1.本实用新型涉及水稻种子筛选技术领域,具体涉及一种基于机器视觉的杂草稻种子精选装置。
背景技术:
2.随着农业的不断发展,农业生产作业由传统的人工模式转换为现在的机械模式。比如传统的水稻种植为培育秧苗,然后进行人工插秧或者采用插秧机进行插秧。但是随着农业种植人员的流失,使得水稻种植更多的采用直播的方式种植。
3.直播稻虽然种植简单且适合大规模种植,但直播稻对种子的要求也越来越高。由于直播稻是将稻种直接播种到水田中,整个过程中并没有移栽环节,因此无法对秧苗进行二次筛选。但是一般水稻种子中会掺杂杂草稻种子,杂草稻也叫“杂草型稻”或“稻的杂草种系”,是稻田中一种不种自生、没有经济价值的稻,因此水稻种子中掺杂的杂草稻种子影响水稻的产量。
4.传统技术中的筛选机大都只能筛出坏种、秕种等,无法从稻种里筛选出杂草稻种子。如果将杂草稻种子连同稻种一起直接播种到田地中,则直接导致水稻的产量降低。因此,如何实现在直播稻种中筛选出杂草稻种子是本领域亟待解决的技术问题。
技术实现要素:
5.本实用新型为了解决上述技术问题,提出了如下技术方案:
6.第一方面,本实用新型实施例提供了一种基于机器视觉的杂草稻种子精选装置,包括:机架,设置在机架上的种子输送机构和图像采集装置,所述图像采集装置的图像采集端朝向所述种子输送机构的种子输送面,所述机架上相邻所述图像采集装置还设置有剔除装置,所述剔除装置固定设置在所述机架上,所述种子输送机构、图像采集装置和剔除装置均与控制器电连接。
7.采用上述实现方式,通过种子输送机构对水稻种子进行输送,在输送过程中通过图像采集装置采集水稻种子的图像信息并发送给控制器,控制器确定出水稻种子中的杂草稻种子后,控制剔除装置将杂草稻种子剔除。剔除杂草稻种子后的水稻种子进行直播种植时,由于播种的水稻种子是通过精选后水稻种子,从而可以提高水稻的产量。
8.结合第一方面,在第一方面第一种可能的实现方式中,所述种子输送机构包括传送带和设置在所述传送带一端的第一电机,所述第一电机设置有第一电机驱动器,所述第一电机驱动器与所述控制器电连接。第一电机作为传送带的驱动电机,传动带一般设置有一个传动轮和多个从动轮,第一电机的转动输出轴与传动轮固定连接。控制器通过第一电机驱动器控制第一电机的工作,带动传送带运动对水稻种子进行输送。
9.结合第一方面第一种可能的实现方式,在第一方面第二种可能的实现方式中,所述图像采集装置包括光罩和相机,所述光罩固定设置在所述机架上,对应所述光罩的传送带罩设在所述光罩下面;所述光罩内侧设置有单射光源,所述相机设置在所述光罩内侧顶
部,所述相机的拍摄端与所述传送带的传输面垂直,所述相机与所述控制器电连接。当待筛选的水稻种子通过传送带输送到光罩内时,控制器控制传送带停止工作,开始图像的采集。光罩内置单射光源使得相机所获得的图像不受外界光的影响,设置在光罩内侧顶部的相机具有无线传输功能,采集的图像信息实时发送给控制器。
10.结合第一方面第二种可能的实现方式,在第一方面第三种可能的实现方式中,所述剔除装置设在在所述光罩的第一端一侧,所述光罩的第二端对应设置有排种机构;所述剔除装置包括伸缩杆和吸管,所述伸缩杆一端固定设置在所述机架上,另一端固定设置所述吸管,所述吸管设置方向与所述传送带的传输面垂直。设置在光罩第二端侧的排种机构用于排出水稻种子到到传送带上,输送至图像采集装置,从图像采集装置输出后通过剔除装置将杂草稻种子剔除。具体地,通过伸缩杆控制吸管将杂草稻种子吸走,完成剔除工作。
11.结合第一方面第三种可能的实现方式,在第一方面第四种可能的实现方式中,对应所述伸缩杆设置有第二电机和第二电机驱动器,所述吸管设置在伸缩杆上的位置设置有吸取装置,所述第二电机驱动器和所述吸取装置均与所述控制器电连接。控制器通过第二电机驱动器控制第二电机工作实现伸缩杆的伸长或缩短,设置在伸缩杆上的吸取装置产生一定的吸力,通过吸管将杂草稻种子吸走剔除。
