突起156.ii配合并接收该锥形突起的中心锥形凹陷。
[0179]
设计编号iii包括压头150,其具有位于压头150的下接口部分155的面向远侧表面处的中心锥形凹陷156.iii。有效载荷部分130相应地形成有被构造用于与锥形突起156.iii配合并接收该锥形突起的中心锥形突起。
[0180]
有效载荷部分130与压头150之间的有效载荷接口部分156的上述四种不同变型仅是示例性的并且可以替代地使用其他构型。有效载荷部分与压头之间的可拆卸附接可以通过使用摩擦配合或压配合来获得。另选地,可以在接口处使用粘合剂,诸如蔗糖。进一步另选地,可以通过最初润湿有效载荷部分并利用压头与有效载荷部分之间的固有静摩擦来获得附接。在使用的情况下,当压头到达其最终目的地时,在有效载荷部分与压头之间的接口处可能发生脱离。在其他实施方案中,可以通过将有效载荷部分的大部分与仍粘附或紧固到压头的剩余有效载荷部分脱离来获得期望的脱离。在一些实施方案中,有效载荷部分包括确定分离点的弱化点。在另外的实施方案中,如下文进一步讨论的那样,压头和有效载荷部分可被形成为全部由包含api的组合物制成的整体部件,并且其中要从胶囊装置推出的预期有效载荷部分与压头部分分离。此外,在另选的实施方案中,有效载荷本身可以用作压头以完全远离胶囊装置输送。
[0181]
图11示意性地示出了将在另外的示例性胶囊装置中使用的一对或两对可偏转闩锁和保持器构型的四种附加设计。显而易见的是,可偏转闩锁元件的数量、可偏转闩锁元件的位置和取向、可溶解击发构件的数量和构型以及压头的设计可以根据本发明的各方面变化,同时仍然获得具有优异作用模式的击发机构。为简单起见,仅示出了压头150的上保持部分151。类似地,仅示出了胶囊部分的保持器结构。
[0182]
在图11中,示出了设计编号i,保持器部分具有向上延伸的保持结构113以与两个可偏转臂152上的阻挡元件协作。在该设计中,可以使用具有如图9a所示的总体结构的压头和可溶解击发构件160。
[0183]
设计编号ii也包括向上延伸的保持结构113,其中压头的大部分被悬挂。在该实施
方案中,压头包括在可偏转臂152的近端上具有阻挡元件的向近侧延伸的可偏转臂,并且其中臂的近端被设计成当位于中心的可溶解击发构件160充分溶解时径向向内挠曲。
[0184]
描绘设计编号iii的图示出了相关构型,但其中压头仅包括单个可偏转臂。在该设计中,不可偏转结构在可溶解击发构件160的一侧布置在背离单个可偏转臂的一侧上。不可偏转结构在其一侧连续地支撑可溶解击发构件160,而相对侧为单个可偏转闩锁臂径向向内移动并经过保持器部分113留出空间。
[0185]
最后,设计编号iv示意性地示出了其中可偏转闩锁和保持器部分已交换位置的实例。在该设计中,压头包括带有保持器部分153'的上保持部分151',所述保持器部分被设计成在致动机构的击发期间不表现出任何挠曲。保持结构(与上胶囊部分或下胶囊部分关联)反而包括呈向远侧延伸的可偏转闩锁臂112'形式的两个可偏转闩锁,每个可偏转闩锁在其最远端处具有阻挡部分153'。每个可偏转臂112’被构造成接合相应的可溶解击发构件160'。所述相应的可溶解击发构件160'因此可以设置为共同的环形构件或设置为围绕击发轴线以环形构型布置的多个独立构件。如上所述,在一些实施方案中,有效载荷本身可以充当压头以与胶囊装置的剩余部分部分或完全断开连接。这种基于api的压头可以包括保持器部分,该保持器部分被设计成在致动机构的击发期间不表现出任何挠曲,其中允许保持器部分经过与胶囊壳体(例如上或下胶囊部分)关联的协作可偏转闩锁。
[0186]
