技术特征:
1.一种考虑全捷联导引头视场约束的弹群协同制导控制一体化设计方法,其特征在于步骤如下:步骤1:建立弹群全捷联导引头视线解耦模型、二维空间内导弹-目标的相对运动模型以及弹体姿态控制系统模型(a)建立弹群全捷联导引头视线解耦模型其中,下标i表示弹群第i枚导弹,n表示弹群总数量;q
bli
表示体视线角,表示体视线角速率,q
li
表示惯性系下飞行平面内弹-目相对视线角,表示惯性系下的弹-目相对视线角速率,d
1i
表示导弹不确定性,ω
zi
表示俯仰角速率;(b)建立弹群-目标的相对运动模型其中,分别是相对于惯性系的弹目视线角和视线角速率;分别是导弹-目标相对距离和相对速度;a
t
是目标受到的侧向加速度;θ
mi
,θ
t
分别是导弹与目标的飞行航迹角;和为导弹气动参数;m
i
,s
i
,q
i
分别表示弹群第i枚导弹的质量、参考面积以及飞行动压;α
i
,δ
i
分别表示导弹攻角和舵偏角;和分别表示第i枚导弹侧向力系数对α
i
和δ
i
的偏导数;d
2i
表示由目标不确定机动、未建模动态和气动不确定性等引起的干扰项;(c)建立弹群姿态控制系统模型
其中,m
zi
,j
zi
分别是俯仰力矩和俯仰转动惯量;d
αi
,d
ωi
是空气动力系数引起的不确定;表示导弹气动力及气动力矩系数;l
i
为参考长度;分别是俯仰力矩系数对攻角α
i
、舵偏角δ
i
以及无量纲化的俯仰角速度的偏导数;v
mi
为导弹飞行速度;ω
zi
为俯仰角速度;d
qmi
、d
3i
、d
4i
表示未知的干扰项;步骤2:选择状态变量和系统输入变量,建立考虑视场角约束的弹群制导控制一体化状态空间数学模型选择状态变量分别为x
1i
=q
bli
,x
3i
=α
i
,x
4i
=ω
zi
,系统的输入u
i
=δ
i
,得到弹群系统的状态空间模型如下:为了便于区分领弹和从弹,后续推导中给领弹的状态变量加后缀l,从弹的状态变量加后缀c,如x
1i_l
代表第i枚领弹的第1个状态,如x
3i_c
代表第i枚从弹的第3个状态;步骤3:选定弹群中的领弹与从弹,给定弹间的通讯拓扑架构在由n枚同构或异构导弹组成的弹群中,选定其中领弹m枚,从弹n枚;定义第1枚到第m枚导弹为领弹,第m 1枚到第n枚导弹为从弹;记为弹群通讯拓扑图的邻接矩阵,记l表示弹群通讯拓扑图的laplace矩阵;步骤4:在给定视场角约束边界下,计算领弹与从弹的虚拟控制量x
2i_l
与x
2i_c
(1)计算弹群中领弹x
2i_l
的虚拟控制律计算第i枚领弹的状态跟踪误差变量s
1i_l
为:s
1i_l
=x
1i_l-x
1ci_l
,i=1,2,...,m其中,x
1ci_l
表示状态x
1i_l
的虚拟控制量,在本文设计的方法中是一个常值;q
c
为全捷联导引头视场范围;计算x
2ci_l
为:
其中,为第i枚导弹不确定项d
1i_l
的估计值,k
1l
,k
11l
为设计参数;计算第i枚领弹向相邻从弹发送的协同指令信息为:(2)计算弹群中第i枚从弹x
2i_c
的虚拟控制律计算第i枚从弹的误差变量s
1i_c
为:其中,l
ij
为laplace矩阵第i行第j列的元素;计算虚拟控制指令x
2ci_c
为:其中,r
i_c
是第i枚从弹与目标的相对距离;o
i_c
为中间变量;c
i_c
为从弹协同指令信息;为从弹协同指令信息;表示第i枚导弹与其相邻从弹对其自身干扰项d
1i_c
估计值的上界;k
1f