12.结合第一方面第四种可能的实现方式,在第一方面第五种可能的实现方式中,所述吸取装置包括腔体,所述腔体固定设置在所述伸缩杆上,所述腔体设置有进气口和出气口,所述腔体内设置有滤网、风机和步进电机,所述滤网设置在靠近所述进气口的位置,所述步进电机的转动输出轴与所述风机的转轴固定连接。进气口与滤网之间的空间为集种器,用于存储暂时吸取的杂草种子。设置在滤网一侧的步进电机带动风机转动形成单向气流,从进气口吸气,从出气口排出。设置滤网一方面组织了杂草稻种子的通过,还可以避免其他杂质进入到风机中。进气口设置在腔体的边缘位置,这样可以使得吸进的杂草稻种子从吸入后落到另一侧,实现集种器内暂时存储,避免杂草稻种子从吸气口回落。
13.结合第一方面第三种可能的实现方式,在第一方面第六种可能的实现方式中,所述排种机构包括种箱和导种板,所述种箱固定设置在所述机架上,所述导种板的一端设置在所述种箱的种子排出口位置,另一端靠近所述传送带。种箱内的水稻种子从种子排出口排出后,沿着导种板输送到传送带上,采用排种板可以提高水稻种子落到传送带上的稳定性,降低了种子洒落的风险。
14.结合第一方面第六种可能的实现方式,在第一方面第七种可能的实现方式中,所述种箱内设置有排种器,对应所述排种器设置有第三电机,所述第三电机的转动输出轴与所述排种器的转轴固定连接;对应所述第三电机设置有第三电机驱动器,所述第三电机驱动器与所述控制器电连接。控制器通过第三电机驱动器控制第三电机工作,第三电机工作带动排种器工作。排种器在第三电机的带动下将种箱中的种子通过导种板将水稻种子撒在传送带上,完成撒种。
15.第二方面,本实用新型实施例提供了一种基于机器视觉的杂草稻种子精选方法,采用第一方面或第一方面任一可能实现方式所述的基于机器视觉的杂草稻种子精选装置,所述方法包括:当水稻种子通过种子输送机构输送到图像采集装置中时,控制器控制种子输送装置停止;图像采集装置通过图像采集端对水稻种子进行采集并发送给控制器处理;控制器处理发送来的图像后确定出输送的水稻种子中的杂草稻种子并确定其位置;杂草稻
种子确定完毕后,控制种子输送机构运行,当到达剔除装置工作范围时再次控制种子输送装置停止;控制器控制剔除装置将确定出的杂草稻种子进行剔除。
16.结合第二方面,在第二方面第一种可能的实现方式中,所述控制器处理发送来的图像后确定出输送的水稻种子中的杂草稻种子并确定其位置,包括:将水稻种子的图像转换成灰度值在0-255之间的灰度图像;采用高斯滤波法降低图像在采集过程中受到各种噪声源的干扰,同时保护图像边缘信息;通过形态学运算将图像变得平滑,再利用canny边缘检测算子对滤波后的待测物图像进行边缘检测,得到待测物边缘图像;采用最小外接矩阵算法来获取最小外界矩阵的宽和高,从而获取水稻种子的长和宽;采用contouratea算法来检测水稻种子轮廓的面积;采用rectangle算法来检测水稻种子轮廓的周长;提取每一粒水稻种子r、g、b三通道的平均值,检测每粒水稻种子的最小外接矩阵的位置;通过r通过所占总像素的比例,识别杂草稻种子,并输出杂草稻种子的中心位置。
附图说明
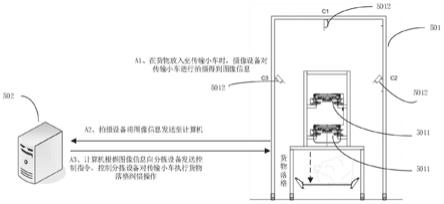
17.图1为本实用新型实施例提供的一种基于机器视觉的杂草稻种子精选装置的结构示意图;
18.图2为本实用新型实施例提供的吸取装置的结构示意图;
19.图3为本实用新型实施例提供的排种机构的结构示意图;
20.图4为本实用新型实施例提供的一种基于机器视觉的杂草稻种子精选方法的流程示意图;
21.1-机架,2-控制器,3-传送带,4-第一电机,5-第一电机驱动器,6-光罩,7-相机,8-伸缩杆,9-吸管,10-第二电机,11-第二电机驱动器,12-腔体,13-进气口,14-出气口,15-滤网,16-风机,17-步进电机,18-种箱,19-导种板,20-排种器,21-第三电机,22-第三电机驱动器。
具体实施方式
22.下面结合附图与具体实施方式对本方案进行阐述。
