1.本发明涉及核电站自动化检修设备领域,特别是一种一次侧堵板多自由度拆装机器人及方法。
背景技术:
2.核电作为一种安全、可靠、清洁、高效的电力能源,是我国能源发展的战略重点。随着我国核电产业的迅猛发展和核电市场的扩大,提高核设施的安全性与可靠性,尽量降低操作人员的受辐射剂量,改善操作人员的工作环境,是我国核电行业一个亟待解决的课题。我国在核电站机器人领域工作开展较晚,近年来虽然开发了少量的机械手或机器人平台,实现了局部放射性环境下的特定操作,但数量少,应用面窄,且智能化及可靠性不高。目前有很多工作还是由人工直接完成。
3.由于核电站内很多维修区域属于高放射性的特殊环境,或者因为部件布置密集,很多区域人员不可到达,世界各国针对核电站高放射性设备的检查、维修、清洗及缺陷修复工作,开发出了大量智能化、自动化、人员远距离控制的高端专用机器人工具,已经形成了核电机器人产业,大大提高了核电站运行的可靠性和经济性。
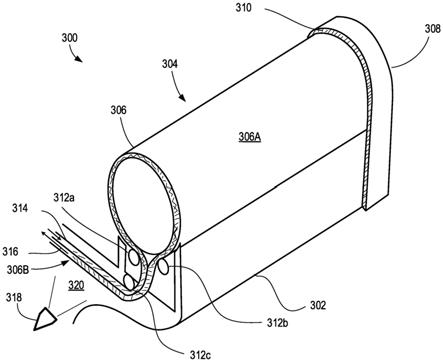
4.蒸汽发生器下部的水室结构如图12-13所示,水室7内部设有内腔,水室7内腔中设有竖直布置的隔板71,隔板71将水室7内腔分隔为第一子腔721和第二子腔722,水室7下端设有连通至第一子腔721的第一人孔731、连通至第二子腔722的第二人孔732、连通至第一子腔721的第一主管道孔741及连通至第二子腔722的第二主管道孔742,第一主管道孔741和第二主管道孔742的孔口处均设有环形凸台和螺栓孔。
5.在核电站大修期间,需对蒸汽发生器内部进行检修,由于蒸汽发生器通过主管道与反应堆压力容器直接相连,为防止蒸汽发生器一次侧异物通过主管道进入压力容器对堆芯燃料产生破坏,需要对一回路主管道进行临时封堵,此工况下用于封堵的堵板称为低水位堵板。在核电站首次检修及十年大修期间,蒸汽发生器的检修工作是在堆水池储水时进行,一方面,为防止蒸汽发生器一次侧异物通过主管道进入压力容器对堆芯燃料产生破坏,另一方面,出于承受水压和密封需要,再一方面,为防止一回路水从蒸汽发生器的人孔溢出,,需要对一回路主管道进行临时封堵,此工况下用于封堵的堵板称为高水位堵板。低水位堵板和高水位堵板并称一次侧堵板。
6.所述低水位堵板(图中未示出)可拆卸安装在第一主管道孔741中,低水位堵板的侧边处设有挂板,低水位堵板通过挂板挂在第一主管道孔741孔口处的环形凸台上,以将第一主管道孔741封闭。
7.所述高水位堵板(图中未示出)可拆卸安装在第二主管道孔742中,高水位堵板上设有光孔,使用螺栓穿过高水位堵板上的光孔和第二主管道孔742孔口处的的螺栓孔,而将高水位堵板安装在第二主管道孔742中,从而将第二主管道孔742封闭。
8.目前,一次侧堵板的装拆工作都是由人工完成,即由操作人员通过人孔钻入或钻出水室内进行拆装,在国内外还未见针对一次侧堵板拆装的专用设备的相关研究。人工拆
装一次侧堵板需要操作人员将对折的一次侧堵板送入水室,操作人员进入水室再进行安装。一方面,由于一次侧堵板重量较大,对操作人员的体力消耗也较大;另一方面,为了尽可能降低核辐射对身体的损害,每个操作人员在水室内的工作时间非常有限,所以在每步操作过程中会频繁有人员进出人孔,需要多个操作人员配合和接力;再一方面,每执行一次堵板拆装工作,参与工作的人员约受到3-10msv的剂量照射。在这样的高辐射环境下工作,容易发生沾污事件和单日辐射剂量过高事件。
技术实现要素:
9.本发明的目的是克服现有技术的不足,而提供一种一次侧堵板多自由度拆装机器人及方法。它解决了核电站的蒸汽发生器在检修期间,一次侧堵板均由人工拆装,存在操作人员劳动强度大、需要操作人员数量较多、操作人员易受到到过量核辐射的问题。
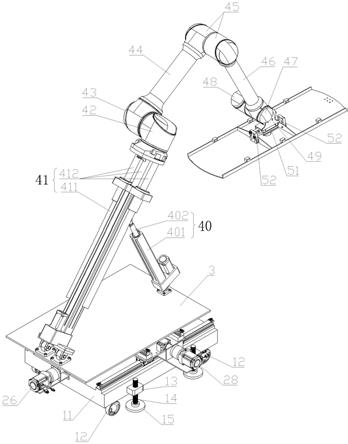
10.本发明的技术方案是:一次侧堵板多自由度拆装机器人,包括移动小车、平移驱动机构、承载板、抓手位姿调整机构及抓手;移动小车包括车身和安装在车身下端的万向轮,车身上端设有安装平面;平移驱动机构安装在车身的安装平面上,并与承载板关联,用于驱动承载板在水平面内做纵向或横向移动;抓手位姿调整机构安装在承载板上,并与抓手关联,用于调整抓手在空间中的位姿。
11.本发明进一步的技术方案是:平移驱动机构包括底层纵向轨道、中层滑动架、中层横向轨道、上层滑动架、纵向螺杆、纵向驱动电机、横向螺杆和横向驱动电机;底层纵向轨道固定安装在车身上端的安装平面上;中层滑动架滑动安装在底层纵向轨道上;中层横向轨道固定安装在中层滑动架上,并垂直于底层纵向轨道;上层滑动架在下端与中层横向轨道滑动配合,在下端与承载板固定连接;纵向螺杆与中层滑动架螺纹连接,并平行于底层纵向轨道布置,纵向螺杆的一端通过轴承和轴承座活动安装在车身上端的安装平面上,另一端通过联轴器与纵向驱动电机的机轴连接;纵向驱动电机固定安装在车身上端的安装平面上;横向螺杆与上层滑动架螺纹连接,并平行于中层横向轨道布置,横向螺杆的一端通过轴承和轴承座活动安装在中层滑动架上,另一端通过联轴器与横向驱动电机的机轴连接;横向驱动电机固定安装在中层滑动架上本发明再进一步的技术方案是:底层纵向轨道数量为两条,两条底层纵向轨道相互平行布置,并分布在车身的安装平面的两侧;中层滑动架包括滑块a、基座板a、端板和螺母a;两个滑块a分别固定连接在基座板a的下端两侧;两个端板相对布置并固连在基座板a的两侧;螺母a固连在基座板a的下端;中层滑动架通过螺母a与纵向螺杆螺纹连接,通过两个滑块a分别与两条底层纵向轨道滑动配合,通过基座板a的上表面与中层横向轨道固定连接,通过端板与横向驱动电机固定连接;中层横向轨道的数量为两条,两条中层横向轨道相互平行布置,并分布在基座板a的上表面的两侧;上层滑动架包括滑块b、基座板b和螺母b;两个滑块b分别固定连接在基座板b的下端两侧;螺母b固连在基座板b的下端;上层滑动架通过基座板b的上表面与承载板固连,通过两个滑块b分别与两条中层横向轨道滑动配合,通过螺母b与横向螺杆螺纹连接。
12.本发明更进一步的技术方案是:抓手位姿调整机构包括多自由度机械臂和可伸缩支承装置;多自由度机械臂包括从后端至前端依次转动连接的一号臂、转动关节a、转动关节b、二号臂、转动关节c、三号臂、转动关节d、转动关节e和转动关节f;一号臂后端铰接在承
载板上,转动关节f直接或间接与抓手连接;可伸缩支承装置下端铰接在承载板上,上端与一号臂铰接,可伸缩支承装置通过伸缩带动一号臂绕其后端的铰接处转动。
13.本发明更进一步的技术方案是:一号臂包括电动推杆a;电动推杆a包括壳体a和伸缩杆a,伸缩杆a从壳体a上端伸出,并相对于壳体a做直线往复运动;壳体a的下端与承载板铰接,伸缩杆a与转动关节a连接;可伸缩支承装置包括电动推杆b;电动推杆b包括壳体b和伸缩杆b,伸缩杆b从壳体b上端伸出,并相对于壳体b做直线往复运动;壳体b的下端与承载板铰接,伸缩杆b与电动推杆a的壳体a铰接,伸缩杆b通过伸缩带动电动推杆a绕其下端的铰接处转动。
