1.本发明涉及图像处理技术领域,尤其涉及一种人工智能图像处理装置。
背景技术:
2.仿生机器人”是指模仿生物、从事生物特点工作的机器人;仿生机器人可以在不同环境下执行工作或者任务,具有广阔的开发前景;目前市场的仿生机器人虽然通过眼睛中设置的摄像头来获取图像,但是摄像头基本都是固定的,或者是单个控制的;这样就导致了仿生机器人获取图像的局限性,以及操作仿生机器人时的真实性。
3.现在中国专利申请号cn202110223353.8公开了一种人工智能图像处理装置中通过转动组件中的电动机可以带动转板转动,以便于通过转板的旋转作用带动摄像机旋转,便于完成360度全景的图像拍摄取材,以便于更好地展示三维立体环境,同时转板还利用钢珠在底板的滚动滑动作用,对自身进行转动支撑,使得旋转更加平稳,有利于提高图像获取的画面质量;
4.上述公开文件中,电动机带动转板转动,从而使得转板上的摄像机旋转,只能在同一水平内进行360度旋转取景,不能对摄像头进行多维度的摆动,从而导致图像获取的局限性。
技术实现要素:
5.本发明的目是针对背景技术中存在的问题,提出一种可以模仿人类眼睛进行多维度转动获取图像信息,使得图像获取效果更好的人工智能图像处理装置。
6.本发明的技术方案:一种人工智能图像处理装置,包括固定组件、仿生眼球、传动组件和连接组件;
7.固定组件上设有支撑架和两组支撑板,两组仿生眼球分别转动设置在支撑架上;支撑架呈眼镜架状,且两组支撑板分别与两组仿生眼球对应设置;固定组件上设有用于调节仿生眼球方向的调节组件a;其中,调节组件a包括气缸、活动板、导向杆、固定板a、固定板b、调节组件b、齿轮和电机a;两组导向杆设置在固定组件上并位于支撑板远离支撑架的一侧,气缸设置在固定组件上并位于两组导向杆之间,活动板滑动设置在导向杆上并与气缸的伸缩轴连接;固定板b通过三组固定板a设置在活动板上,调节组件b滑动设置在固定板b上,且调节组件b底部设有齿条;电机a设置在位于中间的固定板a上,且电机a的转动轴穿过固定板a;齿轮设置在电机a的转动轴上并与齿条啮合传动连接;传动组件设置在支撑板上,两组连接组件对称设置在传动组件上,且传动组件两端通过连接组件分别与调节组件b和仿生眼球连接。
8.优选的,传动组件包括滚珠和固定套;滚珠转动设置在支撑板上,两组固定套设置在滚珠上并分别位于支撑板的两侧,且固定套上设有滑动连接的伸缩杆。
9.优选的,连接组件包括固定件a、连接块a和连接块b;连接块a转动设置在固定件a上,且连接块a另一端设有固定件b;连接块b转动设置在固定件b上并与伸缩杆连接。
10.优选的,仿生眼球包括摄像头固定件、透明保护盖和摄像头;摄像头固定件转动设置在支撑架上并与固定件a连接,且摄像头固定件上设有安装槽;摄像头设置在摄像头固定件上并位于安装槽内,透明保护盖与摄像头固定件螺纹连接并盖住摄像头。
11.优选的,调节组件b包括导轨、滑块、双向螺纹杆和电机b;滑块滑动设置在导轨并与固定块a连接,双向螺纹杆转动设置在导轨上并与滑块螺纹连接;电机b设置在导轨上,且电机b的转动轴与双向螺纹杆连接。
12.优选的,固定组件包括固定平板和四个设有沉头孔的固定块。
13.优选的,传动组件与连接组件为可拆卸连接。
14.优选的,支撑板包括主体板a、主体板b、安装孔a和安装孔b;主体板a和主体板b上设有弧形安装槽,且在主体板a和主体板b相互靠近的一侧形成安装孔a,在主体板a和主体板b相互远离的一侧形成安装孔b;安装孔a的直径大于安装孔b的直径。
15.本发明还提出用于人工智能图像处理装置的使用方法,包括以下步骤:
16.s1、先通过固定组件上的四组设有沉头孔的固定块将固定平板安装在仿生机器人的头部;
17.s2、当机器人需要两组仿生眼球同时左右观察时,启动固定板a上的电机a来带动齿轮转动,设置在调节组件b底部的齿条驱动调节组件b在固定板b上滑动;然后固定件b通过连接块a在固定件a上转动,伸缩杆跟随连接块b移动并在固定套上滑出,同时带动滚珠在支撑板上转动;相同的,仿生眼球通过连接组件在固定套和伸缩杆的配合下在支撑架上转动,从而通过摄像头采集图像信息;
