1.本实用新型属于力学检测技术领域,尤其涉及一种复杂力学载荷承载验证模块的模型结构。
背景技术:
2.在力学测试领域,很多的工件或是部件,需要作力学载荷承载测试,验证其力学性能。
3.但是现有的力学载荷承载验证模块一般结构比较简单,能够验证的自由度比较低,无法对验证对象进行多方向上的载荷验证,因此需要提出一种多自由度的力学载荷承载验证模块。
技术实现要素:
4.本实用新型是为了解决背景技术中提出的技术问题,而提出的一种复杂力学载荷承载验证模块的模型结构。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种复杂力学载荷承载验证模块的模型结构,包括:
7.六自由度stewart并联机构,所述六自由度stewart并联机构包括动平台,所述动平台可实现在x、y、z三个方向的移动以及绕三个方向轴线的旋转;
8.六自由度加载模块,所述六自由度加载模块配置于所述动平台上,所述六自由度加载模块通过弹性元件使加力系统的位移与受力匹配,使得系统能够稳定加载到指定数值且保持稳定;
9.六分力传感器,所述六分力传感器上端通过法兰螺栓与六自由度加载模块底端连接固定,下端通过法兰螺栓与被测对象顶端连接固定,用于测出所述六自由度加载模块对被测对象在x、y、z三个方向的轴向力和力矩的数值。
10.优选的,所述六自由度stewart并联机构还包括支撑机架、上平台、致动器和基座,所述上平台通过所述支撑机架固定设置在所述基座上方,所述动平台处于上平台与基座之间,所述致动器上端与上平台通过上虎克铰连接,下端与动平台通过下虎克铰连接,所述上虎克铰具有二自由度,所述下虎克铰具有三自由度。
11.优选的,所述六自由度加载模块包括底盘和环形部以及u形部和上端部,所述底盘与所述六分力传感器固定连接,所述环形部套设于所述底盘外侧,且通过第一转动轴与所述底盘转动连接,所述u形部通过第二转动轴与所述环形部转动连接,所述上端部通过第三转动轴与所述u形部转动连接。
12.优选的,所述动平台为空心结构,所述六自由度加载模块设置于所述动平台内,所述上端部顶端固定连接法兰,且通过法兰与所述动平台上端固定连接。
13.优选的,所述模型结构还包括:激光测量装置,三个所述激光测量装置设置于所述基座上,所述激光测量装置包括激光测量仪,三个所述激光测量仪分别用于测量被测对象
在x、y、z三个方向的位移量。
14.优选的,所述激光测量装置还包括调节架,所述激光测量仪安装于所述调节架上,所述调节架可三维调节所述激光测量仪的位置。
15.与现有技术相比,本实用新型的有益效果是:
16.复杂力学载荷承载验证模块主要由一套六自由度stewart并联机构、六自由度加载模块、六分力传感器和三套激光测量装置构成,其能够在六个自由度上对被测对象施加力或者是力矩。
附图说明
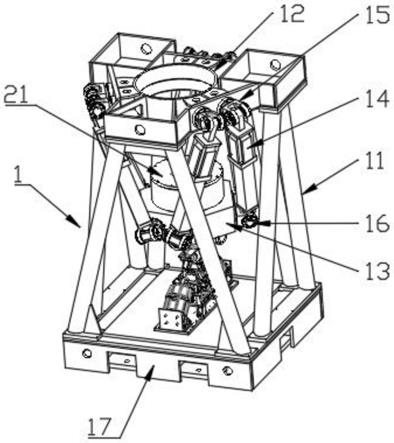
17.图1为本实用新型提出的一种复杂力学载荷承载验证模块的模型结构的立体结构示意图一;
18.图2为本实用新型提出的一种复杂力学载荷承载验证模块的模型结构的立体结构示意图二;
19.图3为本实用新型提出的一种复杂力学载荷承载验证模块的模型结构的六自由度模块的结构示意图;
20.图4为本实用新型提出的一种复杂力学载荷承载验证模块的模型结构的平面结构示意图;
21.图5为本实用新型提出的一种复杂力学载荷承载验证模块的模型结构的激光测量装置的结构示意图。
22.图中:1六自由度stewart并联机构、11支撑机架、12上平台、 13动平台、14致动器、15上虎克铰、16下虎克铰、17基座、2六自由度加载模块、21法兰、22第一转动轴、23第二转动轴、24第三转动轴、3六分力传感器、4激光测量装置、41底座、42螺纹丝杆、43 安装块、44升降手轮、45连接板、46激光测量仪、47滑块。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
24.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
25.参照图1-5,一种复杂力学载荷承载验证模块的模型结构,包括:
26.六自由度stewart并联机构1,六自由度stewart并联机构1包括动平台13,动平台13可实现在x、y、z三个方向的移动以及绕三个方向轴线的旋转;
27.六自由度加载模块2,六自由度加载模块2配置于动平台13上,六自由度加载模块2通过弹性元件使加力系统的位移与受力匹配,使得系统能够稳定加载到指定数值且保持稳定;
28.六分力传感器3,六分力传感器3上端通过法兰21螺栓与六自由度加载模块2底端
连接固定,下端通过法兰21螺栓与被测对象顶端连接固定,用于测出六自由度加载模块2对被测对象在x、y、z三个方向的轴向力和力矩的数值。
29.本实施例中优选的技术方案,六自由度stewart并联机构1还包括支撑机架11、上平台12、致动器14和基座17,上平台12通过支撑机架11固定设置在基座17上方,动平台13处于上平台12与基座 17之间,致动器14上端与上平台12通过上虎克铰15连接,下端与动平台13通过下虎克铰16连接,上虎克铰15具有二自由度,下虎克铰16具有三自由度。
