1.本发明涉及一种智能料场集中管控系统及方法,涉及矿山、冶金、码头、电厂的散货料场和库场料场装卸搬运设备的智能化管控,属于物流仓储技术领域。
背景技术:
2.目前,矿山、冶金、码头、电厂的原料供给和成品存储的散货料场占地广,设备繁多且分散,种类多且量大,物料的运入运出随机性大。散货料场是与企业原材料供给、成品存储关联大的环节,且是周期性重复、劳动强度大和条件恶劣的作业环境,对散货料场的堆/取料等库场设备实现无人化、智能化管控,对提高料场的作业效率和利用率、降低劳动强度、减少人员配置具有重要意义,为矿山、冶金、码头、电厂的智能化建设奠定基础。
技术实现要素:
3.本发明目的是提供一种智能料场集中管控系统及方法,针对煤炭、矿石等散货料场,利用无人机悬停方式携挂激光扫描仪,替代传统的安装于堆/取料设备悬臂上随机移动的方式;用控制算法建立料场作业经验流程和策略评估,对料场及料堆作业状况做推断预测;对料场设备做健康管控,建立料场设备生命周期分析和料场作业习惯信息模型;达到无人操作的自主搬运和智能化管控,解决背景技术中的上述问题。
4.本发明的技术方案是:一种智能料场集中管控方法,包含如下步骤:
①
在数据库规划中对料场按地理位置做区域划分,对料场内的所有设备进行区域规划的编号,对料场内设备做主从设置,各设备间做互换率折算,对料场的堆/取料作业在设备上做主从备份,用马尔可夫决策过程算法建立料场作业经验流程,对料场内各设备间的自主运行做策略控制,并对料场内出现的行人和障碍物做避障处理;
②
利用无人机悬停方式携挂对料堆作业面进行实时扫描的激光扫描仪,替代料场传统的安装于堆/取料设备悬臂上随机移动的方式;
③
在设备上加装振动传感器、温度传感器和液压油润滑油清浊度检测传感器,(按传感器使用说明书要求安装在能可靠地检测到设备的振动、温度和油清浊度参数的位置),对电气机械设备运行状态的信息进行采集、分析和诊断,把设备的运行调整、保养和维修决策延伸到设备应用上,对料场设备做健康管理;
④
利用料场空闲时间,对料堆做规整,根据料堆状况和作业经验流程,将堆/取料设备提前移动到料堆处作取料准备,或提前移动到空场地处作卸料准备,为取料、卸料和混配料节省设备的移动时间;
⑤
根据激光三维扫描取得的料场和料堆的实时数据,对堆/取料设备的位置及其大车、输送带、悬臂俯仰/回转角度实时检测和精确定位,在堆/取料或按比例的混配作业中,对料场及料堆采用变结构动态贝叶斯自适应推理算法做策略评估和推断,在上位机做智能化管控,达到无人操作的自动搬运和智能化管理;
⑥
料场各设备及料堆作业状况等数据全部存入智能料场集中管控系统的经验数据库,建立设备生命周期分析和料场作业数据库,为后续作业提供模型预测和参数索引,也可按时间顺序调用查看设备作业和料堆存储状况。
5.所述料场各设备及料堆作业状况等数据全部存入智能料场集中管控系统的经验数据库中,即可按时间调用查看,又可为下次同类型的作业提供经验数据。
6.所述在数据库规划中对料场按地理位置做区域划分,对料场内的所有设备进行区域规划的编号,根据设备的健康状况做主从设置,即健康设备且作业完毕位于该区域的设备为该区域的主设备,亚健康或临近维修期或相邻区域的设备为该区域的从设备。
7.所述各设备间做互换率折算,将料场内各设备状况根据能否互相通用替代进行互换率折算;所述相互通用替代,包括作业路径、功率和占地体积,折算成互换率;如果设备a和b相同,则互换率为1,为简略、涵盖范围广泛和提高互换性,将互换率按0.8或1.2、0.5或1.5二种规格折算。
8.堆/取料作业发生时,先运行编号为主的设备,作业前进行规划,若主设备运力不够,直接投入从设备;当料场发生临时堆/取料任务或堆/取料设备发生故障,立即将从设备或互换率相近的设备投入运行;所述互换率相近的设备投入运行,先从互换率为0.8或1.2且距作业点距离最短的从设备群里调入,距离最短为优先级最高,其次为互换率为0.5或1.5且距离远的从设备。