18.s3、当机器人需要两组仿生眼球同时上下观察时;启动气缸推动活动板沿着导向杆设置的方向移动,固定板b通过固定板a跟随活动板移动;此时固定套和伸缩杆通过连接块b在固定件b上转动,从而带动滚珠在支撑板上转动;相同的,仿生眼球通过连接组件在固定套和伸缩杆的配合下在支撑架上转动,从而通过摄像头采集图像信息;
19.s4、当机器人需要两组仿生眼球同时向相同或者相反方向观察时,将气缸和电机a关闭,电机b启动并带动双向螺纹杆转动,此时滑块移动并带动两组固定件a往相同或者相反的相反移动,然后固定件b通过连接块a在固定件a上转动,伸缩杆跟随连接块b移动并在固定套上滑出,同时带动滚珠在支撑板上转动;相同的,仿生眼球通过连接组件在固定套和伸缩杆的配合下在支撑架上转动,从而通过摄像头采集图像信息;
20.s5、通过无线传输或者有线传输将信息传输给接收端即可。
21.与现有技术相比,本发明具有如下有益的技术效果:在操作本发明时,通过固定板a上的电机a来带动齿轮转动,此时设置在调节组件b底部的齿条驱动调节组件b在固定板b上滑动,固定件b通过连接块a在固定件a上转动,伸缩杆跟随连接块b移动并在固定套上滑出,同时带动滚珠在支撑板上转动;仿生眼球通过连接组件在固定套和伸缩杆的配合下在支撑架上转动,从而通过摄像头水平移动采集图像信息。通过气缸推动活动板沿着导向杆设置的方向移动,固定板b通过固定板a跟随活动板移动;此时固定套和伸缩杆通过连接块b在固定件b上转动,从而带动滚珠在支撑板上转动;仿生眼球通过连接组件在固定套和伸缩杆的配合下在支撑架上转动,从而通过摄像头垂直移动采集图像信息。电机a和气缸同时工作来带动摄像头进行多维度移动采集图像信息。另一方面通过将气缸和电机a关闭,电机b启动并带动双向螺纹杆转动,此时滑块移动并带动两组固定件a往相同或者相反的相反移
动,然后固定件b通过连接块a在固定件a上转动,伸缩杆跟随连接块b移动并在固定套上滑出,同时带动滚珠在支撑板上转动;仿生眼球通过连接组件在固定套和伸缩杆的配合下在支撑架上转动,从而使得两组仿生眼球向不同水平方向转动并通过摄像头采集图像信息;本发明可以模仿人类眼睛进行多维度转动来获取图像信息,使得图像获取效果更好。
附图说明
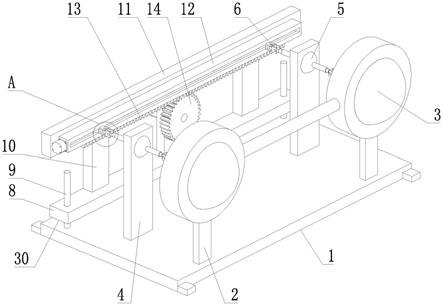
22.图1为本发明一种实施例结构示意图;
23.图2为图1的后视图;
24.图3为图1的a处局部放大结构示意图;
25.图4为图1中传动组件的结构示意图;
26.图5为图1中仿生眼球的结构示意图;
27.图6为图1中调节组件的结构示意图;
28.图7为图1中支撑板的结构示意图。
29.附图标记:1、固定组件;2、支撑架;3、仿生眼球;4、支撑板;5、传动组件;6、连接组件;7、气缸;8、活动板;9、导向杆;10、固定板a;11、固定板b;12、调节组件b;13、齿条;14、齿轮;15、电机a;16、滚珠;17、固定套;18、伸缩杆;19、固定件a;20、连接块a;21、固定件b;22、连接块b;23、导轨;24、滑块;25、双向螺纹杆;26、电机b;27、摄像头固定件;28、透明保护盖;29、摄像头;30、调节组件a;31、主体板a;32、主体板b;33、安装孔a;34、安装孔b。
具体实施方式
30.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。
31.实施例一
32.如图1-2所示,本发明提出的一种人工智能图像处理装置,包括固定组件1、仿生眼球3、传动组件5和连接组件6;
