1.本发明涉及视频压缩编码与图像处理领域,主要应用于视频编码系统中的视频前处理过程,具体涉及一种自适应的导向滤波算法。
背景技术:
2.近年来,流媒体领域飞速发展,短视频,高清影视等视频媒体成为人们日常生活中主要的娱乐消遣方式,人们日益增长的视频需求也对流媒体服务端的存储带来了沉重的压力,由于视频拍摄环境、视频拍摄设备等不稳定因素的存在,视频中噪声的加入是难以避免的,在进行视频编码过程中,视频中人眼难以察觉的高频信息(噪声为主)会对编码器编码效率产生较大的影响,造成编码视频体积上升,编码效果不理想等问题。因此视频编码的一大关键技术是将视频的一些高频冗余信息去滤除,从而达到提升视频编码效率的目的。
3.在对视频的高频冗余信息进行滤除时,传统的滤波方法如高斯滤波、中值滤波等滤波算法在滤波时往往会对画面内容造成较大的损害,并造成视频psnr(峰值信噪比)质量指标的严重下降,进而导致视频编码效率急剧下降,而滤波效果比较好的bm3d算法与各向异性滤波算法常因为过高的运算复杂度而不适用于视频编码系统。
4.一种兼顾运算复杂度以及滤波效果的滤波算法导向滤波算法常用于图像处理领域,并且取得了十分优越的效果,其函数表达式可表示为:
[0005][0006]
其中:
[0007][0008]ii
为输入像素灰度值,qi为输出像素灰度值,ak和βk为导向滤波系数,ωk为ii所在的滑动窗口,其中是像素所在窗口方差,∈是正则化参数,是像素所在窗口均值。
[0009][0010][0011]
φ为窗口ωk的大小,在求得导向滤波参数后,对于像素ii,在别的像素窗口中也会被包含,因此,一个像素点可以看作是多个系数ak和βk的表示,对于窗口中的所有像素点的正则化参数∈进行平均得到当前所处理像素的平均正则化参数值,带入公式(2)、(3)求得正则化参数∈进行平均得到当前所处理像素的平均正则化参数值,带入公式(2)、(3)求得
[0012]
上述的导向滤波函数计算公式在图片或者静态图像上有比较好的效果,在对图片滤波处理时,正则化系数∈为设定的固定值,但对于视频滤波,固定的正则化参数并不能对视频每一帧的画面进行足够稳定的滤波处理,如因为滤波效果不稳定所导致的运动拖影,边缘模糊等问题。
技术实现要素:
[0013]
本发明提供了一种基于导向滤波器的自适应滤波方法,根据输入视频能够对待处理像素点周围的像素进行分析,结合视频内容复杂程度以及视频帧间的变化情况,推算出最佳导向滤波函数,从而能够进行自适应滤波和提升视频编码效率的目的。
[0014]
本发明采用的技术方案为一种基于导向滤波器的自适应滤波方法,具体实施步骤如下:
[0015]
对于视频序列的第一帧,由于缺少参考的前向帧,我们采用固定正则化参数的方法对其进行滤波,下面以第二帧中像素i的滤波处理方法为例进行步骤描述
[0016]
(1)计算像素i的梯度值v、像素i所在滑动窗口w2i与前向参考帧窗口w1i的结构相似度s。
[0017]
(2)根据梯度v和结构相似度s的大小,判断正则化参数的计算方式,计算得出正则化参数。
[0018]
(3)根据导向滤波函数公式,依次求得滑动窗口ωe内其他像素的正则化参数,重复步骤1)、2)操作,获得平均正则化参数并依此构建导向滤波系数计算公式。
[0019]
(4)根据导向滤波函数,获得滤波后的像素灰度值qi。
[0020]
(5)对视频帧中每个像素执行上述步骤,获得自适应滤波视频。
[0021]
所述步骤(1)中在计算梯度值大小v和结构相似度s时,设置一个以像素i为中心的窗口wni(n为帧序号),对于结构相似度,其前向参考帧设置为(w(n-1))i,此外,对于结构相似度s可参考后续视频帧窗口(w(n k))i,但从视频编码计算复杂度考虑,总参考帧不超过3帧,并且包含前向参考帧窗口(w(n-1))i。
[0022]
所述步骤(2)中判断正则化参数的计算方式,对于结构相似度s,当该窗口与相邻帧窗口之间的结构相似度发生较大变化时,即s的数值小于阈值s
min
时(s
min
=0.8),则设置固定的正则化参数(∈=1~4),并且跳出当前步骤,计算下一像素正则化参数值。
[0023]
所述步骤(2)中判断正则化参数的计算方式,对于梯度值大小v,考虑当前像素邻域窗口w2i中梯度v是否过大,如梯度过大则认为在此区域是需要保留的边缘区域,如果梯度过小则认为此区域为平滑区域,若两者中一项成立则设定固定的正则化参数,并且跳出当前步骤,计算下一像素正则化参数值。
[0024]
所述步骤(2)中判断正则化参数的计算方式,当梯度大小v和结构相似度s都在设定的阈值范围,采用正则化函数的计算方法,正则化函数的公式如下:
[0025][0026]
为梯度与结构相似度对正则化参数的常系数,在像素i的邻域窗口w2i中,通过梯度大小v可以描述该范围内的梯度,以便更好地保留边缘信息;通过前后帧视频的结构相似度s可以计算出帧间画面信息的变化幅度,给予变化较大的视频帧区域更多的细节保留,对于相似的画面则可以稍微增加滤波强度,从视频编码的角度,v和s对视频编码效率的贡献不一,因此需要对他们分配不同的权重。
[0027]
所述步骤(3)中对ωk中所有像素进行正则化参数计算时,ωk为导向滤波函数设置的滑动窗口,在本发明中其模板设置为3x3,在对像素i进行滤波处理时,需求出ωk内所有像素的正则化参数,将其平均值带入公式(2)、(3)得出导向滤波平均系数构建自适应的导向滤波公式,在步骤4)中计算的出当前像素的滤波值。
[0028]
与现有技术相比,本发明具有下述优点:
[0029]
1.根据画面时域和空间域两个维度对像素所在区域进行判断,能够对视频不同区域进行更精确的滤波操作,由于画面内容的丰富性以及画面运动主体的不确定性,对画面进行分区域滤波将得到更高质量的去噪视频。
[0030]
2.由于该算法在计算正则化参数时考虑到了对视频编码的影响权重,因此能够在不影响主观质量的同时完成去噪,对视频编码效率有着明显的提升作用。
[0031]
3.该算法能够与盒式滤波器一并使用,能够在不影响滤波效果的前提下,大大提升了滤波的运算速度。
附图说明
[0032]
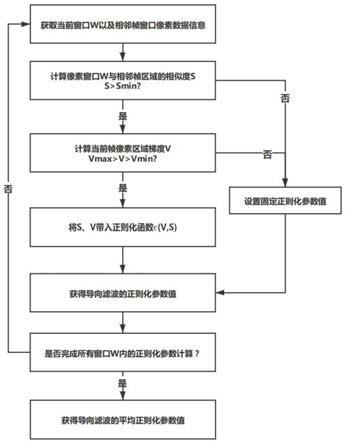
图1为本发明自适应适配编码前置滤波方法的基本流程示意图。
具体实施方式
[0033]
以下结合附图和实施例对本发明进行详细说明。
[0034]
本方法实施参照导向滤波函数,公式如下:
[0035][0036]
其中:
[0037][0038]ii
为输入像素灰度值,qi为输出像素灰度值,ak和βk为导向滤波系数,ωk为ii所在的滑动窗口,其中是像素所在滑动窗口方差,∈是正则化参数,是像素所在滑动窗口均值。
[0039][0040][0041]
φ为窗口ωk的大小,在求得导向滤波参数后,对于像素ii,在别的像素窗口中也会被包含,因此,一个像素点可以看作是多个系数ak和βk的表示,我们对于窗口中所有像素点所对应的正则化参数值∈进行平均得到当前所处理像素的平均正则化参数,带入公式(2)、(3),求出
[0042]
求导向滤波系数的关键参数为正则化参数∈,其决定了滤波程度大小,本发明通过视频空间域和时间域两个维度分别进行自适应获取正则化参数值从而调整去噪滤波的强度等级,步骤流程如图1所示。
[0043]
1.在计算结构相似度s时,设置一个以像素i为中心的窗口wi,结构相似度计算采用ssim结构相似度算法进行计算,如果当前窗口结构相似度小于设定的s的最大阈值(0.8),则跳过当前像素窗口的梯度v的计算,直接得到该像素的固定正则化参数值,此处的正则化参数的固定值设置在1~4范围内效果达到最优。当结构相似度s的大小满足阈值范围(s》0.8)时,进行像素窗口wi的梯度值计算。
[0044]
2.在计算像素区域窗口梯度时,我们使用sobel算子在窗口wi上分别算出x、y方向
的梯度大小,按照梯度的方向性获得当前像素i的梯度值大小v,当画面为比较平滑的区域(v《10),采用较大的正则化参数,增强滤波效果,当计算梯度值较大,代表当边缘较为明显区域时(v》40),则设置为较小的正则化参数,减小滤波程度。对于梯度大小v和正则化参数的关系可由算式(6)表示:
[0045]
∈(v)=100v-2
ꢀꢀ
(6)
[0046]
由此,阈值在v《10以及v》40的情况都可直接通过算式得到该像素的固定正则化参数值。
[0047]
3.当梯度大小v和结构相似度s都在给定的阈值范围内(10《v《40,s》0.8),正则化参数需要通过正则化函数∈(v,s)求出,函数表达式:
[0048][0049]
其中ω分别是v和s的权重系数,其代表对于编码器而言梯度分量和相似度分量对编码器的权值,ω定义为0.4和0.6,得到正则化参数。
[0050]
4.前面步骤是单个像素正则化参数的计算流程,ωk为导向滤波函数设置的滑动窗口,在本发明中将其设置为3x3的固定模板,且在此模板下视频编码效果最佳。在求得ωk中所有像素值的正则化系数后求均值,获得平均的导向滤波系数将其作为导向滤波函数的系数值,构建当前所处理像素的导向滤波函数。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