图12示意性地示出了用于获得如上所述的压头150的倾斜效果的三种设计。在设计编号i中,偏心设置的突起158被形成在压头150的接口部分155的面向远侧表面,即面对压头止动表面128的表面上。在设计编号ii中,压头止动表面128上的偏心设置的突起129被定位成在近侧方向上朝向压头150的接口部分155的下表面突出。在如设计iii所示的变型中,压头止动表面128被形成为阶梯表面129',即包括两个或更多个水平,当压头到达压头止动表面128时所述水平引起压头150的倾斜移动。需注意,在到达不同于图12中示意性所示的最终目的地时倾斜压头的其他方式可以通过其他手段实施。
[0187]
参考图13a至13c和图14,接下来将描述根据本发明的方面的药物递送装置的第五实施方案,该第五实施方案被设计成提供具有用于从基于液体的胶囊装置注入液体制剂剂量的期望击发原理的胶囊装置500。本发明所公开的实施方案涉及一种胶囊装置500,其适合于由患者摄取以允许胶囊装置进入胃腔,以相对于胃壁定向,随后部署注射针以在胃壁组织中的目标位置处进行针插入,并最终通过注射针排出液体。类似于第一实施方案至第四实施方案,第五实施方案利用具有低摩擦的胶囊外表面以提供优异的自回正能力。
[0188]
胶囊装置500包括:腔室200c,用于在胃肠道中释放之前(例如,在胃中诸如在胃壁处)保持液体制剂;液体的基于针的递送机构;以及用于致动针插入和后续液体排出的系统。
[0189]
图13a至图13c示出了在击发和执行注射期间处于三种状态的基于液体的胶囊装置中的各个示例性部件。在注射之前,借助于体积为约80μl的腔室200c将液体药物制剂保持在系统内部并加以保护。该腔室200c包括三个共同制成完全密封的内部体积的构件:1)下胶囊220底部部分,2)由有机硅或tpe制成的外部隔膜(例如,塞子)227,3)作为由充当内部隔膜276和外部柱塞密封件277的硬聚合物和软tpe制成的2k模制部件提供的柱塞275。这些隔膜通常能够围绕注射针密封,并且防止食物或液体从外部环境通过。因此,例如,胃中的酶将无法通过隔膜到达药物制剂,并且该制剂不会从隔膜中泄漏。
[0190]
为了将液体药物制剂递送到组织中,注射针230用于辅助递送。针230直接插入穿过内部隔膜276,从而形成紧密配合的密封件。针是中空的(例如,包括通道);然而,液体制剂不穿过针的顶部。相反,注射针230的侧面中存在孔(例如,入口)232。液体被构造成穿过该孔并且从斜面端部(即,在注射针的远端处)流出。例如,在弹簧240激活后,液体腔室200c(例如,储集器)可被放置成与孔232流体连通,因此有利于流体从液体腔室200c传递到针中。孔232位于针上的一定高度,使得孔在激活之前位于液体腔室200c外部,即,如图13a所示。当装置被致动时,在该实例中,针被例如向下移动5mm。如图13b所示,这种移动将针230插入胃组织中,并且将侧孔232移动到液体腔室200c中,从而实现从腔室到组织的流动路径。针的顶端可以闭合,并且用作经由针毂255致动弹簧240的连接点。因此,流体移动通过针230的唯一方式是从侧面的孔232到末端的孔。
[0191]
胶囊装置500在摄入后在胃中自主定向,以便以与第一实施方案至第四实施方案中相同的方式使其注射机构与组织对准。装置的高曲率上部分与其低质心结合确保它仅具有一个稳定取向,该稳定取向被限定为装置的质心处于局部最小值的角度。另外,胶囊装置500的平坦底部稳定其优选构型,并且确保如果患者在致动期间移动,则其不会倾倒并误入管腔中。胶囊装置500的击发机构大体上对应于根据第四实施方案的胶囊装置400的击发机构。
[0192]
胶囊装置500包括可释放的击发机构,该可释放的击发机构结合大体上类似于上述胶囊装置400的可溶解击发构件206。一旦胶囊装置500被摄入,基于水合的致动器塞子(例如,由异麦芽酮糖醇制成)260就开始溶解。塞子借助于两个相对的可偏转臂252将连接到注射针230的毂255保持在适当位置,每个可偏转臂具有接合对应保持器部分213的近侧表面的阻挡部分253。一旦溶解,塞子260释放毂255,并且压缩弹簧240伸展以将针230插入组织中。在设定距离之后,毂255上的止动几何形状254被装置壳体上的凸片214止动(参见图14)。这确保针230以设定距离插入组织中。
