1.本发明涉及电力施工技术领域,特别涉及一种基于工程实景的电力基建工程施工进度管控系统及方法。
背景技术:
2.随着地区经济发展迅速,对于电力需求越来越大,随之而来的就是电网基建工程建设数量的增加,电网基建工程监管由于点多面广等因素,在实际施工现场环境下会存在规划图与实际施工点不一致、工程量计量不准确、隐蔽工程记录不全面、实地化监督难度大等问题,对项目的监管、测量和进度带来一定的困难,同时也影响工程耗材的投放,增加了电力基建工程材料成本。
3.电网基建工程的施工进度主要可以通过施工里程来进行展示,而在实际施工过程中,实际里程往往与规划里程存在差异,因此就需要施工人员周期性的对施工里程进行监控以了解当前施工进度以及材料的使用情况,而目前对于施工进度的管控基本是由施工人员人工进行,由于线路里程较长、环境较复杂等,人工进行进度的查询需要耗费较多的时间,效率较低。
技术实现要素:
4.鉴以此,本发明提出一种基于工程实景的电力基建工程施工进度管控系统及方法,通过数据采集获取实际里程,并与规划里程进行对比,以实现施工进度的管控。
5.本发明的技术方案是这样实现的:
6.基于工程实景的电力基建工程施工进度管控系统,包括:
7.计划信息采集模块,用于获取规划施工点的坐标数据、工程线路规划总长度以及工程点地形地貌信息;
8.实景信息采集模块,用于获取实际施工点的坐标数据、海拔高度数据以及施工点杆塔高度进行采集;
9.数据处理及比对模块,用于处理计划信息采集模块以及实景信息采集模块采集的信息,并进行比对后获得比对结果;
10.预警显示模块,根据比对结果进行预警显示;
11.所述数据处理及比对模块包括位置比对模块、计划里程计算模块、实际里程计算模块以及里程比对模块,所述计划里程计算模块与计划信息采集模块数据连接,所述实际里程计算模块与实景信息采集模块数据连接,所述里程比对模块分别与计划里程计算模块、实际里程计算模块以及预警显示模块数据连接,所述位置比对模块分别与计划信息采集模块、实景信息采集模块以及预警显示模块数据连接。
12.优选的,所述实景信息采集模块包括北斗定位仪、测距仪以及摄像头,所述北斗定位仪用于获取实际施工点的坐标数据,所述测距仪用于获取海拔高度数据以及施工点杆塔高度,所述摄像头用于采集施工点图像数据,所述位置比对模块与北斗定位仪数据连接。
13.优选的,所述实景信息采集模块还包括数据整合模块,所述数据整合模块分别与北斗定位仪、测距仪、摄像头以及数据处理及里程比对模块数据连接。
14.优选的,所述数据处理及比对模块还包括分类模块,所述分类模块分别与数据整合模块以及实际里程计算模块数据连接。
15.优选的,所述数据整合模块将数据包通过4g/5g传输给分类模块。
16.基于工程实景的电力基建工程施工进度管控方法,包括以下步骤:
17.步骤s1、获取实际施工点的坐标数据、海拔高度数据以及施工点杆塔高度,获取规划施工点的坐标数据、工程线路规划总长度以及工程点地形地貌信息;
18.步骤s2、根据实际施工点的坐标数据以及规划施工点的坐标数据进行位置比对,并获得位置比对结果;
19.步骤s3、根据实际施工点的坐标数据、海拔高度数据以及施工点杆塔高度获取实际里程,根据工程线路规划总长度获取规划里程;
20.步骤s4、比对实际里程以及规划里程,并获得里程比对结果;
21.步骤s5、根据位置比对结果以及里程比对结果进行预警显示。
22.优选的,所述步骤s3的具体步骤包括:
23.步骤s31、根据坐标数据获取两施工杆塔之间的距离d;
24.步骤s32、根据海拔高度数据以及施工点杆塔高度数据获取两施工杆塔的落差h;
25.步骤s33、根据距离d和落差h计算获得实际里程l;
26.优选的,所述步骤s31的计算公式为:
27.d=r*arcos[cos(y1)*cos(y2)*cos(x
1-x2) sin(y1)*sin(y2)];
[0028]
所述步骤s32的计算公式为:
[0029]
h=h2 h
4-h
1-h3;
[0030]
所述步骤s33的计算公式为:
[0031][0032]
其中r为地球半径,取6371km,x1、x2为两杆塔的经度,y1、y2为两杆塔的纬度,h1、h2为两杆塔所处地点的海拔高度,h3、h4为施工点两杆塔高度。