14.本发明更进一步的技术方案是:抓手通过安装座安装在转动关节f上,安装座上设有用于连接摄像头的安装孔a、用于连接探照灯的安装孔b、用于连接抓手的安装孔c和用于连接转动关节f的安装孔d。
15.本发明更进一步的技术方案是:抓手包括双头气缸、夹板和锁定柱;双头气缸包括缸体和从缸体两端伸出的活塞杆a和活塞杆b,双头气缸的缸体与安装座固定连接;两个夹板分别固定连接在活塞杆a和活塞杆b的端头上,并相对布置,两个夹板之间形成夹持区域;两组锁定柱分别焊固在两块夹板上,并均位于夹持区域内,锁定柱与夹板连接的一端为后端,远离夹板的一端为前端,锁定柱整体呈锥台形,锁定柱从前端至后端直径逐渐扩大。
16.本发明更进一步的技术方案是:移动小车还包括设置在车身前端两侧和车身后端两侧的共四组撑地组件;撑地组件包括螺母c、竖向螺杆和撑地底盘;螺母c焊固在车身侧边处;竖向螺杆螺纹连接在螺母c上,并呈竖直布置;撑地底盘连接在竖向螺杆的下端。
17.本发明的技术方案是:一次侧堵板安装方法,基于上述的一次侧堵板多自由度拆装机器人,用于核电站蒸汽发生器下部水室的一次侧堵板安装工作;所述水室内部设有内腔,水室内腔中设有第一子腔和第二子腔,水室下端设有连通至第一子腔的第一人孔、连通至第二子腔的第二人孔、连通至第一子腔的第一主管道孔及连通至第二子腔的第二主管道孔,水室内腔中设有环绕第一主管道孔边沿布置的环形凸台和设在第二主管道孔边沿处的多个螺栓孔;所述一次侧堵板包括可拆卸安装在水室第一主管道孔处的低水位组合堵板和可拆卸安装在水室第二主管道孔处的高水位组合堵板;低水位组合堵板为圆形板,其包括中间分体a及通过公母插接块活动连接在中间分体a两侧的侧分体a,中间分体a和侧分体a分别在同一侧端面上设有两条平行布置的定位筋a,每条定位筋a上设有一组定位孔a,中间分体a及侧分体a的侧边处焊固有l形挂板;高水位组合堵板为圆形板,其包括中间分体b及通过公母插接块活动连接在中间分体b两侧的侧分体b,中间分体b和侧分体b分别在同一侧端面上设有两条平行布置的定位筋b,每条定位筋b上设有一组定位孔b,中间分体b和侧分体b的侧边处分别设有光孔;所述的安装方法包括低水位组合堵板的安装方法和高水位组合堵板的安装方法;低水位组合堵板的安装方法如下:s01,将一次侧堵板多自由度拆装机器人移动到工作位置:a、推动移动小车,将一次侧堵板多自由度拆装机器人移动至水室的第一人孔下方;b、使用扳手分别拧转四组撑地组件的竖向螺杆,使四组撑地组件的撑地底盘均与
地面接触,并使车身下端所有的万向轮脱离地面,并使承载板上表面保持水平;s02,安放中间分体a:a、控制抓手位姿调整机构和抓手的动作,夹住中间分体a上的两条定位筋a;b、夹持稳固后,控制抓手位姿调整机构的动作,将中间分体a从第一人孔送入水室的第一子腔内,并通过l形挂板挂在第一主管道孔边沿处的环形凸台上;c、控制抓手位姿调整机构的动作,使抓手退出水室的第一子腔;s03,安装两块侧分体a:a、控制抓手位姿调整机构和抓手的动作,夹住其中一块侧分体a上的两条定位筋a,夹持稳固后,控制抓手位姿调整机构的动作,将侧分体a从第一人孔伸入水室的第一子腔内,并将该侧分体a插接在中间分体a对应的一侧;然后控制抓手位姿调整机构的动作,使抓手退出水室的第一子腔;b、重复a分步骤,安装另一块侧分体a,即完成低水位组合堵板的安装;高水位组合堵板的安装方法如下:s01,将一次侧堵板多自由度拆装机器