30.本实施例中优选的技术方案,六自由度加载模块2包括底盘和环形部以及u形部和上端部,底盘与六分力传感器3固定连接,环形部套设于底盘外侧,且通过第一转动轴22与底盘转动连接,u形部通过第二转动轴23与环形部转动连接,上端部通过第三转动轴24与u 形部转动连接。
31.本实施例中优选的技术方案,动平台13为空心结构,六自由度加载模块2设置于动平台13内,上端部顶端固定连接法兰21,且通过法兰21与动平台13上端固定连接。
32.本实施例中优选的技术方案,模型结构还包括:激光测量装置4,三个激光测量装置4设置于基座17上,激光测量装置4包括激光测量仪46,三个激光测量仪46分别用于测量被测对象在x、y、z三个方向的位移量。
33.本实施例中优选的技术方案,激光测量装置4还包括调节架,激光测量仪46安装于调节架上,调节架可三维调节激光测量仪46的位置。
34.本实施例中优选的技术方案,调节架包括底座41、螺纹丝杆42、安装块43、升降手轮44、连接板45和滑块47,螺纹丝杆42固定设置于底座41上,安装块43滑动套接于螺纹丝杆42外侧,升降手轮 44螺纹套接于螺纹丝杆42外侧,且处于安装块43下侧,安装块43 内滑动穿插有齿杆,齿杆啮合连接有齿轮,安装块43外侧转动配置有与齿轮同轴固定连接的传动齿轮,滑块47可滑动的配置于齿杆的一端,连接板45与滑块47固定连接,激光测量仪46固定安装在连接板45上。
35.进一步具体的实施例中,该复杂力学载荷承载验证模块主要由一套六自由度stewart并联机构1、六自由度加载模块2、六分力传感器3和三套激光测量装置4构成;
36.其中,六自由度stewart并联机构1实现对加载平面x、y、z轴方向的位移和沿三根轴线的转动,其作用有二,一是给被测对象同时施加x、y、z轴向力和沿其转动方向的力矩,即实现同时可实现三维加载3个方向的力和力矩,二是调整六自由度加载模块2与六分力传感器3相互接口位置,便于装夹;六自由度stewart并联机构1上平台12用来固定致动器14位置,与六组致动器14通过上虎克铰15连接,上虎克铰15为二自由度,致动器14上端与上平台12通过上虎克铰15连接,下端与动平台13通过下虎克铰16连接,下虎克铰16 为三自由度;
37.具体可选的,致动器14输出六自由度力和力矩,采用深圳迈茨工业电动缸,型号:dmc93-05200-0010-300-61-02,滚珠丝杆导程 5mm,行程200mm,额定出力10.4kn,额定速度250mm/sec。内置其中的伺服电机选用日本安川sgm7a系列,型号: smg7a-30afa6c sgd7s-200a,电机功率3kw,额定扭矩9.8n.m,额定转速3000rpm,减速比1:1,线缆10m,该电机具有结构紧凑,出力大等特点;
38.动平台13与虎克铰之间的旋转轴承采用交叉圆柱滚子轴承,这种轴承轴向尺寸小,刚性高,在机器人领域广泛应用,其规格代号为 xrb8016,基本额定定载荷42.1kn,以确保承载能力;
39.并联机构1动平台13固定六自由度加载模块2位置,考虑到六自由度加载模块2的加力面应距离动平台13虎克铰平面近,故动平台13采用空心结构,如此可以将六自由度加载模块2安置在动平台 13内部;
40.并联机构1支撑机架11起到固定被测机构以及支撑固定并联机构1整体的作用,其由两部分组成,分别为底座41和斜拉杆支撑结构。底座41由焊接板焊接而成,斜拉杆支撑结构下端通过螺栓连接固定在底座41上,上端通过螺栓连接与六自由度并联机构1上平台 12连接固定,该结构具有重量轻、刚性好等特点。
41.六自由度加载模块2作用是通过弹性元件使加力系统的位移与受力匹配,使得系统能够稳定加载到指定数值且保持稳定,在六自由度stewart并联机构1驱动下,具有六自由度低刚度加载能力,六自由度加载模块2通过上端法兰21螺栓与六自由度并联机构1动平台 13上端连接固定;具体的以x转轴为例,对转动轴进行说明,在六自由度stewart并联机构1作用下,六自由度加载模块2将实现绕x 轴进行旋转,用交叉滚子轴承支撑,但在被测件的约束下,整体框架并未按设定的旋转角度旋转,只有六自由度加载模块2的上端实现了按设定旋转角度旋转,此时,框和模块之间产生了一个转角,则模块内相应的弹性部件被压缩,进而弹性部件产生弹力,该作用力会被施加在被测对象上。
42.六分力传感器3上端通过法兰21螺栓与六自由度加载模块2底端连接固定,下端通过法兰21螺栓与被测装置顶端连接固定,本实施例中选用南京溧航仿生产业研究院有限公司的六分力传感器3,型号cgt92005bao,该六分力传感器3能精确测出加载模块对被测对象 x、y、z轴向力和力矩的数值;
43.将三个位移测量系统模块安装在工作台模块上,分别测量x、y、 z三个方向的位移量,位移测量系统模块底座41底部装有圆形强磁铁,将位移测量系统模块吸附在工作台面上;旋拧升降手轮44通过嵌入其中的圆头销在螺旋槽中滑动控制位移测量装置竖直方向高度升降,水平y方向位置通过旋拧传动手轮带动齿轮传动调整齿杆位置,纵深x方向位置通过移动滑块47控制,调整到合适位置后通过螺栓锁死固定位置。
44.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