[0033]
优选的,所述步骤s4的里程比对结果c=d
2-l,其中d2为规划里程。
[0034]
优选的,所述步骤s1在获取实际施工点的坐标数据、海拔高度数据以及施工点杆塔高度后,进行数据整合以形成数据包进行发送。
[0035]
与现有技术相比,本发明的有益效果是:
[0036]
本发明提供了一种基于工程实景的电力基建工程施工进度管控系统及方法,对实景信息进行采集,包括实际施工点的坐标数据、海拔搞对数据以及施工点杆塔高度,通过对这些数据进行整合处理后,可以获得目前正在施工的线路的实际里程,然后与规划的里程进行里程对比,并同时根据实际坐标数据和规划坐标数据进行位置对比,为项目进度管控和用料管控提供真实参考依据。
附图说明
[0037]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的优选实施例,对于
本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0038]
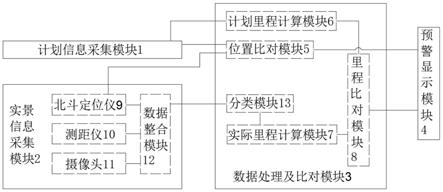
图1为本发明的基于工程实景的电力基建工程施工进度管控系统的原理图;
[0039]
图2为本发明的基于工程实景的电力基建工程施工进度管控方法的流程图;
[0040]
图3为本发明的基于工程实景的电力基建工程施工进度管控方法的实际里程计算示意图;
[0041]
图中,1为计划信息采集模块,2为实景信息采集模块,3为数据处理及比对模块,4为预警显示模块,5为位置比对模块,6为计划里程计算模块,7为实际里程计算模块,8为里程比对模块,9为北斗定位仪,10为测距仪,11为摄像头,12为数据整合模块,13为分类模块。
具体实施方式
[0042]
为了更好理解本发明技术内容,下面提供一具体实施例,并结合附图对本发明做进一步的说明。
[0043]
参见图1,本发明提供的基于工程实景的电力基建工程施工进度管控系统,包括:
[0044]
计划信息采集模块,用于获取规划施工点的坐标数据、工程线路规划总长度以及工程点地形地貌信息;
[0045]
实景信息采集模块,用于获取实际施工点的坐标数据、海拔高度数据以及施工点杆塔高度进行采集;
[0046]
数据处理及比对模块,用于处理计划信息采集模块以及实景信息采集模块采集的信息,并进行比对后获得比对结果;
[0047]
预警显示模块,根据比对结果进行预警显示;
[0048]
所述数据处理及比对模块包括位置比对模块、计划里程计算模块、实际里程计算模块以及里程比对模块,所述计划里程计算模块与计划信息采集模块数据连接,所述实际里程计算模块与实景信息采集模块数据连接,所述里程比对模块分别与计划里程计算模块、实际里程计算模块以及预警显示模块数据连接,所述位置比对模块分别与计划信息采集模块、实景信息采集模块以及预警显示模块数据连接。
[0049]
本发明的一种基于工程实景的电力基建工程施工进度管控系统,用于点电力基建工程施工中的进度进行自动的管控,其中包括位置的管控以及里程的管控,通过对位置以及里程的管控可以保证项目施工进度的有序且正常推进,在进行位置管控时,首先会获取规划施工点的坐标数据以及实际施工点的坐标数据,然后位置比对模块可以根据两个坐标数据进行位置比对,比对完成后会获得位置比对结果,预警显示模块可以根据位置比对结果进行预警显示,以便于施工人员掌握当前施工的位置以及施工点是否符合规划的要求。
[0050]
另外的,本发明还需要进行里程比对,计划信息采集模块可以获取规划施工点的工程线路规划总长度,然后由计划里程计算模块计算得到规划里程,而实际里程计算模块根据实际施工点的坐标数据、海拔高度数据以及施工点杆塔高度进行计算后可以得到实际里程,将实际里程与规划里程进行比对,并获得里程比对结果,最终预警显示模块可以将里程比对结果进行预警显示,方便施工人员了解当前施工进度情况以及用料情况,通过本发明的管控系统,能够实现电力基建工程施工进度的整体管控效率,及时根据工程位置实景情况快速判断、更改规划、决策用料,保障电力基建工程过程安全、高效,提升整体电力基建