人移动到工作位置:a、推动移动小车,将一次侧堵板多自由度拆装机器人移动至水室的第二人孔下方;b、使用扳手分别拧转四组撑地组件的竖向螺杆,使四组撑地组件的撑地底盘均与地面接触,并使车身下端所有的万向轮脱离地面,并使承载板上表面保持水平;s02,放置中间分体b:a、控制抓手位姿调整机构和抓手的动作,夹住中间分体b上的两条定位筋b;b、夹持稳固后,控制抓手位姿调整机构的动作,将中间分体b从第二人孔送入水室的第二子腔内,使其上的光孔对准第二主管道孔边沿处对应的螺栓孔;然后控制抓手位姿调整机构的动作,使抓手退出水室的第二子腔;s03,锁定中间分体b:a、将抓手从安装座上拆卸下来,再将电动螺栓拆装器安装到安装座上;b、控制抓手位姿调整机构的动作,将电动螺栓拆装器从第二人孔送入水室的第二子腔内,并使电动螺栓拆装器垂直于中间分体b的端面,并对准中间分体b的光孔;c、启动电动螺栓拆装器,将螺栓拧入中间分体b上的光孔和水室第二主管道孔边沿处的螺栓孔中,当力矩达到要求时停止拧紧;然后控制抓手位姿调整机构的动作,使电动螺栓拆装器退出水室的第二子腔;s04,放置两块侧分体b:a、将电动螺栓拆装器从安装座上拆卸下来,再将抓手安装到安装座上;b、控制抓手位姿调整机构和抓手的动作,夹住侧分体b上的两条定位筋b;c、夹持稳固后,控制抓手位姿调整机构的动作,将侧分体b从第二人孔送入水室的第二子腔内,将该侧分体b插接在中间分体b对应的一侧,并使其上的光孔对准第二主管道孔边沿处对应的螺栓孔;然后控制抓手位姿调整机构的动作,使抓手退出水室的第二子腔;d、重复b、c步骤,将另一块侧分体b放置到位;s05,锁定两块侧分体b:a、将抓手从安装座上拆卸下来,再将电动螺栓拆装器安装到安装座上;
b、控制抓手位姿调整机构的动作,将电动螺栓拆装器从第二人孔送入水室的第二子腔内,并使电动螺栓拆装器垂直于侧分体b的端面,并对准侧分体b的光孔;c、启动电动螺栓拆装器,将螺栓依次拧入侧分体b上的光孔和水室第二主管道孔的螺栓孔中,当力矩达到要求时停止拧紧,即完成高水位组合堵板的安装。
18.本发明进一步的技术方案是:在低水位组合堵板的安装方法中,抓手的双头气缸的活塞杆a、b同步伸长或同步缩短,进而控制两块夹板之间的夹持区域的宽度,通过两块夹板夹住中间分体a上的两条定位筋a或侧分体a上的两条定位筋a,并使两组锁定柱分别插入中间分体a上的两组定位孔a或侧分体a上的两组定位孔a中,从而保证了夹持稳固不滑脱;在高水位组合堵板的安装方法中,抓手的双头气缸的活塞杆a、b同步伸长或同步缩短,进而控制两块夹板之间的夹持区域的宽度,通过两块夹板夹住中间分体b上的两条定位筋b或侧分体b上的两条定位筋b,并使两组锁定柱分别插入中间分体b上的两组定位孔b或侧分体b上的两组定位孔b中,从而保证了夹持稳固不滑脱。
19.本发明与现有技术相比具有如下优点:1、操作人员在水室外控制一次侧堵板多自由度拆装机器人执行各种动作,即可实现一次侧堵板的安装与拆卸,无需钻入水室内操作,降低了的劳动强度,有效避免了人工拆装一次侧堵板受到的核辐射。
20.2、一次侧堵板多自由度拆装机器人共有10个自由度。移动小车提供了2个自由度,2个自由度分别通过底层纵向轨道与中层滑动架的滑配,中层横向轨道与上层滑动架的滑配来实现。抓手位姿调整机构提供了8个自由度,8个自由度分别通过电动推杆a(一号臂)、电动推杆b(可伸缩支承装置)、转动关节a、转动关节b、转动关节c、转动关节d、转动关节e和转动关节f来实现。通过上述10个自由度,实现了抓手及其夹持部件空间位姿的灵活调整。