[0193]
一旦装置插入针,针毂255立即致动第二压缩弹簧245,该第二压缩弹簧通过柱塞275的移动递送加载的液体制剂。中间驱动部件270被布置在第二压缩弹簧245与柱塞275之间,并且作为针毂255的轴向引导件、作为第二压缩弹簧245的弹簧座271以及作为将力从第二压缩弹簧245传递到柱塞275上的驱动构件提供。当柱塞275接合液体腔室200c的底部表面228时,柱塞275在液体腔室200c中降至最低点。对于所示的实施方案胶囊装置500,通过将针插入与液体注射脱离联接,装置能够在精确组织深度处注射其全部液体剂量,而不是当针移动通过组织时注射剂量。
[0194]
插入组织中的针可以从组织移除,并且经由可缩回机构、溶胀的水凝胶回到装置中,或者它可能丧失其锋利度。第三弹簧可用于使针从其插入状态回到装置中。可溶解针可用于消除针。然而,由于设计目前使用与装置内部的流体接触的针,因此在一些情况下,期望其不从外表面溶解。因此,例如,可包括位于针的外表面上的保护涂层。此类涂层可以是金属诸如金,或者可以是聚合物诸如聚对二甲苯。该层可以在介于300nm至5um厚之间的任何位置处。期望可溶解针在插入组织中之后维持其功能性。例如,它应当能够容易地穿透组织。在一些情况下,它可以使用相对锋利的末端。它还可被构造成使液体通过内部管。另外,它可被构造成在顶部区段上具有孔以允许液体进入。针可由其制得的材料的一些实例包括:糖或类糖材料,诸如异麦芽酮糖醇或蔗糖;可生物降解的聚合物或共聚物,诸如pvp、
pva、soluplus;水凝胶;明胶;淀粉。针可被构造成从内部管溶解到外部。如果针水合并变得柔软,那么这还可以消除从突出针穿孔的可能性。如果针的末端周围有软边界,那么这也可以防止穿孔。如果针变成松软的,就像一片意大利面,那么这也可能起作用。如果针破碎成小块,那么这也可能起作用。针可以由可降解金属制成,使得其会破裂。此类金属包括锌、镁和铁以及其他金属。根据上文结合第四实施方案并且结合图12所述的递送构件分离原理,在第二实施方案中可使用类似机构来分离针。
[0195]
尽管上面关于自回正胶囊的示例性实施方案的描述主要涉及用于在胃中递送的可摄取胶囊,但本发明的自回正原理普遍适用于管腔插入的胶囊装置,其中胶囊装置定位在管腔中,并且其中胶囊装置相对于支撑管腔壁自我定向。胶囊可被构造用于摄取,或通过除口服之外的其他途径插入体腔中。胶囊装置的非限制性实例可以包括用于将药物经肠递送至肠腔的组织壁中的胶囊装置。可以使用诸如针的递送构件经由插入管腔的组织壁中的微针来进行药物递送。作为使用专用递送构件的替代,可以使用直接击发到管腔壁中的胶囊装置,诸如通过胶囊装置的一个或多个出口开口执行而无需使用递送构件。此类装置的示例性实施方案包括通过喷射作用递送一种或多种药物的胶囊装置,其中通过使颗粒抵靠管腔壁加速而将颗粒引入组织壁中。
[0196]
另选地,或结合药物递送,本发明的自回正原理普遍适用于管腔插入的胶囊装置,其中一个或多个诊断操作由胶囊装置提供,实例包括结合感测装置诸如测量物理参数的传感器,或利用图像感测的感测装置。此外,一个或多个锚定机构的使用可与自回正胶囊装置结合,使得一旦自回正胶囊已相对于管腔壁进入期望取向,锚定机构就被部署用于在长时间内维持所呈现的取向。
[0197]
在示例性实施方案的以上描述中,在本领域技术人员将清楚本发明的概念的程度上描述了为不同部件提供所述功能的不同结构和装置。不同部件的详细构造和说明被认为是由本领域技术人员按照本说明书中所陈述的路线执行的正常设计过程的目的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。