23.图1为本实用新型实施例提供的一种基于机器视觉的杂草稻种子精选装置的结构示意图,参见图1,本实用新型实施例提供的基于机器视觉的杂草稻种子精选装置,包括:机架1,设置在机架1上的种子输送机构和图像采集装置,所述图像采集装置的图像采集端朝向所述种子输送机构的种子输送面,所述机架1上相邻所述图像采集装置还设置有剔除装置,所述剔除装置固定设置在所述机架1上,所述种子输送机构、图像采集装置和剔除装置均与控制器2电连接。
24.进一步地,所述种子输送机构包括传送带3和设置在所述传送带3一端的第一电机4,所述第一电机4设置有第一电机驱动器5,所述第一电机驱动器5与所述控制器2电连接。第一电机4作为传送带3的驱动电机,传动带一般设置有一个传动轮和多个从动轮,第一电机4的转动输出轴与传动轮固定连接。控制器2通过第一电机驱动器5控制第一电机4的工作,带动传送带3运动对水稻种子进行输送。
25.所述图像采集装置包括光罩6和相机7,所述光罩6固定设置在所述机架1上,对应所述光罩6的传送带3罩设在所述光罩6下面;所述光罩6内侧设置有单射光源,所述相机7设
置在所述光罩6内侧顶部,所述相机7的拍摄端与所述传送带3的传输面垂直,所述相机7与所述控制器2电连接。当待筛选的水稻种子通过传送带3输送到光罩6内时,控制器2控制传送带3停止工作,开始图像的采集。光罩6内置单射光源使得相机7所获得的图像不受外界光的影响,设置在光罩6内侧顶部的相机7具有无线传输功能,采集的图像信息实时发送给控制器2。
26.所述剔除装置设在在所述光罩6的第一端一侧,所述光罩6的第二端对应设置有排种机构;所述剔除装置包括伸缩杆8和吸管9,所述伸缩杆8一端固定设置在所述机架1上,另一端固定设置所述吸管9,所述吸管9设置方向与所述传送带3的传输面垂直。设置在光罩6第二端侧的排种机构用于排出水稻种子到到传送带3上,输送至图像采集装置,从图像采集装置输出后通过剔除装置将杂草稻种子剔除。具体地,通过伸缩杆8控制吸管9将杂草稻种子吸走,完成剔除工作。
27.对应所述伸缩杆8设置有第二电机10和第二电机驱动器11,所述吸管9设置在伸缩杆8上的位置设置有吸取装置,所述第二电机驱动器11和所述吸取装置均与所述控制器2电连接。控制器2通过第二电机驱动器11控制第二电机10工作实现伸缩杆8的伸长或缩短,设置在伸缩杆8上的吸取装置产生一定的吸力,通过吸管9将杂草稻种子吸走剔除。
28.参见图2,所述吸取装置包括腔体12,所述腔体12固定设置在所述伸缩杆8上,所述腔体12设置有进气口13和出气口14,所述腔体12内设置有滤网15、风机16和步进电机17,所述滤网15设置在靠近所述进气口13的位置,所述步进电机17的转动输出轴与所述风机16的转轴固定连接。
29.进气口13与滤网15之间的空间为集种器,用于存储暂时吸取的杂草种子。设置在滤网15一侧的步进电机17带动风机16转动形成单向气流,从进气口13吸气,从出气口14排出。设置滤网15一方面组织了杂草稻种子的通过,还可以避免其他杂质进入到风机16中。进气口13设置在腔体12的边缘位置,这样可以使得吸进的杂草稻种子从吸入后落到另一侧,实现集种器内暂时存储,避免杂草稻种子从吸气口回落。
30.参见图3,所述排种机构包括种箱18和导种板19,所述种箱18固定设置在所述机架1上,所述导种板19的一端设置在所述种箱18的种子排出口位置,另一端靠近所述传送带3。种箱18内的水稻种子从种子排出口排出后,沿着导种板19输送到传送带3上,采用排种板可以提高水稻种子落到传送带3上的稳定性,降低了种子洒落的风险。
31.进一步地,所述种箱18内设置有排种器20,对应所述排种器20设置有第三电机21,所述第三电机21的转动输出轴与所述排种器20的转轴固定连接;对应所述第三电机21设置有第三电机驱动器22,所述第三电机驱动器22与所述控制器2电连接。控制器2通过第三电机驱动器22控制第三电机21工作,第三电机21工作带动排种器20工作。排种器20在第三电机21的带动下将种箱18中的种子通过导种板19将水稻种子撒在传送带3上,完成撒种。
32.由上述实施例可知,排种机构将水稻种子输送种子输送机构的传送带3上,通过传送带3对水稻种子进行输送,在输送过程中通过图像采集装置采集水稻种子的图像信息并发送给控制器2,控制器2确定出水稻种子中的杂草稻种子后,控制剔除装置将杂草稻种子剔除。剔除杂草稻种子后的水稻种子进行直播种植时,由于播种的水稻种子是通过精选后水稻种子,从而可以提高水稻的产量。