21.以下结合图和实施例对本发明作进一步描述。
附图说明
22.图1为本发明的结构示意图;图2为平移驱动机构结构示意图;图3为中层滑动架的结构示意图;图4为图3的俯视图;图5为上层滑动架的结构示意图;图6为图5的右视图;图7为抓手的结构示意及安装位置示意图;图8为低水位组合堵板在俯视视角下的结构示意图;图9为低水位组合堵板在仰视视角下的结构示意图;图10为高水位组合堵板在俯视视角下的结构示意图;图11为高水位组合堵板在仰视视角下的结构示意图;图12为蒸汽发生器下部水室的结构示意图;图13为图12的俯视图。
23.图例说明:车身11;安装平面111;万向轮12;底层纵向轨道21;中层滑动架22;滑块a221;基座板a222;端板223;螺母a224;中层横向轨道23;上层滑动架24;滑块b241;基座板
b242;螺母b243;纵向螺杆25;纵向驱动电机26;横向螺杆27;横向驱动电机28;承载板3;可伸缩支承装置40;壳体b401;伸缩杆b402;一号臂41;转动关节a42;转动关节b43;二号臂44;转动关节c45;三号臂46;转动关节d47;转动关节e48;转动关节f49;双头气缸51;夹板52;锁定柱53;水室7;隔板71,隔板71;第一子腔721;第二子腔722;第一人孔731;第二人孔732;第一主管道孔741;第二主管道孔742;低水位组合堵板91;中间分体a911;侧分体a912;定位筋a913;定位孔a9131;l形挂板914;高水位组合堵板92;中间分体b921;侧分体b922;定位筋b923;定位孔b9231;光孔924;安装座100。
具体实施方式
24.实施例1:如图1-7所示,一次侧堵板多自由度拆装机器人,包括移动小车、平移驱动机构、承载板3、抓手位姿调整机构及抓手。
25.移动小车包括车身11和安装在车身11下端的万向轮12,车身11上端设有安装平面111。
26.平移驱动机构安装在车身11的安装平面111上,并与承载板3关联,用于驱动承载板3在水平面内做纵向或横向移动。平移驱动机构包括底层纵向轨道21、中层滑动架22、中层横向轨道23、上层滑动架24、纵向螺杆25、纵向驱动电机26、横向螺杆27和横向驱动电机28。底层纵向轨道21固定安装在车身11上端的安装平面111上。中层滑动架22滑动安装在底层纵向轨道21上。中层横向轨道23固定安装在中层滑动架22上,并垂直于底层纵向轨道21。上层滑动架24在下端与中层横向轨道23滑动配合,在下端与承载板3固定连接。纵向螺杆25与中层滑动架22螺纹连接,并平行于底层纵向轨道21布置,纵向螺杆25的一端通过轴承和轴承座活动安装在车身11上端的安装平面111上,另一端通过联轴器与纵向驱动电机27的机轴连接。纵向驱动电机26固定安装在车身11上端的安装平面111上。横向螺杆27与上层滑动架24螺纹连接,并平行于中层横向轨道23布置,横向螺杆27的一端通过轴承和轴承座活动安装在中层滑动架22上,另一端通过联轴器与横向驱动电机28的机轴连接。横向驱动电机28固定安装在中层滑动架22上。
27.承载板3与上层滑动架24的上端固接。