33.固定组件1上设有支撑架2和两组支撑板4,两组仿生眼球3分别转动设置在支撑架2上;固定组件1包括固定平板和四个设有沉头孔的固定块,方便安装;支撑架2呈眼镜架状,且两组支撑板4分别与两组仿生眼球3对应设置;固定组件1上设有用于调节仿生眼球3方向的调节组件a30;其中,调节组件a30包括气缸7、活动板8、导向杆9、固定板a10、固定板b11、调节组件b12、齿轮14和电机a15;两组导向杆9设置在固定组件1上并位于支撑板4远离支撑架2的一侧,气缸7设置在固定组件1上并位于两组导向杆9之间,活动板8滑动设置在导向杆9上并与气缸7的伸缩轴连接;固定板b11通过三组固定板a10设置在活动板8上,调节组件b12滑动设置在固定板b11上,且调节组件b12底部设有齿条13;电机a15设置在位于中间的固定板a10上,且电机a15的转动轴穿过固定板a10;齿轮14设置在电机a15的转动轴上并与齿条13啮合传动连接;传动组件5设置在支撑板4上,两组连接组件6对称设置在传动组件5上,且传动组件5两端通过连接组件6分别与调节组件b12和仿生眼球3连接。
34.如图4所示,传动组件5包括滚珠16和固定套17;滚珠16转动设置在支撑板4上,两组固定套17设置在滚珠16上并分别位于支撑板4的两侧,且固定套17上设有滑动连接的伸缩杆18。
35.如图1和图3所示,连接组件6包括固定件a19、连接块a20和连接块b22;连接块a20
转动设置在固定件a19上,且连接块a20另一端设有固定件b21;连接块b22转动设置在固定件b21上并与伸缩杆18连接。
36.如图5所示,仿生眼球3包括摄像头固定件27、透明保护盖28和摄像头29;摄像头固定件27转动设置在支撑架2上并与固定件a19连接,且摄像头固定件27上设有安装槽;摄像头29设置在摄像头固定件27上并位于安装槽内,透明保护盖28与摄像头固定件27螺纹连接并盖住摄像头29;方便安装且保护摄像头29不易损坏;传动组件5与连接组件6为可拆卸连接。
37.本实施例中,通过固定板a10上的电机a15来带动齿轮14转动,此时设置在调节组件b12底部的齿条13驱动调节组件b12在固定板b11上滑动,固定件b21通过连接块a20在固定件a19上转动,伸缩杆18跟随连接块b22移动并在固定套17上滑出,同时带动滚珠16在支撑板4上转动;仿生眼球3通过连接组件6在固定套17和伸缩杆18的配合下在支撑架2上转动,从而通过摄像头29水平移动采集图像信息。通过气缸7推动活动板8沿着导向杆9设置的方向移动,固定板b11通过固定板a10跟随活动板8移动;此时固定套17和伸缩杆18通过连接块b22在固定件b21上转动,从而带动滚珠16在支撑板4上转动;仿生眼球3通过连接组件6在固定套17和伸缩杆18的配合下在支撑架2上转动,从而通过摄像头29垂直移动采集图像信息。电机a15和气缸7同时工作来带动摄像头29进行多维度移动采集图像信息。本发明可以模仿人类眼睛进行多维度转动获取图像信息,使得图像获取效果更好。
38.实施例二
39.本发明提出的一种人工智能图像处理装置,本实施例与实施例一相比,区别如图6所示,调节组件b12包括导轨23、滑块24、双向螺纹杆25和电机b26;滑块24滑动设置在导轨23并与固定块a19连接,双向螺纹杆25转动设置在导轨23上并与滑块24螺纹连接;电机b26设置在导轨23上,且电机b26的转动轴与双向螺纹杆25连接。
40.本实施例中,通过将气缸7和电机a15关闭,电机b26启动并带动双向螺纹杆25转动,此时滑块24移动并带动两组固定件a19往相同或者相反的相反移动,然后固定件b21通过连接块a20在固定件a19上转动,伸缩杆18跟随连接块b22移动并在固定套17上滑出,同时带动滚珠16在支撑板4上转动;仿生眼球3通过连接组件6在固定套17和伸缩杆18的配合下在支撑架2上转动,从而使得两组仿生眼球3向不同水平方向转动并通过摄像头29采集图像信息;采集图像信息的视野更加广泛。
41.实施例三
42.本发明提出的一种人工智能图像处理装置,本实施例与相较于实施例一或实施例二,区别如图7所示,支撑板4包括主体板a31、主体板b32、安装孔a33和安装孔b34;主体板a31和主体板b32上设有弧形安装槽,且在主体板a31和主体板b32相互靠近的一侧形成安装孔a33,在主体板a31和主体板b32相互远离的一侧形成安装孔b34;安装孔a33的直径大于安装孔b34的直径;方便安装传动组件5以及对其维护。
43.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