9.通过智能料场集中管控系统的设备健康管理模块,把设备状态信息的采集、分析、诊断、趋势预测与寿命评估以及运行的调整、保养、维修决策延伸到设备应用上(如,设备临近维修期或处于亚健康状态,在运行中限制其重载和超载或长时间连续运行),对料场设备做健康管理和可靠性评估,有效监控设备工况的变异、早期检出防御自愈能力的衰减、损伤量变和退化的程度,根据料场工期适时进行预测维护和调整,使其恢复健康,防止故障生成,避免非计划停机,改变传统料场缺乏设备监测、依赖经验和“不病不看”的现状,从事后维修转向预测维修和主动维修,为维修列出优先顺序并做计划,提高设备健康监控水平和维修保养的效率及质量;对料堆出现状态不定、体积不确定的塌方式流堆时,做出相应的设备作业决策,并通过现时激光扫描的信息对料堆隐藏变动的状态进行评估,预估料堆的变化趋势,操控设备以料堆为梯形的最优模式作业,防止填埋和瞬间重负荷损坏堆/取料设备。
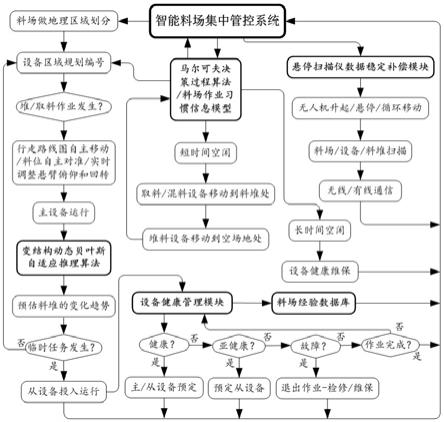
10.一种智能料场集中管控系统,包括上位机监管软件、数据库、下位监测仪器、无人机携挂三维激光扫描仪、振动传感器、温度传感器、液压油润滑油清浊度检测传感器和电机电压电流传感器,实现料场智能化集中管控;所述的上位机监管软件,包含:料场作业习惯信息模型、变结构动态贝叶斯自适应推理算法、无人机悬停扫描仪数据稳定补偿模块、马尔可夫决策过程算法、设备健康管理模块;所述数据库包含料场经验数据库;所述无人机携挂三维激光扫描仪在料场上方悬停,上位机监管软件和数据库交叉运行,参与料场监管,达到散货料场的无人化、智能化运营。
11.无人机携带激光扫描仪悬停定点定位对料堆和料场内设备作业状况进行实时扫描,使激光扫描仪对料场存料状况、堆/取料作业状态进行实时扫描监控,使料位、出入料、设备运行状况实时传输到上位控制器,调整其空间悬停位置或循环移动,达到无死角的扫描监控,将无人机本体固有的摄像设备的视频信号用于现场视频监管。若料场容量面积大,
需要监管运行的料堆或设备多,配置多台无人机携带相关仪器设备升空悬停到料场的多个位置,提供多点位的扫描数据,满足监控需求;若需无人机长时间升空悬停,可使无人机携带电源电缆和通信电缆与地面设备链接升空悬停,解决无人机电池供电和无线通信易受干扰的缺陷;无人机携带照明灯具或其它仪器升空,为料场提供照明或其它监控管理功能。
12.在料场的机械设备的旋转部件和承载重的部件上加装振动传感器、温度传感器和液压油润滑油清浊度检测传感器,(按传感器使用说明书要求安装在能可靠地检测到设备的振动、温度和油清浊度参数的位置),监测机械设备旋转部件的运行状态,对难以触及或成本过高的地方采用无线变送器传递信号;对料场的电气设备采集运行的电压、电流和温度数据;通过设备健康管理模块对上述数据分析、诊断、趋势预测与寿命评估,将运行调整、保养、维修决策延伸到机械设备和电气设备应用上,对料场的机械设备和电气设备做健康管理和可靠性评估,有效监控设备工况的变异、早期检出防御自愈能力的衰减、损伤量变和退化的程度,根据料场工期适时进行预测维护和调整,使其恢复健康,防止故障生成,避免非计划停机,从事后维修转向预测维修和主动维修,为维修列出优先顺序并做计划,提高机械设备和电气设备健康监控水平和维修保养的效率及质量。
13.本发明的有益效果:利用无人机悬停方式携挂激光扫描仪,替代传统的安装于堆/取料设备悬臂上随机移动的方式;用控制算法建立料场作业经验流程和策略评估,对料场及料堆作业状况做推断预测;对料场设备做健康管控,建立料场设备生命周期分析和料场作业习惯信息模型;达到无人操作的自主搬运和智能化管控。本发明填补了现代料场管控的技术空白,简便易行,有效地提高了料场的运行效率、设备管控维保、无人化智能化监管水平。