28.抓手位姿调整机构安装在承载板3上,并与抓手关联,用于调整抓手在空间中的位姿。抓手位姿调整机构包括多自由度机械臂和可伸缩支承装置。多自由度机械臂包括从后端至前端依次转动连接的一号臂41、转动关节a42、转动关节b43、二号臂44、转动关节c45、三号臂46、转动关节d47、转动关节e48和转动关节f49。一号臂41后端铰接在承载板3上,转动关节f49直接或间接与抓手连接。可伸缩支承装置40下端铰接在承载板3上,上端与一号臂41铰接,可伸缩支承装置40通过伸缩带动一号臂41绕其后端的铰接处转动。
29.抓手包括双头气缸51、夹板52和锁定柱53。双头气缸51包括缸体和从缸体两端伸出的活塞杆a和活塞杆b,双头气缸51的缸体与安装座49固定连接。两个夹板52分别固定连接在活塞杆a和活塞杆b的端头上,并相对布置,两个夹板之间形成夹持区域。两组锁定柱53分别焊固在两块夹板52上,并均位于夹持区域内,锁定柱53与夹板52连接的一端为后端,远离夹板52的一端为前端,锁定柱53整体呈锥台形,锁定柱53从前端至后端直径逐渐扩大。
30.优选,转动关节a42和转动关节b43的转动面相互垂直,转动关节d47和转动关节
e48的转动面相互垂直,转动关节e48和转动关节f49的转动面相互垂直。
31.优选,底层纵向轨道21数量为两条,两条底层纵向轨道21相互平行布置,并分布在车身11的安装平面111的两侧。中层滑动架22包括滑块a221、基座板a222、端板223和螺母a224,两个滑块a221分别固定连接在基座板a222的下端两侧,两个端板223相对布置并固连在基座板a222的两侧,螺母a224固连在基座板a222的下端。中层滑动架22通过螺母a224与纵向螺杆25螺纹连接,通过两个滑块a221分别与两条底层纵向轨道21滑动配合,通过基座板a222的上表面与中层横向轨道23固定连接,通过端板223与横向驱动电机28固定连接。中层横向轨道23的数量为两条,两条中层横向轨道23相互平行布置,并分布在基座板a222的上表面的两侧。上层滑动架24包括滑块b241、基座板b242和螺母b243,两个滑块b241分别固定连接在基座板b242的下端两侧,螺母b243固连在基座板b242的下端。上层滑动架24通过基座板b242的上表面与承载板3固连,通过两个滑块b241分别与两条中层横向轨道23滑动配合,通过螺母b243与横向螺杆27螺纹连接。该结构的优势在于,底层纵向轨道21和中层横向轨道23的数量分别为两条,承重能和稳定性相比单条轨道更好,中层滑动架22和上层滑动架24分别在丝杠螺母副的驱动下做纵向和横向的移动,相比采用气缸、液压缸、电动推杆等驱动结构,丝杠螺母副的移动行程相对更大。
32.优选,移动小车还包括设置在车身11前端两侧和车身11后端两侧的共四组撑地组件。撑地组件包括螺母c13、竖向螺杆14和撑地底盘15。螺母c13焊固在车身11侧边处。竖向螺杆14螺纹连接在螺母c13上,并呈竖直布置。撑地底盘15连接在竖向螺杆14的下端。基于该结构,可实现移动小车移动到指定位置后进行锁定,防止移动小车在地面上滑移,并且,拧动竖向螺杆14即可很方便的对移动小车进行调平或调节重心,有效增加了一次侧堵板多自由度拆装机器人工作时的稳定性和可靠性。
33.优选,可伸缩支承装置40包括电动推杆b。电动推杆b包括壳体b401和伸缩杆b402,伸缩杆b402从壳体b401上端伸出,并相对于壳体b401做直线往复运动。壳体b401的下端与承载板3铰接,伸缩杆b402与电动推杆a的壳体a411铰接,伸缩杆b402通过伸缩带动电动推杆a绕其下端的铰接处转动。
