一种智能跟随车辆的无人机照明灯
1.技术领域
2.本发明涉及一种智能跟随车辆的无人机照明灯,特别是涉及智能跟随车辆的无人机照明灯,属于汽车技术领域。
背景技术:
3.现今随着汽车对人们生活带来的便利性,几乎家家都会选择汽车出行,由于汽车的普及性很高,在很多场合都会用到。特别的,在夜晚行驶时,一般情况下路边都会有路灯,传统车载的前置车灯结合路灯使得在夜晚出行更方便,其次也降低了夜晚行驶的危险。但对于一些欠发达的地区还没有修建路灯或者难以修建路灯,这时在夜晚出行时,即使打开了车辆自带的车灯,由于车速高以及前方视线不清晰等原因,使得驾车风险升高,以至于让驾驶员精神紧绷的状态开车。
4.根据现有的gps、无人机等技术,结合上述所遇到的问题,在市面上应该推出一款可以代替路灯的车载照明灯,以使得即使在夜晚出行依旧安全。
技术实现要素:
5.本发明的主要目的是为了解决夜晚驾车时在没有路灯的情况下,推出一款可以替代路灯的车载照明灯而提供一种智能跟随车辆的无人机照明灯。
6.本发明的目的可以通过采用如下技术方案达到:包括汽车100,所述汽车100的内部分别设置有室内智能操控触摸板101和第一电池102,所述汽车100的顶面分别设置有滑动防护盖200和降落板300,所述滑动防护盖200的内部两侧均设置有凹槽201,所述滑动防护盖200的内部一边固定连接有推拉条208,所述推拉条208上设置有若干个均匀分布的齿条209,所述推拉条208的一端一侧设置有第一限位条210;所述降落板300的内部设置有第一控制面板307,所述降落板300的顶面分别设置有第一无线充电接口308和第一固定磁条309,所述第一固定磁条309的两侧均设置有识别校准标记盘310,所述第一控制面板307分别与所述室内智能操控触摸板101、所述第一电池102和所述第一无线充电接口308电连接;所述降落板300上设置有无人机400。
7.优选的,所述滑动防护盖200的一端两侧均设置有转轴202,所述转轴202上活动连接有闭合门204,所述滑动防护盖200的一端两侧均设置有l形双头弹簧203,所述l形双头弹簧203的一端固定在所述滑动防护盖200上,所述l形双头弹簧203的另一端固定在所述闭合门204上,所述闭合门204上均设置有槽口205,所述槽口205与所述推拉条208配合使用,所述闭合门204的内侧设置有第一磁铁206,所述滑动防护盖200上设置有第二磁铁207,所述第二磁铁207与两个所述第一磁铁206配合使用。
8.优选的,所述降落板300的两侧均设置有凹条301,所述凹条301与所述凹槽201配合使用,所述降落板300的内部设置有推拉条槽302,所述推拉条槽302与所述推拉条208配
合使用,所述推拉条槽302一端从外向内分别固定连接有滑动滚条303和第二限位条304,所述滑动滚条303与所述推拉条208配合使用,所述第二限位条304与所述第一限位条210配合使用,所述降落板300的一侧固定连接有马达305,所述马达305上活动连接有转动齿轮306,所述转动齿轮306与所述推拉条208上的所述齿条209配合使用,所述马达305与所述第一控制面板307电连接。
9.优选的,所述无人机400主要包括主体机身401和若干个均匀分布的旋翼402,所述主体机身401的一侧和底面分别设置有第一识别板403和第二识别板407,所述第一识别板403和所述第二识别板407上均设置有视屏摄象头404、雷达传感器405和激光测距器406,所述主体机身401上设置有空槽408,所述空槽408上设置有支撑杆409,所述支撑杆409上设置有支撑板410,所述支撑板410上分别设置有第一照明灯411和第二照明灯412,所述主体机身401的底面分别设置有第二固定磁条413和第二无线充电接口414,所述第二固定磁条413与所述第一固定磁条309配合使用,所述第二无线充电接口414与所述第一无线充电接口308配合使用,所述主体机身401的内部设置有内部空槽415,所述内部空槽415内分别设置有第二电池416和第二控制面板417,所述第二控制面板417分别与所述第二电池416、所述第一识别板403、所述第二识别板407、所述第一照明灯411、所述第二照明灯412、所述第二无线充电接口414和所述旋翼402电连接,所述第二识别板407与所述识别校准标记盘310配合使用。
