1.本发明涉及一种仿鹰眼强视力智能感知的目标检测系统及其方法,属于视觉成像技术和仿生技术领域。
背景技术:
2.视觉是一种重要的信息采集系统。由于视觉传感器的低成本和易用性等特点,视觉成像系统已广泛应用于生活中的各个方面,包括监控、工业产品检验、光学测量、无人机、卫星等。然而,目前市场上对视觉系统的设计大多只是简单的图像数据采集上,结构与功能相对单一。简单的工业相机与定焦镜头的组合往往导致视觉系统视场范围有限,图像信息利用率较低,难以同时满足大视场和高精度的要求。搭配变焦镜头虽然可以实现变焦数据采集,但自动变焦系统结构相对复杂,且较难以程序控制,因此,设计一种可以满足多种需求且方便用户操作的智能视觉系统很有必要。
3.鹰眼具有大视场、目光敏锐等显著特点。其特殊的眼部结构和视觉原理决定了鹰可以在复杂环境中发现并捕获弱小目标。因此,对鹰眼的视觉系统结构和视觉原理进行分析,建立鹰眼视觉模型,进而构建仿鹰眼视觉成像装置,并进一步针对鹰眼视觉原理进行模拟,建立了仿鹰眼强视力智能感知的目标检测系统及其方法,具有广阔的应用前景。
技术实现要素:
4.本发明是一种仿鹰眼强视力智能感知的目标检测系统及其方法,旨在提供一种仿鹰眼视觉智能采集处理系统,通过模拟鹰眼视觉系统结构和环境感知机理,采用多路图像采集和图像处理技术,从而使系统同时具有大视场和高分辨率目标检测的功能。它分为机械结构和控制系统两部分;
5.机械结构包括两个定焦工业相机组,模拟鹰眼视觉系统的眼球部分,负责采集图像;二自由度云台,模拟鹰眼视觉系统中的肌肉运动部分,负责运动转动摄像头。
6.下面是定焦工业相机组和二自由度云台的详细介绍。
7.每个定焦工业相机组包含两个相机,即长焦定焦工业相机和短焦定焦工业相机,分别模拟鹰眼视觉系统结构中的正中央凹和侧中央凹,所谓正中央凹和侧中央凹,是鹰眼视觉系统结构中独有的机制,在鹰眼视网膜上存在两个中央凹,分辨率不同,给予了鹰眼视觉系统同时兼顾大视场和高分辨率的功能,现通过发明设计长焦定焦工业相机和短焦定焦工业相机搭配工作的方式来模拟鹰眼正中央凹和侧中央凹工作机制,达到兼顾大视场和高分辨率的功能。
8.两定焦工业相机组,共四个定焦工业相机均位于所述的二自由度云台上,两个定焦相机组平行分布于两侧,每个定焦相机组由一个长焦定焦工业相机和一个短焦定焦工业相机构成,采用共光轴设计,长短焦相机相距较近,在观测远距离物体时视作共光轴。
9.两定焦工业相机组采用两侧对称固定的安装方式,定焦相机组采用固定的短焦镜头,形成较大的视场范围,从而可以获取场景中的大范围信息;定焦相机组的两个长焦工业
相机位于中间区域,形成双目视场范围,从而形成双目视觉结构。
10.所述的二自由度云台,是目标检测系统整体进行俯仰和转向操作的执行机构,由平台上片、平台下片、云台旋转片、俯仰伺服系统及底座构成,二自由度云台带动固定于平台上片的定焦工业相机组执行俯仰和转向操作,平台上片通过桥形固定件及桥形支撑件与平台下层相连;
11.所述俯仰伺服系统包括控制俯仰运动的舵机,摇臂和摇杆,两个控制俯仰运动的舵机对称固定于平台下片下方,摇臂通过摇臂的中心安装孔与所述控制俯仰运动的舵机固定,摇臂为哑铃形碳纤板结构,摇杆对称安装在摇臂的两端,俯仰伺服系统控制固定于平台上片的定焦工业相机组进行俯仰运动;
12.底座为圆筒状结构,控制旋转运动的舵机固定于圆筒状底座内,云台旋转片为圆形碳纤板制成,位于底座上方,云台旋转片中心与控制旋转运动的舵机固定;