34.优选,一号臂41包括电动推杆a。电动推杆a包括壳体a411和伸缩杆a412,伸缩杆a412从壳体a411上端伸出,并相对于壳体a411做直线往复运动。壳体a411的下端与承载板3铰接,伸缩杆a412与转动关节a45连接。
35.优选,抓手通过安装座100安装在转动关节f49上,安装座100上设有用于连接摄像头(图中未示出摄像头)的安装孔a、用于连接探照灯(图中未示出探照灯)的安装孔b、用于连接抓手的安装孔c和用于连接转动关节f49的安装孔d。
36.本发明提供的一次侧堵板多自由度拆装机器人,用于核电站蒸汽发生器下部水室的一次侧堵板安装和拆卸工作。
37.如图12-13所示,所述水室7内部设有内腔,水室7内腔中设有竖直布置的隔板71,隔板71将水室7内腔分隔为第一子腔721和第二子腔722,水室7下端设有连通至第一子腔721的第一人孔731、连通至第二子腔722的第二人孔732、连通至第一子腔721的第一主管道孔741及连通至第二子腔722的第二主管道孔742,水室7内腔中设有环形凸台和螺栓孔,环形凸台环绕第一主管道孔741的边沿布置,多个螺栓孔环绕第二主管道孔742的边沿布置。
38.如图8-11所示,所述一次侧堵板包括可拆卸安装在水室7第一主管道孔741处的低
水位组合堵板91和可拆卸安装在水室7第二主管道孔742处的高水位组合堵板92。低水位组合堵板91为圆形板,其包括中间分体a911及通过公母插接块活动连接在中间分体a911两侧的侧分体a912,中间分体a911和侧分体a912分别在同一侧端面上设有两条平行布置的定位筋a913,每条定位筋a913上设有一组定位孔a9131,中间分体a911及侧分体a912的侧边处焊固有l形挂板914。高水位组合堵板92为圆形板,其包括中间分体b921及通过公母插接块活动连接在中间分体b921两侧的侧分体b922,中间分体b921和侧分体b922分别在同一侧端面上设有两条平行布置的定位筋b923,每条定位筋b923上设有一组定位孔b9231,中间分体b921和侧分体a912的侧边处分别设有光孔924。
39.低水位组合堵板的安装方法如下:s01,将一次侧堵板多自由度拆装机器人移动到工作位置:a、推动移动小车,将一次侧堵板多自由度拆装机器人移动至水室7的第一人孔731下方;b、使用扳手分别拧转四组撑地组件的竖向螺杆14,使四组撑地组件的撑地底盘15均与地面接触,并使车身11下端所有的万向轮12脱离地面,并使承载板3上表面保持水平。
40.s02,安放中间分体a:a、控制抓手位姿调整机构和抓手的动作,夹住中间分体a911上的两条定位筋a913;b、夹持稳固后,控制抓手位姿调整机构的动作,将中间分体a911从第一人孔731送入水室7的第一子腔721内,并通过l形挂板914挂在第一主管道孔741边沿处的环形凸台上;c、控制抓手位姿调整机构的动作,使抓手退出水室7的第一子腔721。
41.s03,安装两块侧分体a:a、控制抓手位姿调整机构和抓手的动作,夹住其中一块侧分体a912上的两条定位筋a913,夹持稳固后,控制抓手位姿调整机构的动作,将侧分体a912从第一人孔731伸入水室7的第一子腔721内,并将该侧分体a912插接在中间分体a911对应的一侧;然后控制抓手位姿调整机构的动作,使抓手退出水室7的第一子腔721;b、重复a分步骤,安装另一块侧分体a912,即完成低水位组合堵板的安装。
42.低水位组合堵板的拆卸方法为上述安装方法的逆过程。