10.优选的,所述第一控制面板307与所述第二控制面板417配合使用,所述无人机400可通过所述室内智能操控触摸板101进行操控,所述第一控制面板307和所述第二控制面板417内均设置有蓝牙、gps等芯片。
11.优选的,所述第一照明灯411和所述第二照明灯412之间有夹角,所述第一照明灯411和所述第二照明灯412均采用led远射灯。
12.与现有技术相比,本发明的有益效果是:1)、本发明使汽车100结合于无人机400和第一照明灯411、第二照明灯412,依据室内智能操控触摸板101进行操控,这样即使在夜黑无路灯照明的情况下,驾驶人依旧拥有良好的照明系统以供安全驾驶。
13.2)、本发明设计的滑动防护盖200可以防护其内的无人机400免受风雨的侵害,滑动防护盖200于马达305配合使用,当需要升起无人机400时,只需要通过室内智能操控触摸板101操作,就可以使得滑动防护盖200滑开,继而可以使得无人机400起飞。
14.3)、本发明设计的降落板300不仅可以起降无人机400,而且可以为无人机400进行充电,通过第二无线充电接口414与第一无线充电接口308的配合使用,负责无人机400的电能补充。
15.4)、本发明设计的无人机400根据常规的gps、各类无人识别系统等可以很好的跟踪汽车100,无论是在有障碍物或者汽车100速度变化的情况都可以稳定的在汽车100的前方完成照明的工作;无人机400上第二识别板407与识别校准标记盘310配合使用,方便无人机400返回到降落板300上,第一照明灯411和第二照明灯412可以对夜路中的前方照明提供良好的安全视线,方便驾驶人安全通过复杂的路况。
附图说明
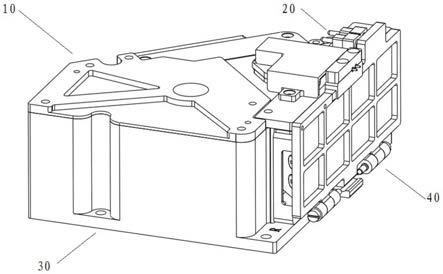
16.图1为按照本发明的智能跟随车辆的无人机照明灯的一优选实施例为汽车立体图;图2为按照本发明的智能跟随车辆的无人机照明灯的一优选实施例为汽车立体透视图;图3为按照本发明的智能跟随车辆的无人机照明灯的一优选实施例为滑动防护盖立体图;图4为按照本发明的智能跟随车辆的无人机照明灯的一优选实施例为推拉条立体透视图;图5为按照本发明的智能跟随车辆的无人机照明灯的一优选实施例为降落板立体透视图;图6为按照本发明的智能跟随车辆的无人机照明灯的一优选实施例为降落板立体图;图7为按照本发明的智能跟随车辆的无人机照明灯的一优选实施例为无人机飞行图;图8为按照本发明的智能跟随车辆的无人机照明灯的一优选实施例为无人机立体图;图9为按照本发明的智能跟随车辆的无人机照明灯的一优选实施例为无人机局部立体图;图10为按照本发明的智能跟随车辆的无人机照明灯的一优选实施例为无人机局部立体透视图。
17.图中:100、汽车;101、室内智能操控触摸板;102、第一电池;200、滑动防护盖;201、凹槽;202、转轴;203、l形回力弹簧;204、闭合门;205、槽口;206、第一磁铁;207、第二磁铁;208、推拉条;209、齿条;210、第一限位条;300、降落板;301、凹条;302、推拉条槽;303、滑动滚条;304、第二限位条;305、马达;306、转动齿轮;307、第一控制面板;308、第一无线充电接口;309、第一固定磁条;310、识别校准标记盘;400、无人机;401、主体机身;402、旋翼;403、第一识别板;404、视屏摄象头;405、雷达传感器;406、激光测距器;407、第二识别板;408、空槽;409、支撑杆;410、支撑板;411、第一照明灯;412、第二照明灯;413、第二固定磁条;414、第二无线充电接口;415、内部空槽;416、第二电池;417、第二控制面板。
具体实施方式
18.为使本领域技术人员更加清楚和明确本发明的技术方案,下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
