1.本实用新型涉及体育赛事视频录制技术领域,特别涉及一种篮球比赛自动生成运动员点位图的视频拍摄装置。
背景技术:
2.目前,现有的篮球比赛中运动员的平面位置示意图(点位图)大多采用人工绘制,比赛结束后,由专业人员观看比赛视频,并将赛事视频中各个运动员的位置相应地绘制到点位图中,采用人工绘制运动员的点位图,费时费力,效率较低,一些软件虽然能将绘制轨迹的工作变得较为容易,但这些软件需要赛后使用,无法在比赛视频拍摄录制的同时生成点位图。
技术实现要素:
3.本实用新型的主要目的是提出一种篮球比赛自动生成运动员点位图的视频拍摄装置,旨在在拍摄和记录篮球比赛视频的同时,生成运动员的平面位置示意图(点位图),用于赛中或赛后战术分析和规划。
4.为实现上述目的,本实用新型提出的篮球比赛自动生成运动员点位图的视频拍摄装置,包括摄像机本体、支撑杆以及三脚架,所述支撑杆的上端部与所述摄像机本体的下端壁可拆卸固定连接,所述支撑杆的下端部与所述三脚架的上端部可上下滑动和左右转动连接,所述摄像机本体的前端部设有一广角摄像头和麦克风,所述摄像机本体的上端部设有一取景器目镜,所述摄像机本体内设有主控芯片以及分别与所述主控芯片电连接的cmos图像传感器和图像信号处理单元。
5.进一步地,所述支撑杆的上端部设有一螺纹孔,所述摄像机本体的下端壁凸设有一螺杆,所述螺杆可拆卸的旋于所述螺纹孔内设置。
6.进一步地,还包括紧固螺钉,所述三脚架的上端部设有一安装套筒,所述支撑杆的下端部可上下滑动和左右转动地嵌设于所述安装套筒内设置,所述紧固螺钉分别旋于所述安装套筒的上端部的外周壁上,且所述紧固螺钉的前端部分别可与所述支撑杆的外周壁抵接设置。
7.进一步地,所述摄像机本体的上端部设有一把手。
8.进一步地,所述广角摄像头的分辨率为2k或4k。
9.进一步地,所述主控芯片采用nxp的asc8850微处理器芯片,
10.进一步地,所述cmos图像传感器采用sony的icx445cmos图像传感器。
11.采用本实用新型的技术方案,具有以下有益效果:本实用新型的技术方案,通过标定的广角摄像头的参数矩阵,以及篮球场的二值分割图的边角信息,计算出当前画面与篮球场平面图的单应性矩阵,通过该单应性矩阵对图像进行单应性变换或透视变换,完成将运动员位置映射到篮球场的平面图上,将生成的点位图融合进原视频图像中输出,从而实现在拍摄和记录篮球比赛视频图像的同时显示各个运动员位置,能够实时自动生成双方比
赛运动员的在篮球场的平面位置的点位图,便于赛中或赛后进行战术分析和规划,大大提高了点位图绘制的效率和智能化程度。
附图说明
12.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
13.图1为本实用新型提出的一种篮球比赛自动生成运动员点位图的方法的整体流程步骤图;
14.图2为本实用新型提出的一种篮球比赛自动生成运动员点位图的方法的篮球场的边界检测和图像的二值分割的步骤流程图;
15.图3为本实用新型提出的一种篮球比赛自动生成运动员点位图的方法的 encoder和decoder的架构图;
16.图4为本实用新型提出的一种篮球比赛自动生成运动员点位图的方法的检测和球员追踪的流程示意图;
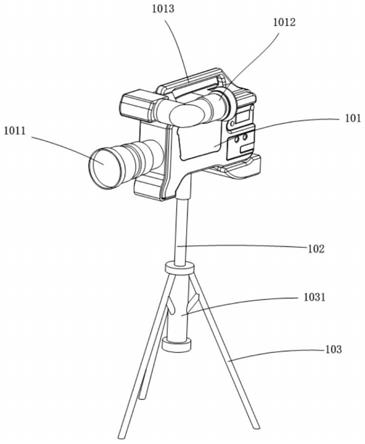
17.图5为本实用新型提出的一种篮球比赛自动生成运动员点位图的视频拍摄装置的整体结构图;
18.图6为本实用新型提出的一种篮球比赛自动生成运动员点位图的视频拍摄装置的另一视角的整体结构图。
19.本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
22.另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
23.本实用新型提出一种篮球比赛自动生成运动员点位图的视频拍摄装置。
24.如图5和图6所示,本实用新型提出的一种篮球比赛自动生成运动员点位图的视频拍摄装置,包括摄像机本体101、支撑杆102以及三脚架103,所述支撑杆102的上端部与所述摄像机本体101的下端壁可拆卸固定连接,所述支撑杆102的下端部与所述三脚架103的上端部可上下滑动和左右转动连接,所述摄像机本体101的前端部设有一广角摄像头1011和麦克风(未图示),所述摄像机本体101的上端部设有一取景器目镜1012,所述摄像机本体
101 内设有主控芯片(未图示)以及分别与所述主控芯片电连接的cmos图像传感器(未图示)和图像信号处理单元(未图示)。
25.可选地,所述支撑杆102的上端部设有一螺纹孔,所述摄像机本体101 的下端壁凸设有一螺杆,所述螺杆可拆卸的旋于所述螺纹孔内设置。
26.可选地,还包括紧固螺钉(未图示),所述三脚架103的上端部设有一安装套筒1031,所述支撑杆102的下端部可上下滑动和左右转动地嵌设于所述安装套筒1031内设置,所述紧固螺钉分别旋于所述安装套筒1031的上端部的外周壁上,且所述紧固螺钉的前端部分别可与所述支撑杆102的外周壁抵接设置。