,k
11f
为设计参数;e为自然常数;根据下式对模型不确定性进行估计:其中,与为干扰观测器引入的中间变量,κ
1f
,κ
1l
为设计参数;计算一阶滤波器的输出x
2di_l
及其微分及其微分其中,τ
2f
,τ
2l
为设计参数;
步骤5:计算状态x
3i
的虚拟控制量x
3ci_l
与x
3ci_c
计算弹群中领弹与从弹的误差变量s
2i_l
与s
2i_c
如下:分别计算状态x
3i_l
与x
3i_c
的虚拟控制量x
3ci_l
与x
3ci_c
如下:其中,其中,为领弹观测器对干扰d
2i_l
的观测值;的观测值;为从弹观测器对干扰d
2i_c
的观测值,k
2f
,k
21f
,k
2l
,k
21l
为设计参数;根据下式估计模型不确定性:其中,与为干扰观测器引入的中间变量,κ
2l
,κ
2f
为设计参数;计算一阶滤波器的输出x
3di_l
及其微分及其微分其中,τ
3l
,τ
3f
为设计参数;步骤6:计算x
4i_l
与x
4i_c
的虚拟控制量计算领弹与从弹的误差变量s
3i_l
与s
3i_c
如下:计算x
4i_l
与x
4i_c
的虚拟控制量如下:
其中,k
3f
,k
31f
,k
3l
,k
31l
为设计参数,为设计参数,为领弹观测器对干扰d
3i_l
的观测值;值;为从弹观测器对干扰d
3i_c
的观测值;根据下式估计模型的不确定性:其中,与为干扰观测器引入的中间变量,κ
3l
,κ
3f
为设计参数;计算一阶滤波器的输出x
4di_l
及其微分及其微分其中,τ
4l
,τ
4f
为设计参数;步骤7:计算弹群制导控制一体化的舵偏角指令计算领弹与从弹的状态跟踪误差变量s
4i_l
与s
4i_c
如下:计算领弹与从弹控制律u
i_l
、u
i_c
为:其中,其中,为零弹干扰d
4i_l
的观测值;的观测值;为从弹干扰d
4i_c
的观测值;k
41l
,k
4l
,k
41f
,k
4f
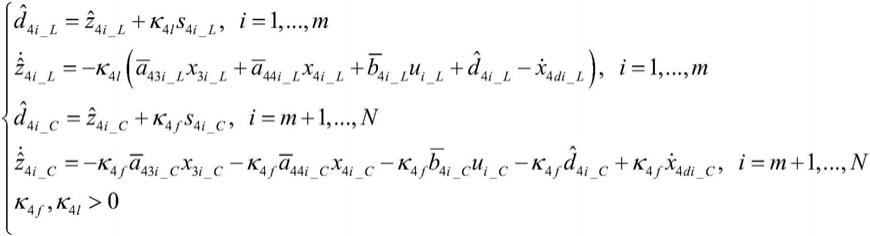
为设计参数;根据下式对模型的不确定性进行估计:
其中,与为干扰观测器引入的中间变量,κ
4l
,κ
4f
为设计参数;步骤8:结合步骤4~步骤7综合得到最终考虑全捷联导引头视场角约束的弹群制导控制一体化设计结果;给出最终的控制器表达式如下:(1)弹群中领弹的控制器表达式(2)弹群中从弹的控制器表达式
技术总结
本发明涉及一种考虑全捷联导引头视场约束的弹群协同制导控制一体化设计方法,属于制导技术领域。首先建立起具有严格状态反馈形式的全捷联弹群协同制导与控制一体化设计模型;其次,以体视线角作为协同变量,设计了一种基于“领弹-从弹”架构的全捷联弹群协同围捕策略;最后,采用了非线性干扰观测器、Lyapunov函数与动态面控制相结合的控制方法,在目标机动和气动扰动存在的条件下,同时实现了视场角约束以及弹群协同制导。本发明所提方法满足了一体化制导控制精度和全捷联导引头视场角约束条件,保证了弹群在协同制导控制过程中全捷联导引头探测的体视线角满足导引头视场约束。导引头探测的体视线角满足导引头视场约束。导引头探测的体视线角满足导引头视场约束。
技术研发人员:赵斌 周军 黄晓阳
受保护的技术使用者:西北工业大学
技术研发日:2021.08.16
技术公布日:2022/3/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。