附图说明
14.图1是本发明实施例流程示意图;图2是本发明实施例一系统示意图;图3是本发明实施例一俯视示意图;图4是本发明实施例二系统示意图;图5是本发明实施例二俯视系统示意图;图中:1-无人机携挂的激光扫描仪;2-无人机携挂的其它检测仪器(如:摄像机、测距仪、照明灯具等);3-堆取料设备的物料输送部分安装的振动传感器;4-堆取料设备的物料输送部分安装的温度传感器;5-堆取料设备的物料输送部分安装的液压油和润滑油清浊度的检测仪器;6-堆取料设备行走部分安装的振动传感器;7-堆取料设备行走部分安装的温度传感器;8-堆取料设备行走部分安装的液压油和润滑油清浊度的检测仪器;9-无人机通过携挂电缆连接的供电电源;10-无人机通过携挂电缆连接的通信用交换机;11-堆取料设备行走部分安装的避障超声波传感器;12-堆取料设备回转部分安装的避障超声波传感器;13-堆取料设备回转部分安装的避障超声波传感器。
具体实施方式
15.以下结合附图,通过实施例对本发明做进一步说明。
16.在实施例一中,参照附图2、3。
17.无人机上携挂激光扫描仪1和其它检测仪器2(如:摄像机、测距仪、照明灯具等);在堆取料设备的物料输送部分安装振动传感器3、温度传感器4、液压油和润滑油清浊度检测仪器5;在堆取料设备行走部分安装振动传感器6、温度传感器、液压油和润滑油清浊度检测仪器7;堆取料设备行走部分安装避障超声波传感器11,堆取料设备回转部分安装避障超声波传感器12;堆取料设备回转部分安装避障超声波传感器13。适用于无人机段石墨在空中悬停,无人机使用自身携带的电池供电,并通过自身通讯设备与地面进行无线联络。
18.在实施例二中,参照附图2、3,无人机通过携挂电缆连接地面的供电电源8和通信用交换机9;其余与实施例一相同。需无人机长时间升空悬停时,可使无人机携带电源电缆和通信电缆与地面设备链接升空悬停(以目前小型无人机升空20米悬停的带载能力完全胜任),解决无人机电池供电和无线通信易受干扰的缺陷。
19.一种智能料场集中管控方法,具体步骤如下:在数据库规划中对料场按地理位置做区域划分,对料场内的所有设备进行区域规划的编号,根据设备的健康状况做主从设置,即健康设备且作业完毕位于该区域的设备为该区域的主设备,亚健康或临近维修期或相邻区域的设备为该区域的从设备。将料场内各设备状况(能否互相通用替代,包括作业路径、功率、占地体积等,折算成互换率,假如设备a和b相同,则互换率为1,为简略、涵盖范围广泛和提高互换性,将互换率按0.8或1.2、0.5或1.5二种规格折算。)堆/取料作业发生时,先运行编号为主的设备(作业前的规划,若主设备运力不够,直接投入从设备),当料场发生临时堆/取料任务或堆/取料设备发生故障,管控系统立即将从设备或互换率相近的设备(先从互换率为0.8或1.2且距作业点距离最短的从设备群里调入,距离最短为优先级最高。其次是互换率为0.5或1.5且距离远的从设备)投入运行。根据预置的工艺参数,用马尔可夫决策过程mdp(markov decision process)算法,建立料场内设备群间自主运行的料场作业经验流程,通过无线或有线通信,对料场的装卸搬运和堆/取料设备按预存设备行走路线图自主移动、取/卸料位自主对准、实时根据料堆高度自主调整大车移动和悬臂的俯仰/回转角度、自主运行数据实时上传,达到恒流堆/取料作业。
20.根据激光扫描仪数据和运行设备上加装的超声波传感器对料场内出现的行人和障碍物做避障处理:当激光扫描数据监测到出现移动物体或超声波遇障碍物遮挡,在距离堆/取料设备一定距离时发出预警信号、现场设备发出语音警示,达到极限距离时设备停止作业并报警,警示信号消失后,需人工干预重启作业流程。使料场的搬运和堆/取料作业达到无人智能化管控。