19.如图1-图10所示,本实施例提供的一种智能跟随车辆的无人机照明灯使汽车100结合于无人机400和第一照明灯411、第二照明灯412,依据室内智能操控触摸板101进行操控,这样即使在夜黑无路灯照明的情况下,驾驶人依旧拥有良好的照明系统以供安全驾驶。
20.包括汽车100,汽车100的内部分别设置有室内智能操控触摸板101和第一电池102,汽车100的顶面分别设置有滑动防护盖200和降落板300,滑动防护盖200的内部两侧均设置有凹槽201,滑动防护盖200的内部一边固定连接有推拉条208,推拉条208上设置有若
干个均匀分布的齿条209,推拉条208的一端一侧设置有第一限位条210;降落板300的内部设置有第一控制面板307,降落板300的顶面分别设置有第一无线充电接口308和第一固定磁条309,第一固定磁条309的两侧均设置有识别校准标记盘310,第一控制面板307分别与室内智能操控触摸板101、第一电池102和第一无线充电接口308电连接;降落板300上设置有无人机400。
21.滑动防护盖200的一端两侧均设置有转轴202,转轴202上活动连接有闭合门204,滑动防护盖200的一端两侧均设置有l形双头弹簧203,l形双头弹簧203的一端固定在滑动防护盖200上,l形双头弹簧203的另一端固定在闭合门204上,闭合门204上均设置有槽口205,槽口205与推拉条208配合使用,闭合门204的内侧设置有第一磁铁206,滑动防护盖200上设置有第二磁铁207,第二磁铁207与两个第一磁铁206配合使用。降落板300的两侧均设置有凹条301,凹条301与凹槽201配合使用,降落板300的内部设置有推拉条槽302,推拉条槽302与推拉条208配合使用,推拉条槽302一端从外向内分别固定连接有滑动滚条303和第二限位条304,滑动滚条303与推拉条208配合使用,第二限位条304与第一限位条210配合使用,降落板300的一侧固定连接有马达305,马达305上活动连接有转动齿轮306,转动齿轮306与推拉条208上的齿条209配合使用,马达305与第一控制面板307电连接。无人机400主要包括主体机身401和四个个均匀分布的旋翼402,主体机身401的一侧和底面分别设置有第一识别板403和第二识别板407,第一识别板403和第二识别板407上均设置有视屏摄象头404、雷达传感器405和激光测距器406,主体机身401上设置有空槽408,空槽408上设置有支撑杆409,支撑杆409上设置有支撑板410,支撑板410上分别设置有第一照明灯411和第二照明灯412,主体机身401的底面分别设置有第二固定磁条413和第二无线充电接口414,第二固定磁条413与第一固定磁条309配合使用,第二无线充电接口414与第一无线充电接口308配合使用,主体机身401的内部设置有内部空槽415,内部空槽415内分别设置有第二电池416和第二控制面板417,第二控制面板417分别与第二电池416、第一识别板403、第二识别板407、第一照明灯411、第二照明灯412、第二无线充电接口414和旋翼402电连接,第二识别板407与识别校准标记盘310配合使用。第一控制面板307与第二控制面板417配合使用,无人机400可通过室内智能操控触摸板101进行操控,第一控制面板307和第二控制面板417内均设置有蓝牙、gps等芯片。第一照明灯411和第二照明灯412之间有夹角,第一照明灯411和第二照明灯412均采用led远射灯。
22.在本实施例中,如图1、图2、图3和图4所示,本发明设计的滑动防护盖200可以防护其内的无人机400免受风雨的侵害,滑动防护盖200于马达305配合使用,当需要升起无人机400时,只需要通过室内智能操控触摸板101操作,就可以使得滑动防护盖200滑开,继而可以使得无人机400起飞。
23.滑动防护盖200的一端两侧均设置有转轴202,转轴202上活动连接有闭合门204,滑动防护盖200的一端两侧均设置有l形双头弹簧203,l形双头弹簧203的一端固定在滑动防护盖200上,l形双头弹簧203的另一端固定在闭合门204上,闭合门204上均设置有槽口205,槽口205与推拉条208配合使用,闭合门204的内侧设置有第一磁铁206,滑动防护盖200上设置有第二磁铁207,第二磁铁207与两个第一磁铁206配合使用。