工程施工效率。
[0051]
优选的,所述实景信息采集模块包括北斗定位仪、测距仪以及摄像头,所述北斗定位仪用于获取实际施工点的坐标数据,所述测距仪用于获取海拔高度数据以及施工点杆塔高度,所述摄像头用于采集施工点图像数据,所述位置比对模块与北斗定位仪数据连接。
[0052]
北斗定位仪用于采集现场施工地点的坐标数据,测距仪则采集海拔高度、施工点杆塔高度,摄像头采集施工点的图像数据,所采集的数据输送到数据处理及比对模块中后,可以进行实际里程的计算。
[0053]
优选的,所述实景信息采集模块还包括数据整合模块,所述数据整合模块分别与北斗定位仪、测距仪、摄像头以及数据处理及里程比对模块数据连接,所述数据处理及比对模块还包括分类模块,所述分类模块分别与数据整合模块以及实际里程计算模块数据连接,所述数据整合模块将数据包通过4g/5g传输给分类模块。
[0054]
为保证数据传输的完整性,本发明还设置了数据整合模块,可以将实际施工点坐标数据、海拔高度数据以及施工点杆塔高度数据整合到现场图像中以及形成数据包,然后将数据包通过4g/5g输送到数据处理及比对模块的分类模块中,由分类模块对数据进行分类后以便于实际里程计算模块进行计算。
[0055]
参见图2-图3,本发明的基于工程实景的电力基建工程施工进度管控方法,包括以下步骤:
[0056]
步骤s1、获取实际施工点的坐标数据、海拔高度数据以及施工点杆塔高度,获取规划施工点的坐标数据、工程线路规划总长度以及工程点地形地貌信息;
[0057]
步骤s2、根据实际施工点的坐标数据以及规划施工点的坐标数据进行位置比对,并获得位置比对结果;
[0058]
步骤s3、根据实际施工点的坐标数据、海拔高度数据以及施工点杆塔高度获取实际里程,根据工程线路规划总长度获取规划里程;
[0059]
所述步骤s3的具体步骤包括:
[0060]
步骤s31、根据坐标数据获取两施工杆塔之间的距离d,
[0061]
d=r*arcos[cos(y1)*cos(y2)*cos(x
1-x2) sin(y1)*sin(y2)];
[0062]
步骤s32、根据海拔高度数据以及施工点杆塔高度数据获取两施工杆塔的落差h,h=h2 h
4-h
1-h3;
[0063]
步骤s33、根据距离d和落差h计算获得实际里程l,
[0064]
其中r为地球半径,取6371km,x1、x2为两杆塔的经度,y1、y2为两杆塔的纬度,h1、h2为两杆塔所处地点的海拔高度,h3、h4为施工点两杆塔高度。
[0065]
本发明通过对规划信息和实际施工信息进行获取,并计算得到对应的实际里程后,将实际里程与规划里程进行比对,从而可以清楚的获得目前施工的进度以及用料的情况,以便于施工人员进行在线式的管控,方便电力基建工程施工进度管理者做好相应的进度管控和物料资源调整。
[0066]
而对于实际里程的计算而言,由于本发明重点在于比对实际工程位置以及线路长度,因此采用较为简单的三角形勾股定理进行计算,如图3所示,获取量杆塔之间的坐标数据后,根据地球的半径可以计算得到两杆塔之间的水平距离d,然后根据杆塔所处的海拔高度以及电线杆的高度可以计算得到施工点落差h,最终根据勾股定理可以计算得到电线长
度l,即实际里程,由于规划里程在规划信息表中有体现,因此规划里程可以直接获取。
[0067]
步骤s4、比对实际里程以及规划里程,并获得里程比对结果,里程比对结果c=d
2-l,其中d2为规划里程。
[0068]
步骤s5、根据位置比对结果以及里程比对结果进行预警显示。
[0069]
在获取规划里程d2后,根据d2与实际里程l的差值可以得到里程比对结果。
[0070]
优选的,所述步骤s1在获取实际施工点的坐标数据、海拔高度数据以及施工点杆塔高度后,进行数据整合以形成数据包后通过4g/5g网络进行发送。
[0071]
最终根据规划与实际信息进行显示,并通过累加实际施工长度与计划总长度的对比,实现施工工程进度比例的直观观察,为项目进度管控和用料管控提供真实参考依据。
[0072]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