13.桥形固定件固定在平台上片下方,并与连接于平台下片上方的桥形支撑件配合连接;
14.其中,l形固定件分两侧对称固定在平台上片下方,每一侧的两个l形固定件分别与两个摇杆相连;
15.所述云台旋转片由底座中控制旋转运动的舵机控制,进行转向运动;
16.平台下片和云台旋转片之间通过连接杆进行固定连接;
17.所述的平台上片、平台下片、云台旋转片均采用碳钎维板制作而成,平台上片下片均为圆角矩形,从而减轻整个装置的重量。
18.上述的l形固定件,桥形支撑件,桥形固定件均采用铝合金材料制作而成。
19.所述二自由度云台控制目标检测系统整体俯仰和转向操作;所有相机通过信号线与控制系统的图像处理单元相连,采集的多路图像经过图像处理单元处理,图像处理单元可根据用户需求进行功能设计,完成特定的视觉处理任务,并通过控制系统对二自由度云台结构下发指令,进而对镜头光轴方向进行控制,从而切换到检测的合适视场。
20.所述的控制系统包括图像处理单元、舵机控制单元和电源单元;所述电源单元为整个硬件系统提供电源,图像处理单元负责采集多路的工业相机图像,并进行相应的处理,根据处理结果,对舵机控制单元输出控制指令;舵机控制单元从图像处理单元接收控制信号,控制二自由度云台中的三个舵机(两个控制俯仰运动的舵机及一个控制旋转运动的舵机),将仿鹰眼光学结构部分对准疑似目标物。
21.上述工业相机的工作模式可以进行组合配置,两侧的短定焦工业相机形成两侧视场,两个视场可覆盖大范围场景,从而可在大范围场景中捕获疑似目标;图像处理单元利用大场景信息和设定任务来调度舵机控制系统,控制云台转动使得疑似目标在视场中央,切换处理长焦镜头采集的图像,对于疑似目标细节进行检测和识别,确认疑似目标是否为真实目标。当可疑目标距离较远时,切换为短焦镜头,进入大场景模式,以有效跟踪目标,当可疑目标距离较近时,则切换为长焦镜头,进入双目视觉测量模式,组成立体视觉从而对目标的更多信息进行捕获和精确测量。
22.上述图像处理单元可对获取的多路图像进行整合输出,根据用户配置,可将多路图像整合成一个大场景图像用于人机交互功能,用户可以通过图像处理单元的视频输出接口和网络接口进行图像显示和远程访问。
23.一种仿鹰眼强视力智能感知的目标检测方法,具体步骤如下:
24.(1)图像处理单元控制镜头采集通道的开关,关闭对长焦镜头采集图像通道,仅收集处理两短焦镜头采集的图像,进入大场景模式,两侧短焦定焦工业相机形成两侧视场,从而两个视场拼接为一个大视场,用于大场景的实时监控,此时针对的目标为距离较远的目标,采集的图像经过图像处理单元处理后,采用显著性计算检测场景中的可疑目标;
25.(2)当场景中发现可疑目标后,利用标定相关数据,计算可疑目标在大场景中的图像坐标,进而计算可疑目标相对于整体平台中心的方位参数,舵机控制单元根据疑似目标的方位参数控制二自由度云台中的两个舵机,将一侧的定焦相机组对准可疑目标,使得疑似目标位于视场正中央;
26.(3)通过图像处理单元控制镜头采集通道的开关,切换采集处理上述步骤中长焦镜头通道,进入目标精细检测模式,对目标进行进一步的精细分析,采集疑似目标高分辨率图像,通过视觉算法检测疑似目标是否为真实目标。
27.本发明优点及功效在于:
28.采用仿鹰眼视觉智能采集处理系统装置,可以保证视觉系统既可以大范围监控场景,对可疑目标进行检测和定位,又可以进行高分辨率进行分析和测量,可克服单一相机的精度和视场范围相互矛盾的缺陷,目标检测效率明显提高,适用范围更广。为装置加入控制系统,通过程序设定可以使系统自动检测可疑目标并进行分辨率变换,人机交互功能可方便用户根据需要进行远程监控和控制,并可以很好地拓展仿鹰眼视觉成像装置的应用范围。
附图说明
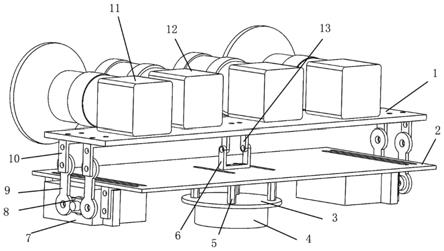
29.图1仿鹰眼强视力智能感知的目标检测系统装置结构示意图
30.图2上层结构示意图
31.图3下层结构示意图
32.图4仿鹰眼强视力智能感知的目标检测系统及其方法框架图图
33.图5仿鹰眼强视力智能感知的目标检测系统控制方法流程图
34.图中标号说明如下:
35.1、平台上片
ꢀꢀꢀꢀꢀ
2、平台下片
ꢀꢀꢀꢀꢀ
3、云台旋转片
ꢀꢀꢀꢀꢀ
4、底座
36.5、连接杆
ꢀꢀꢀꢀꢀꢀꢀ
6、桥形支撑件
ꢀꢀꢀ
7、舵机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8、摇臂
37.9、摇杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10、l形固定件
ꢀꢀꢀ
11、短焦工业相机
ꢀꢀ
12、长焦工业相机
38.13、桥形固定件
具体实施方式
39.请参阅图1—4所示,本发明为一种仿鹰眼强视力智能感知的目标检测系统装置,它分为机械结构和控制系统两部分。机械结构采用经典的分层式左右对称结构,整体可分为上层光学结构和下层云台控制结构,使其具备伺服控制功能。
40.机械结构包括两个长焦定焦工业相机12,两个短焦定焦工业相机11,二自由度云台;所述四个定焦工业相机均固定于平台上片1上,两个短焦定焦相机平行分布于两侧,两个长焦定焦工业相机位于中间;上层光学结构通过平台上片1及l形固定件与下层云台控制
结构相连;二自由度云台由平台上片1、平台下片2、云台旋转片3、俯仰伺服系统及底座构成,控制上层光学结构进行俯仰和转向操作;俯仰伺服系统包括舵机7,摇臂8和摇杆9,控制平台进行俯仰运动,云台旋转片3由底座4中的舵机控制进行转向运动;平台上片2和云台旋转片3之间通过连接杆5进行固定连接;平台上片1通过桥形支撑件13、桥形固定件6与平台下片2连接,使上层光学结构进行俯仰运动时旋转轴保持固定位置;所有相机通过信号线与图像处理单元相连,采集的多路图像经过图像处理单元处理,图像处理单元可根据用户需求进行功能设计,完成特定的视觉处理任务,并通过控制系统对云台运动进行控制,从而切换到相应任务的镜头。
41.上述的平台上片1、平台下片2、云台旋转片均采用碳纤维板制作而成,从而减轻整个装置的重量。上述的l形支撑件10、桥形支撑件6及桥形固定件13均采用铝合金材料制作而成。
42.上述的两个短焦定焦工业相机11采用两侧对称固定的安装方式,采用固定的短焦镜头,形成两侧较大的视场范围,从而可以获取场景中的大范围信息;两个长焦定焦工业相机12位于中间区域,形成双目视场范围,从而形成双目视觉结构。
43.控制系统包括图像处理单元、舵机控制单元和电源单元;所述电源单元为整个硬件系统提供电源,图像处理单元负责采集多路的工业相机图像,并进行相应的处理;舵机控制单元从图像处理单元接收控制信号,用于控制二自由度云台中的舵机。
