技术特征:
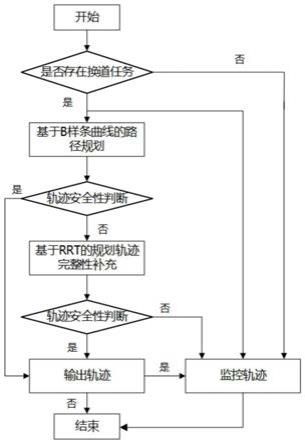
1.一种基于监控策略的无人车换道路径规划方法,其特征在于,包括如下步骤:步骤1:利用环境感知模块得到环境信息和车辆自身状态信息,并根据环境信息和车辆自身状态信息判断是否产生新的换道任务;步骤2:对于产生新的换道任务,则采用基于b样条曲线的方法来规划连续曲率路径;并对基于b样条曲线得到的换道轨迹进行安全性判断;若符合安全性要求,则输出换道轨迹;步骤3:当基于b样条曲线得到的换道轨迹不符合安全性要求,且路径存在时,添加基于快速扩展随机树的算法作为补充算法以获得换道轨迹;并对基于快速扩展随机树的算法获得的换道轨迹进行安全性判断;若符合安全性要求,则输出换道轨迹;步骤4:如果步骤2和步骤3中的换道轨迹规划失败或者不存在换道任务,则输出监控轨迹。2.根据权利要求1所述的一种基于监控策略的无人车换道路径规划方法,其特征在于,步骤2中采用基于b样条曲线的方法来规划连续曲率路径的方法为:步骤2.1换道路径规划可以被定义为换道过程中的两点边值问题:min f(x)s.t.g
i
(x)=1,i=1,...,nh
j
(x)≤0,j=1,...,n其中,f(x)是目标函数,g
i
(x)代表起始点和目标点的约束,h
j
(x)代表安全距离约束,n为起始点和目标点之间的节点数;步骤2.2为了满足车辆转向执行器的限制,生成的路径应该满足连续曲率、峰值曲率和最大曲率的约束。3.根据权利要求2所述的一种基于监控策略的无人车换道路径规划方法,其特征在于,b样条曲线的路径规划两点边值问题可以归结为:b样条曲线的路径规划两点边值问题可以归结为:b样条曲线的路径规划两点边值问题可以归结为:α
min
≤α
i
≤α
max
,i=1,2δ
log-h(l
obs
,v
obs
,l0,l
fba
,v
ego
)≤0δ
lat-h(l
obs
,v
obs
,l0,l1,w,α1,l
fba
,v
ego
)≤0δ
lat-h(l
obs
,v
obs
,l0,l1,l2,w,α1,α2,l
fba
,v
ego
)≤0其中,l
j
为控制段j的长度,j=0、1、2;α
i
是控制点p
i
处的夹角,i=1、2;α
min
、α
max
是夹角α
i
取值的最小值与最大值,k
max
为峰值曲率,代表起始点,x0,y0,v0分别是初始点对应的横坐标,纵坐标,横摆角,车速;代表目标点,x
g
,y
g
,v
g
分别是起始点目标点对应的横坐标,纵坐标,横摆角,车速;x
g
,y
g
,v
g
分别是目标点目标点对应的横坐标,纵坐标,横摆角,δ
log
是纵向安全距离,δ
lat
是横向安全距离,l
obs
是目标车
辆到障碍车辆的距离,v
ego
是自车速度,w是自车宽度,l
fba
是自车从后轴到头部的长度,v
obs
是障碍车辆的车速。4.根据权利要求1所述的一种基于监控策略的无人车换道路径规划方法,其特征在于,步骤3中引入了最近邻域搜索方法减少采样的盲目性,根据欧几里德距离,节点n1是新采样节点n
new
的最近节点;然而,从节点n2到节点n1的转向角更大,导致路径s1和n1连接更为尖锐;为了使路径更利于车辆跟踪,由定义的传统度量函数被修改为式:函数被修改为式:其中,x1,x2分别为1,2节点,d
eu
表示度量函数,x1,x2分别为1,2节点的横坐标,y1,y2分别是1,2节点的纵坐标,θ为n1,n2连接n
new
的夹角。5.根据权利要求1所述的一种基于监控策略的无人车换道路径规划方法,其特征在于,步骤4中输出监控轨迹的方法为:路径规划系统在规划监控轨迹时,如果监控轨迹的减速度为a
x
,则对于直线行驶:其中,a
min
是车辆最小加速度,v0是初始速度,v