43.高水位组合堵板的安装方法如下:s01,将一次侧堵板多自由度拆装机器人移动到工作位置:a、推动移动小车,将一次侧堵板多自由度拆装机器人移动至水室7的第二人孔732下方;b、使用扳手分别拧转四组撑地组件的竖向螺杆14,使四组撑地组件的撑地底盘15均与地面接触,并使车身11下端所有的万向轮12脱离地面,并使承载板3上表面保持水平。
44.s02,放置中间分体b:a、控制抓手位姿调整机构和抓手的动作,夹住中间分体b921上的两条定位筋b923;b、夹持稳固后,控制抓手位姿调整机构的动作,将中间分体b921从第二人孔732送入水室7的第二子腔722内,使其上的光孔924对准第二主管道孔742边沿处对应的螺栓孔;然后控制抓手位姿调整机构的动作,使抓手退出水室7的第二子腔722。
45.s03,锁定中间分体b:a、将抓手从安装座100上拆卸下来,再将电动螺栓拆装器安装到安装座100上;b、控制抓手位姿调整机构的动作,将电动螺栓拆装器从第二人孔732送入水室7的第二子腔722内,并使电动螺栓拆装器垂直于中间分体b921的端面,并对准中间分体b921的光孔924;c、启动电动螺栓拆装器,将螺栓拧入中间分体b921上的光孔924和水室7第二主管道孔742边沿处的螺栓孔中,当力矩达到要求时停止拧紧;然后控制抓手位姿调整机构的动作,使电动螺栓拆装器退出水室7的第二子腔722。
46.s04,放置两块侧分体b:a、将电动螺栓拆装器从安装座100上拆卸下来,再将抓手安装到安装座100上;b、控制抓手位姿调整机构和抓手的动作,夹住侧分体b922上的两条定位筋b923;c、夹持稳固后,控制抓手位姿调整机构的动作,将侧分体b922从第二人孔732送入水室7的第二子腔722内,将该侧分体b922插接在中间分体b921对应的一侧,并使其上的光孔924对准第二主管道孔742边沿处对应的螺栓孔;然后控制抓手位姿调整机构的动作,使抓手退出水室7的第二子腔722;d、重复b、c步骤,将另一块侧分体b922放置到位。
47.s05,锁定两块侧分体b:a、将抓手从安装座100上拆卸下来,再将电动螺栓拆装器安装到安装座100上;b、控制抓手位姿调整机构的动作,将电动螺栓拆装器从第二人孔732送入水室7的第二子腔722内,并使电动螺栓拆装器垂直于侧分体b922的端面,并对准侧分体b922的光孔924;c、启动电动螺栓拆装器,将螺栓依次拧入侧分体b922上的光孔924和水室7第二主管道孔742的螺栓孔中,当力矩达到要求时停止拧紧,即完成高水位组合堵板的安装。
48.优选,在低水位组合堵板的安装方法中,抓手的双头气缸51的活塞杆a、b同步伸长或同步缩短,进而控制两块夹板52之间的夹持区域的宽度,通过两块夹板52夹住中间分体a911上的两条定位筋a913或侧分体a912上的两条定位筋a913,并使两组锁定柱分别插入中间分体a911上的两组定位孔a9131或侧分体a912上的两组定位孔a9131中,从而保证了夹持稳固不滑脱。
49.优选,在高水位组合堵板的安装方法中,抓手的双头气缸51的活塞杆a、b同步伸长或同步缩短,进而控制两块夹板52之间的夹持区域的宽度,通过两块夹板52夹住中间分体b921上的两条定位筋b923或侧分体b922上的两条定位筋b923,并使两组锁定柱分别插入中间分体b921上的两组定位孔b9231或侧分体b922上的两组定位孔b9231中,从而保证了夹持稳固不滑脱。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。