技术特征:
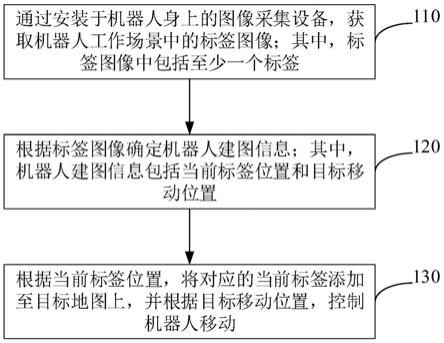
1.一种建图方法,其特征在于,包括:通过安装于机器人身上的图像采集设备,获取机器人工作场景中的标签图像;其中,所述标签图像中包括至少一个标签;根据所述标签图像确定机器人建图信息;其中,所述机器人建图信息包括当前标签位置和目标移动位置;根据所述当前标签位置,将对应的当前标签添加至目标地图上,并根据所述目标移动位置,控制所述机器人移动。2.根据权利要求1所述的方法,其特征在于,在通过安装于机器人身上的图像采集设备,获取机器人工作场景中的标签图像之前,还包括:在将标签设置于机器人工作环境之前,通过标签扫描设备,获取标签的预存标签信息;其中,所述预存标签信息包括标签编码,和/或,标签点排列方式;将所述预存标签信息和标签扫描顺序进行关联存储。3.根据权利要求2所述的方法,其特征在于,根据所述标签图像确定机器人建图信息,包括:识别所述标签图像,获取当前标签位置和当前标签信息;其中,所述当前标签信息包括当前标签编码,和/或,当前标签点排列方式;确定当前标签的识别顺序。4.根据权利要求3所述的方法,其特征在于,根据所述当前标签位置,将对应的当前标签添加至目标地图上,包括:判断所述当前标签信息是否存在于所述预存标签信息中;若是,则根据所述预存标签信息,确定所述当前标签的标签扫描顺序;判断所述当前标签的识别顺序和所述标签扫描顺序是否一致;若是,则根据所述当前标签位置,将所述当前标签以预设的第一图标添加至目标地图上。5.根据权利要求4所述的方法,其特征在于,在判断所述当前标签的识别顺序和所述标签扫描顺序是否一致之后,还包括:若否,则根据所述当前标签位置,将所述当前标签以预设的第二图标添加至目标地图上;记录第二图标的标签数量,判断所述第二图标的标签数量是否满足预设的提醒条件;若是,则发出提醒信息。6.根据权利要求3所述的方法,其特征在于,标签中包括至少一个红外反光材料的标签点;根据所述标签图像确定机器人建图信息,还包括:根据预设的红外识别算法,判断所述标签图像中是否存在除当前标签位置之外的其他反射位置;若是,则将该位置确定为机器人的目标移动位置。7.根据权利要求6所述的方法,其特征在于,若否,则在根据所述当前标签位置,将对应的当前标签添加至目标地图上之后,还包括:控制所述机器人移动至预设的结束位置,发出建图结束信息。8.根据权利要求1所述的方法,其特征在于,在根据所述目标移动位置,控制所述机器
人移动之后,还包括:判断所述机器人是否到达所述目标移动位置,若是,则执行所述通过安装于机器人身上的图像采集设备,获取机器人工作场景中的标签图像。9.一种建图装置,其特征在于,包括:标签图像获取模块,用于通过安装于机器人身上的图像采集设备,获取机器人工作场景中的标签图像;其中,所述标签图像中包括至少一个标签;建图信息确定模块,用于根据所述标签图像确定机器人建图信息;其中,所述机器人建图信息包括当前标签位置和目标移动位置;标签添加模块,用于根据所述当前标签位置,将对应的当前标签添加至目标地图上,并根据所述目标移动位置,控制所述机器人移动。10.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-8中任一所述的建图方法。11.一种机器人,其特征在于,所述机器人设置有如权利要求10所述的电子设备。12.一种包含计算机可执行指令的存储介质,其特征在于,所述计算机可执行指令在由计算机处理器执行时用于执行如权利要求1-8中任一所述的建图方法。
技术总结
本发明实施例公开了一种建图方法、装置、电子设备、机器人及存储介质。其中,该方法包括:通过安装于机器人身上的图像采集设备,获取机器人工作场景中的标签图像;其中,所述标签图像中包括至少一个标签;根据所述标签图像确定机器人建图信息;其中,所述机器人建图信息包括当前标签位置和目标移动位置;根据所述当前标签位置,将对应的当前标签添加至目标地图上,并根据所述目标移动位置,控制所述机器人移动。实现了机器人不依赖人力,自动前往下一个标签位置并添加标签,提高建图效率。提高建图效率。提高建图效率。
技术研发人员:张飞 万永辉 李通
受保护的技术使用者:上海擎朗智能科技有限公司
技术研发日:2021.11.16
技术公布日:2022/3/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。