21.利用无人机升空悬停方式,携带挂载对料堆作业面进行实时扫描的激光扫描仪,替代料场传统的安装于堆/取料设备悬臂(如斗轮机和堆/取料机的悬臂或输送机桁架)上的方式。由于堆/取料设备在作业时其本体需不断行走移动、其上输送设备也需不断运行,造成其悬臂和桁架也会不断振动,尤其悬臂和桁架的头部振动更大,这使得传统悬挂方式的激光扫描仪需要不断地完成去抖动、变换坐标系等大量运算弥补,以期调整对料堆作业面的准确扫描,这就加大了扫描仪和上位机的工作量,往往造成扫描数据不准确和延迟,使得该项工作不仅浪费大量计算机算力还会要求计算机硬件配置大大提升,且由于设备本体的移动、设备上输送部分的振动往往造成共振,波及悬挂的扫描仪器,成为制约其实际应用的瓶颈。
22.无人机的悬停技术非常成熟,即使遇到恶劣天气也能满足悬挂激光扫描仪的稳定要求(为使无人机悬挂方式具有对生产扫描仪多厂家型号、性能的广谱适应性,智能料场集中管控系统内置无人机悬停扫描仪数据稳定补偿模块,对扫描仪数据实时补偿还原。)无人机携带激光扫描仪悬停不仅能定点定位对料堆和料场内设备作业状况进行实时扫描,使激光扫描装置以更广谱的视角对料场存料状况、堆/取料作业状态进行实时扫描监控,使料位、出入料、设备运行等状况实时传输到上位控制器,还能根据需求调整其空间悬停位置或循环移动,达到无死角的扫描监控,并可将无人机本体固有的摄像设备的视频信号用于现场视频监管。若料场容量面积大,需要监管运行的料堆或设备多,还可配置多台无人机携带相关仪器设备升空悬停到料场的多个位置,提供多点位的扫描数据,满足监控需求(小型料场约拥有5台以下的堆/取料设备,易采用3台无人机携带激光扫描等监测仪器,对拥有8台以上堆/取料设备的大中型料场可采用多台无人机携带监控仪器做监控。启用的多台无人机虽多为悬停模式,也由智能料场集中管控系统做协同控制,防止碰撞。)若需无人机长时间升空悬停,可使无人机携带电源电缆和通信电缆与地面设备链接升空悬停(以目前小型无人机升空20米悬停的带载能力完全胜任),解决无人机电池供电和无线通信易受干扰的缺陷。无人机也可携带照明灯具或其它仪器升空,为料场提供照明和其它功用。
23.在机械设备关键部件(视料场设备需求定,如:各设备的旋转部件、承载重的部件。)上加装振动传感器、温度传感器和液压油润滑油清浊度检测传感器,监测机械设备的轴承、齿轮和其他旋转部件的运行状态(对难以触及或成本过高的地方采用无线变送器传递信号),对电气设备采集其运行的电压、电流和温度数据(设备运行状况和载荷状况),通过智能料场集中管控系统的设备健康管理模块,把设备状态信息的采集、分析、诊断、趋势预测与寿命评估以及运行的调整、保养、维修决策延伸到设备应用上(如,设备临近维修期或处于亚健康状态,在运行中限制其重载和超载或长时间连续运行),对料场设备做健康管理和可靠性评估,有效监控设备工况的变异、早期检出防御自愈能力的衰减、损伤量变和退化的程度,根据料场工期适时进行预测维护和调整,使其恢复健康,防止故障生成,避免非计划停机,改变传统料场缺乏设备监测、依赖经验和“不病不看”的现状,从事后维修转向预测维修和主动维修,为维修列出优先顺序并做计划,提高设备健康监控水平和维修保养的效率及质量。
24.针对料场受行业经济和物流运输的影响,在不同的季节或每天的运行中,都会出现料场运行的空闲时间。对长期空闲(一天以上),智能料场集中管控系统对料场设备做健康维保;对短时间的空闲(1小时以上),智能料场集中管控系统操控设备对料堆做标准堆形规整,并根据料场内料堆存储状况结合料场作业习惯信息模型,对场内设备做配置,将堆/取料设备提前移动到料堆处(准备取料)或空闲场地处(准备卸料)为取料、卸料和混配料节省设备的移动时间,提高料场的运行效率。