33.需要指出的是,本实施例提供的基于机器视觉的杂草稻种子精选装置,对控制器
中识别参数进行改进后,可以实现对其他农作物种子的精选,在此不再赘述。
34.与上述实施例提供的一种基于机器视觉的杂草稻种子精选装置相对应,本实用新型还提供了一种基于机器视觉的杂草稻种子精选方法的是实施例。参见图4,基于机器视觉的杂草稻种子精选方法包括:
35.s101,当水稻种子通过种子输送机构输送到图像采集装置中时,控制器控制种子输送装置停止。
36.将待精选水稻种子放到所述种箱中,控制控制第三电机工作,经传动轴带动排种器工作,水稻种子经过导种板落入到传送带上。与此同时,控制器控制第一电机工作,带动传送带转动,直至传送带前进至设定位置,第一电机停止工作。
37.s102,图像采集装置通过图像采集端对水稻种子进行采集并发送给控制器处理。
38.控制控制传送带停止的同时,也控制第三电机停止工作,排种箱停止排种作业。控制器开始控制光照内的单身光源打开,然后通过相机对光照下的水稻种子进行图形采集。
39.s103,控制器处理发送来的图像后确定出输送的水稻种子中的杂草稻种子并确定其位置。
40.本实施例中的控制器可以为pc计算机,计算机内搭载图像处理系统,使用pycharm 软件并搭载opencv开源计算机视觉库对采集的图像进行处理。计算机通过内置无线传输功能与相机无线相连,相机采集的水稻种子图像传送至计算机。
41.具体地,确定杂草稻种子的过程为:
42.s1031,将水稻种子的图像转换成灰度值在0-255之间的灰度图像。
43.s1032,采用高斯滤波法降低图像在采集过程中受到各种噪声源的干扰,同时保护图像边缘信息。
44.s1033,通过形态学运算将图像变得平滑,再利用canny边缘检测算子对滤波后的待测物图像进行边缘检测,得到待测物边缘图像。
45.s1034,采用最小外接矩阵算法来获取最小外界矩阵的宽和高,从而获取水稻种子的长和宽。
46.s1035,采用contouratea算法来检测水稻种子轮廓的面积;采用rectangle算法来检测水稻种子轮廓的周长。
47.s1036,提取每一粒水稻种子r、g、b三通道的平均值,检测每粒水稻种子的最小外接矩阵的位置。
48.s1037,通过r通过所占总像素的比例,识别杂草稻种子,并输出杂草稻种子的中心位置。
49.s104,杂草稻种子确定完毕后,控制种子输送机构运行,当到达剔除装置工作范围时再次控制种子输送装置停止。
50.通过s103将覆盖在光罩下的水稻种子中的杂草稻种子位置确定完毕后,控制第一电机以低速启动,带动传送带再次转动。低速的目的是防止速度太快打乱了水稻种子原始分布。当杂草稻种子从光罩中输送出,进入到剔除装置工作范围时,控制第一电机停止,传送带停止转动。
51.s105,控制器控制剔除装置将确定出的杂草稻种子进行剔除。
52.控制器通过s104中确定出的杂草稻种子位置,控制第二电机工作,带动伸缩装置
将吸管到达杂草稻种子的位置。然后控制步进电机带动风机转动,产生吸力,通过吸管将杂草稻种子剔除。
53.需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
54.当然,上述说明也并不仅限于上述举例,本实用新型未经描述的技术特征可以通过或采用现有技术实现,在此不再赘述;以上实施例及附图仅用于说明本实用新型的技术方案并非是对本实用新型的限制,如来替代,本实用新型仅结合并参照优选的实施方式进行了详细说明,本领域的普通技术人员应当理解,本技术领域的普通技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换都不脱离本实用新型的宗旨,也应属于本实用新型的权利要求保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。