g
是目标速度,l
0g
是减速长度。如果转弯半径为r,则对于直线行驶:其中,μ为路面粗糙度;在路径生成后,应根据边界约束,执行器约束和稳定性约束计算速度曲线,如下所示:其中,边界约束即起始速度和目标速度,执行器约束即最大速度和最大加速度,稳定性约束即最大侧向加速度,v
min
、v
max
是速度的最小值和最大值;a
min
、a
max
是加速度的最小值和最大值;a
y
(t)是侧向加速度,a
ymax
是最大侧向加速度。6.根据权利要求1所述的一种基于监控策略的无人车换道路径规划方法,其特征在于,通过控制段与障碍物之间的距离来表示生成路径的安全性检测,将安全性检测表示为:(1)第一个控制段的纵向安全距离:l
obs
v
obs
t
0-(l0 l
fba
)≥δ
log
,t0=l0/v
ego
(2)第二个控制段的横向安全距离:l
obs
v
obc
t
1-l0 (l1 l
fba
)|cosα1| 0.5w|sinα1|≥δ
lat
,t1=l1/v
ego
(3)第三个控制段的横向安全距离:l
obs
v
obs
t
2-(x
2-x1 (l1 l
fba
))sinα
2-0.5w-(d
obs-(y
2-y1))cosα2≥δ
lat
,t2=l2/v
ego
根据自我车辆的位置,存在三个阶段发生碰撞风险,其中需满足各自的安全约束条件;其中,l
obs
是目标车辆到障碍车辆的距离,v
ego
是自车速度,v
obs
是障碍车辆的车速,t0是自车行驶过第一段距离的时间,t1是自车行驶过第二段距离的时间,t2是自车行驶过第二段距离的时间,l
fba
是自车从后轴到头部的长度,w是自车宽度,δlat是横向安全距离,δlog是纵向安全距离,α1是第一控制段与第二控制段间的夹角,α2是第二控制段与第三控制段间的夹角,d
obs
为障碍车辆的形成障碍的宽度,x1,x2分别是车辆在控制点p1,p2的横坐标,y1,y2分别是车辆在控制点p1,p2的纵坐标。7.根据权利要求1所述的一种基于监控策略的无人车换道路径规划方法,其特征在于,所获取的环境信息包括:当前行驶前方障碍物信息、车道宽度、当前传感器检测盲区信息、当前行驶道路侧向障碍物信息;所述车辆自身状态信息包括:车辆速度、转向盘转角、车辆当前位置。8.根据权利要求7所述的一种基于监控策略的无人车换道路径规划方法,其特征在于,所述环境感知模块包括用于获取环境信息的毫米波雷达与ccd工业相机;毫米波雷达设置为4个,其中1个分置在车辆前端保险杆中间位置,另外2个分别放置在两侧的前门和后门之间的中间位置,最后1个放置在车辆的尾部,用于检测车辆四个方向上的障碍物信息并传输给电子控制单ecu;ccd工业相机安装在车辆前挡风玻璃顶部上方,用于将车辆前方的状况传输给电子控制单元ecu。
技术总结
本发明公开了一种基于监控策略的无人车换道路径规划方法,通过环境信息感知模块判断是否产生新的换道任务;如果产生新的换道任务,则采用基于B样条曲线的方法来规划连续曲率路径;当基于B样条的算法没有解决方案但路径存在时,添加基于快速扩展随机树的算法作为补充算法以尽可能地找到路径;如果路径规划失败或者不存在换道任务,则输出监控轨迹;否则输出换道轨迹。本发明可以同时进行换道轨迹规划和监控轨迹规划,保证车辆换道的安全性和稳定性。定性。定性。
技术研发人员:耿国庆 丁鹏程 张佳 李中 杨梁 向华荣 徐亦航 江乐生 苏春 赵文 刘威 江浩斌 施桂强 章国栋 徐惠民 李春
受保护的技术使用者:江苏骄阳转向技术有限公司
技术研发日:2021.10.28
技术公布日:2022/3/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。