25.根据激光扫描仪取得的实时数据,结合料堆材质、安息角、临界角等参数,对料场及料堆采用变结构动态贝叶斯自适应推理算法vsdb(variable structure dynamic bayesian adaptive reasoning algorithm)做策略评估和推断,根据料堆的状况(料堆材质、料堆角度、宽度、高度)和堆/取料工艺需求(用户需求、物料类型、物料数量),确定堆/取料位置、方式、堆/取速度,对堆/取料设备的位置及其大车、输送带、悬臂俯仰/回转角度等实时检测、定位和移动作业,并由智能料场集中管控系统通过激光三维扫描计算出的实时
堆/取料数量、该料堆的剩余量或堆放量、剩余作业时间、料场内同样物料的数量等数据实时监管和评估;对料堆出现状态不定、体积不确定的塌方式流堆时,做出相应的设备作业决策,并通过激光扫描的信息对料堆隐藏变动的状态进行评估,预估料堆的变化趋势,操控设备以料堆为梯形的最优模式作业,防止填埋和瞬间重负荷损坏堆/取料设备。
26.在实施例中,一种智能料场集中管控系统,各设备在作业期间,根据各激光扫描仪数据和运行设备上加装的超声波传感器对料场内出现的行人和障碍物做避障处理:当激光扫描数据监测到出现移动物体或超声波遇障碍物遮挡(各设备间的防撞亦同),在距离堆/取料设备一定距离时发出预警信号、现场设备发出语音警示,达到极限距离时设备停止作业并报警,警示信号消失后,需人工干预重启作业流程。使料场的搬运和堆/取料作业达到无人智能化管控。
27.对上述的料场各设备作业及料堆状况等数据,建立设备生命周期分析和料场作业习惯信息模型,全部存入智能料场集中管控系统的料场经验数据库中,为后续作业提供模型预测和参数索引数据,也可按时间调用查看设备作业和料堆存储状况。随着作业的增多、时间的推移,智能料场集中管控系统对该料场的经验数据库会愈来愈丰富,为后期的管理、作业提供更加完善的经验数据样本。
28.所述的智能料场集中管控系统,内置“料场作业习惯信息模型”、“变结构动态贝叶斯自适应推理算法”、“无人机悬停扫描仪数据稳定补偿模块”、“马尔可夫决策过程算法”、“设备健康管理模块”、“料场经验数据库”监控软件模块、无人机携挂扫描仪等仪器悬停方式、在机械设备关键部件(视料场设备需求定,如:各设备的旋转部件、承载重的部件。)处加装的振动传感器、温度传感器和对电气设备电压电流等参数的监测方法,各软件模块、数据库等都是同时交叉运行参与“智能料场集中管控系统”监管的。达到对码头和库场等散货料场的无人化、智能化运营。
29.通过智能料场集中管控系统的设备健康管理模块,把设备状态信息的采集、分析、诊断、趋势预测与寿命评估以及运行的调整、保养、维修决策延伸到设备应用上(如,设备临近维修期或处于亚健康状态,在运行中限制其重载和超载或长时间连续运行),对料场设备做健康管理和可靠性评估,有效监控设备工况的变异、早期检出防御自愈能力的衰减、损伤量变和退化的程度,根据料场工期适时进行预测维护和调整,使其恢复健康,防止故障生成,避免非计划停机,改变传统料场缺乏设备监测、依赖经验和“不病不看”的现状,从事后维修转向预测维修和主动维修,为维修列出优先顺序并做计划,提高设备健康监控水平和维修保养的效率及质量。对料堆出现状态不定、体积不确定的塌方式流堆时,做出相应的设备作业决策,并通过激光扫描的信息对料堆隐藏变动的状态进行评估,预估料堆的变化趋势,操控设备以料堆为梯形的最优模式作业,防止填埋和瞬间重负荷损坏堆/取料设备。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。