24.在本实施例中,如图5、图6所示,本发明设计的降落板300不仅可以起降无人机400,而且可以为无人机400进行充电,通过第二无线充电接口414与第一无线充电接口308
的配合使用,负责无人机400的电能补充。
25.降落板300的两侧均设置有凹条301,凹条301与凹槽201配合使用,降落板300的内部设置有推拉条槽302,推拉条槽302与推拉条208配合使用,推拉条槽302一端从外向内分别固定连接有滑动滚条303和第二限位条304,滑动滚条303与推拉条208配合使用,第二限位条304与第一限位条210配合使用,降落板300的一侧固定连接有马达305,马达305上活动连接有转动齿轮306,转动齿轮306与推拉条208上的齿条209配合使用,马达305与第一控制面板307电连接。
26.在本实施例中,如图7、图8、图9和图10所示,本发明设计的无人机400根据常规的gps、各类无人识别系统等可以很好的跟踪汽车100,无论是在有障碍物或者汽车100速度变化的情况都可以稳定的在汽车100的前方完成照明的工作;无人机400上第二识别板407与识别校准标记盘310配合使用,方便无人机400返回到降落板300上,第一照明灯411和第二照明灯412可以对夜路中的前方照明提供良好的安全视线,方便驾驶人安全通过复杂的路况。
27.无人机400主要包括主体机身401和四个个均匀分布的旋翼402,主体机身401的一侧和底面分别设置有第一识别板403和第二识别板407,第一识别板403和第二识别板407上均设置有视屏摄象头404、雷达传感器405和激光测距器406,主体机身401上设置有空槽408,空槽408上设置有支撑杆409,支撑杆409上设置有支撑板410,支撑板410上分别设置有第一照明灯411和第二照明灯412,主体机身401的底面分别设置有第二固定磁条413和第二无线充电接口414,第二固定磁条413与第一固定磁条309配合使用,第二无线充电接口414与第一无线充电接口308配合使用,主体机身401的内部设置有内部空槽415,内部空槽415内分别设置有第二电池416和第二控制面板417,第二控制面板417分别与第二电池416、第一识别板403、第二识别板407、第一照明灯411、第二照明灯412、第二无线充电接口414和旋翼402电连接,第二识别板407与识别校准标记盘310配合使用。
28.在本实施例中,如图1-图10所示,本实施例提供的智能跟随车辆的无人机照明灯的原理如下:通过室内智能操控触摸板101的操控,可以使得马达305转动继而使得滑动防护盖200打开,继续操作启动无人机400后,旋翼402开始运行,相继的第二固定磁条413与第一固定磁条309分离,第二无线充电接口414与第一无线充电接口308分离,根据第一识别板403和第二识别板407上的部件进行导航和定位,使无人机400在汽车100的前方并且打开第一照明灯411和第二照明灯412,方便驾驶人安全驾驶;使用完毕后,操作室内智能操控触摸板101即可召回无人机400,无人机400根据第二识别板407上的部件与识别校准标记盘310配合使用,待无人机400降落后,第二固定磁条413与第一固定磁条309相吸并固定无人机400,第二无线充电接口414与第一无线充电接口308相吸并为无人机400进行充电,继续操作可关闭滑动防护盖200,使得无人机400安全防止。
29.综上所述,在本实施例中,按照本实施例的智能跟随车辆的无人机照明灯。
30.以上所述,仅为本发明进一步的实施例,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明所公开的范围内,根据本发明的技术方案及其构思加以等同替换或改变,都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。