44.上述工业相机的工作模式可以进行组合配置,两侧的短定焦工业相机形成两侧视场,两个视场可覆盖大范围场景,从而可在大范围场景中捕获疑似目标;图像处理单元利用大场景信息和设定任务来调度舵机控制系统,控制云台转动使得疑似目标在视场中央,切换处理长焦镜头采集的图像,对于疑似目标细节进行检测和识别,确认疑似目标是否为真实目标。当可疑目标距离较远时,切换为短焦镜头,进入大场景模式,以有效跟踪目标,当可疑目标距离较近时,则切换为长焦镜头,进入双目视觉测量模式,组成立体视觉从而对目标的更多信息进行捕获和精确测量。
45.上述图像处理单元可对获取的多路图像进行整合输出,根据用户配置,可将多路图像整合成一个大场景图像用于人机交互功能,用户可以通过图像处理单元的视频输出接口和网络接口进行图像显示和远程访问。
46.具体工作步骤如下:
47.(1)在所有任务工作开始之前,对各定焦镜头进行标定,记录相关参数用于镜头坐标系向世界坐标系转换使用;电源单元开始向各部分给电,准备开始执行目标检测任务。
48.(2)关闭长焦镜头采集图像通道,仅接收短焦镜头采集到的相关图像处理短焦镜头图像。
49.(3)进行显著性检测,标记框选疑似目标位置。
50.(4)判断是否有疑似目标,若无,则进行步骤(5)。若存在,则依次进行步骤(6)及之后的步骤。
51.(5)利用步骤(1)中标定的相关参数,计算短焦镜头下一个视场的偏角,换算为整体目标检测系统偏角,向舵机控制单元输出控制指令,舵机控制单元接收控制指令并解算,输出俯仰偏航偏移量,使控制俯仰运动的舵机及控制偏航运动的舵机转动完成后,执行步骤(2)。
52.(6)图像中存在疑似目标,通过标定的相关参数,计算疑似目标相对于图像中的图像坐标,得到相关图像坐标后,进一步计算疑似目标相对镜头的真实相对偏角。
53.(7)利用步骤(1)中标定的相关参数,将步骤(6)中的相对镜头的真实相对偏角,换算为整体目标检测系统偏角,向舵机控制单元输出控制指令,舵机控制单元接收指控指令并解算,输出俯仰偏航偏移量,使控制俯仰运动的舵机及控制偏航运动的舵机转动完成后,关闭短焦镜头采集通道,开启长焦镜头采集通道,采集高分辨率图像,对步骤(3)中框选的疑似目标进行精细分析。
54.(8)判断是否检测为真正目标,若否,则进行步骤(9);若为真正目标,则记录目标相关信息,通过镜头标定的相关参数,计算转换出真正目标的世界坐标位置,工作结束。
55.(9)根据步骤(7)中俯仰偏航偏移量,向舵机控制单元输出控制指令,舵机控制单元接收控制指令并解算,输出俯仰偏航偏移量,使控制俯仰运动的舵机及控制偏航运动的舵机转动完成后,关闭长焦镜头采集图像通道,仅处理短焦镜头图像,将步骤(3)的框选位置排除,进行显著性检测。
56.(10)判断是否有疑似目标,若否,则进行步骤(5);若有,则进行步骤(6)。
57.采用仿鹰眼强视力智能感知的目标检测系统装置,可以保证视觉系统既可以大范围监控场景,对可疑目标进行检测和定位,又可以进行高分辨率进行分析和测量,可克服单一相机的精度和视场范围相互矛盾的缺陷,目标检测效率明显提高,适用范围更广。为装置加入控制系统,通过程序设定可以使系统自动检测可疑目标并进行分辨率变换,人机交互功能可方便用户根据需要进行远程监控和控制,并可以很好地拓展仿鹰眼视觉成像装置的应用范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
