1.本发明属于非接触式树径测量技术领域,尤其涉及一种基于三维点云的树径矫正测量方法。
背景技术:
2.在陆地生态系统中,森林系统是主体。同时,森林系统中的丰富资源也是人类所需的最重要的资源之一。能够准确快速地测量森林中单株树木的相关参数对于人类进行可持续森林管理非常重要。传统的获取森林参数的方法主要依靠实地调查。工作量大,效率低,获取参数相对单一,给后续研究带来了一定的局限性。近年来,作为一种先进的遥感技术,激光雷达技术得到了飞速发展。激光雷达可以快速、高效、准确地获取大范围点云数据,且能有效描述森林的结构等信息。由于林场中树木的生长姿态不一,有的树木会倾斜生长,测量的树木直径会有误差,由此可见,获取树木生长姿态,矫正所测树径具有重要的理论意义和实用价值。
技术实现要素:
3.本发明提供了一种基于三维点云的树径矫正测量方法,用三维激光雷达扫描数目后得到点云组成的一比一还原的处于三维直角坐标系中的树木模型。可截取高度z1至z2的点云数据,得到一个圆柱体点云集,如树木倾斜,上下表面皆为椭圆取上下表面的中心点并连接,可得到一条空间直线,求取此直线与轴的夹角,即为树木的倾角,通过计算树木圆柱模型上表面中与中心点距离最大的一点到中心点的距离为未矫正之前的树木直径,该数值乘以立木倾角的余弦值即为正确的树木直径,一种基于三维点云的树径矫正测量方法,其特征在于,包含以下步骤:
4.第一步,用激光雷达获取树木的三维点云,并截取高度z1至z2的点云数据,得到一个圆柱体点云集;
5.第二步,求取上表面圆中心点的坐标,上表面点云的坐标为(xi,yi,z1)i∈ 1,2,
…
,m,上表面圆的中心点坐标o1=(xu,yu,z1),计算方式如下:
[0006][0007]
其中m代表上表面点的数量,xi表示点的x坐标,yi表示点的y坐标,所以 o1=(xu,yu,z1);
[0008]
第三步,求取下表面圆中心点的坐标,下表面点云的坐标为(xj,yj,z2)j∈ 1,2,
…
,n;下表面圆的中心点坐标o2=(xd,yd,z2),计算方式如下:
[0009][0010]
其中n代表下表面点的数量,xj表示点的x坐标,yj表示点的y坐标,所以 o2=(xd,yd,z2);
[0011]
第四步,将上下表面中心点相连得到空间直线a,求取直线与z轴的夹角即为树木
的倾角,上下表面中心点连接线的方向向量与 z轴的夹角,计算方式如下:
[0012][0013]
其中,θ为树木倾角;
[0014]
第五步,求取上表面椭圆长轴r;未矫正之前椭圆长轴长度,上表面点中与中心点距离最大的点,此点与中心点的距离即为椭圆的长轴长度r,计算方法为:
[0015][0016]
其中,m为上表面圆中点的数量;
[0017]
第六步,求取矫正后树径值,即为第五步中椭圆长乘以第四步中树木倾角的余弦值;矫正后树径真实值r,计算方法为:
[0018]
r=r cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0019]
根据如上所述的六个步骤,一种基于三维点云的树径矫正测量方法,其特征在于所述第二、三步骤中的上下表面点云处理方法,其计算方法为:对点云的坐标进行处理,求取上下表面的中心点的坐标;
[0020]
根据如上所述的六个步骤,一种基于三维点云的树径矫正测量方法,其特征在于所述第四步连接上下表面中心点所得直线可以体现树的位姿。其方向向量与z轴的夹角即为树的倾角,其计算方法为计算两向量的夹角;
[0021]
根据如上所述的六个步骤,一种基于三维点云的树径矫正测量方法,其特征在于所述第五步未矫正圆的直径的测量,其计算方法为:计算上表面点中与中心点距离最大的点,此点与中心点的距离即为椭圆的长轴长度;
[0022]
根据如上所述的六个步骤,一种基于三维点云的树径矫正测量方法,其特征在于所述第六步求取真实树径的方法,其计算方法为:将第五步中所得长轴长乘以倾角的余弦值即为矫正后真实树径值。
[0023]
本发明的有益效果在于:通过对复杂多变的树木生长姿态检测,并对直接计算点云得到的有误差的树径值进行矫正。;
[0024]
参照后文的说明和附图,详细公开了本发明的实施方式,指明了本发明的原理可以被采用的方式。应该理解,本发明的实施方式在范围上并不因而受到限制。在所附权利要求的条款范围内,本发明的实施方式包括许多改变、修改和等同。
附图说明
[0025]
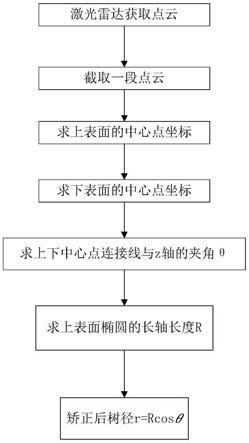
图1为本发明计算过程中的计算流程图。
具体实施方式
[0026]
参照附图,通过下面文本说明书,本发明的前述以及其他的特征将变得明显。在说明书和附图中,具体公开了本发明的特定实施方式,其表明了其中可以采用文本发明的原则部分实施方式,应了解的是,本发明不限于所描述的实施方式,相反,本发明包括落入所
附权利要求的范围内的全部修改、变形以及等同物。参照附图,通过下面文本说明书,本发明的前述以及其他的特征变得明显。在说明书和附图中,具体公开了本发明的特定实施方式,其发明了其中可以采用文本发明的原则,则部分实施方式,应了解的是,本发明不限于所描述的实施方式,相反,本发明包括落入所附权利要求的范围内的全部修改、变形以及等同物。
[0027]
本发明实施例提供一种树径矫正测量方法。图1是本发明实施例的树径矫正测量方法的流程示意图,如图1所示,所述树木矫正测量方法包括:
[0028]
步骤101,用激光雷达获取树木三维点云;
[0029]
步骤102,截取z1到z2之间的树木点云;
[0030]
步骤201,求取上表面圆的中心点坐标o1=(xu,yu,z1),上表面点云的坐标为 (xi,yi,z1)i∈1,2,
…
,m,计算方式如下:
[0031][0032]
其中m代表上表面点的数量,xi表示点的x坐标,yi表示点的y坐标,所以 o1=(xu,yu,z1);
[0033]
步骤301,求取下表面圆的中心点坐标o2=(xd,yd,z2),下表面点云的坐标为 (xj,yj,z2)j∈1,2,
…
,n;计算方式如下:
[0034][0035]
其中n代表下表面点的数量,xj表示点的x坐标,yj表示点的y坐标,所以 o2=(xd,yd,z2);
[0036]
步骤401,求取树木的倾角,即求取上下表面中心点连接线的方向向量步骤401,求取树木的倾角,即求取上下表面中心点连接线的方向向量与z轴的夹角,计算方式如下:
[0037][0038]
其中,θ为树木倾角;
[0039]
步骤501,求取未矫正之前椭圆长轴长度,上表面点中与中心点距离最大的点,此点与中心点的距离即为椭圆的长轴长度r,计算方法为:
[0040][0041]
其中,m为上表面圆中点的数量;
[0042]
步骤601,求矫正后树径真实值r,计算方法为:
[0043]
r=r cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0044]
r即为矫正后树木直径。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