27.可选地,所述摄像机本体101的上端部设有一把手1013。
28.可选地,所述广角摄像头1011的分辨率为2k或4k。
29.可选地,所述主控芯片采用nxp的asc8850微处理器芯片,所述cmos 图像传感器采用sony的icx445cmos图像传感器。
30.如图1至图4所示,本实用新型还提出一种篮球比赛自动生成运动员点位图的方法,包括如下步骤:
31.s1:选择广角摄像头的位置,通过所述广角摄像头拍摄篮球比赛的全场画面;
32.s2:广角摄像头的标定和画面的畸变矫正,通过改参数矩阵对广角摄像头图像进行畸变校正;
33.s3:篮球场边界检测和图像分割,通过编码-解码模型,完成篮球场的边界检测和图像的二值分割,流程步骤图如图2所示,encoder和decoder的架构如图3所示;
34.s4:运动员检测和运动员追踪,通过多目标检测和跟踪模型生成人员追踪信息,并通过过滤器,结合篮球场的边界检测和图像的二值化分割信息,判断出在场上的运动员并实时追踪,比赛双方运动员队伍和裁判通过颜色滤镜进行分辨,流程步骤如图4所示;
35.s5:运动员位置映射,通过标定的广角摄像头的参数矩阵,以及篮球场的二值分割图的边角信息,计算出当前画面与篮球场平面图的单应性矩阵,通过该单应性矩阵对图像进行单应性变换或透视变换,完成将运动员位置映射到篮球场的平面图上;
36.s6:自动生成带有点位图的视频图像,将步骤s5中生成的点位图融合进原视频图像中输出,视频图像中显示各个运动员位置,各个运动员的点位图位置由步骤s4中在场运动员追踪的边框中线最低点决定。
37.可选地,步骤s2中通过改参数矩阵对广角摄像头图像进行畸变校正的具体方法如下:
38.步骤s2.1:广角摄像头在不同位置、不同角度以及不同姿态下,对印刷有黑白棋格的标定板拍摄10~20张标定图像;
39.步骤s2.2:在每一张标定图像上提取各个角的顶点位置信息,角点检测器采用harris或shi-tomasi;
40.步骤s2.3:通过优化迭代算出平移向量和旋转向量;
41.步骤s2.4:计算广角摄像头的参数矩阵kk;
42.步骤s2.5:利用求得的参数矩阵kk,对图像进行几何变换,从而完成广角摄像头图像的畸变矫正。
43.其中,校准后图像的像素位置xp和yp,与校准前图像的像素位置xd(1) 和xd(2)之
间的关系为:
[0044][0045]
kk为相机参数矩阵,用过该矩阵和上述公式,可以对畸变图像上个点作出相应的位置变换,从而校正图像。kk相机参数矩阵中可参数的描述如下:
[0046][0047]
其中,
[0048]
fc(1)和fc(2)是以像素为单位的相机各方向的焦距;
[0049]
cc(1)和cc(2)是以像素为单位的相机主点坐标;
[0050]
alpha_c是偏斜系数;
[0051]
kc则是图像的畸变参数,包含径向畸变和切向畸变;
[0052]
以上参数均由相机参数计算的步骤求出。
[0053]
可选地,步骤s4中,所述过滤器的工作方法具体如下:
[0054]
步骤s4.1:根据人员检测和最终提供的方框,计算方框底部中点的坐标位置;
[0055]
步骤s4.2:根据二值化分割信息,判断上一步方框中点位置是否在白色区域内;
[0056]
步骤s4.3:如果中点位置在白色区域内,保留方框;反之,丢弃方框。
[0057]
可选地,步骤s5中,单应性矩阵的求解和变换方法具体如下:
[0058]
步骤s5.1:根据视频中球场二值分割图像的角点信息,得到4个角点的坐标x(i)和y(i),其中i=1~4;
[0059]
步骤s5.2:篮球场的高宽比是固定值,根据高宽比设置4个角点的坐标, x^(i)和y^(i),其中i=i=1~4,数值大小与第一步中的数字约在同个量级;
[0060]
步骤s5.3:两组坐标满足以下关系:
[0061][0062]
代入各点坐标展开得到:
[0063]
[0064]
步骤s5.4:将h
33
设为1,并通过最小二乘估计(least squares estimation) 求解,得到单应性矩阵h;
[0065]
步骤s5.5:通过h矩阵,对各个球员视频坐标x2和y2信息作出变换生成点位坐标x1和y1,转换公式如下:
[0066][0067]
具体地,本实用新型通过标定的广角摄像头的参数矩阵,以及篮球场的二值分割图的边角信息,计算出当前画面与篮球场平面图的单应性矩阵,通过该单应性矩阵对图像进行单应性变换或透视变换,完成将运动员位置映射到篮球场的平面图上,将生成的点位图融合进原视频图像中输出,从而实现在拍摄和记录篮球比赛视频图像的同时显示各个运动员位置,能够实时自动生成双方比赛运动员的在篮球场的平面位置的点位图,便于赛中或赛后进行战术分析和规划,大大提高了点位图绘制的效率和智能化程度。
[0068]
以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的实用新型构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。