1.本发明属于光谱探测领域,具体涉及一种无人机载化学气体红外探测系统。
背景技术:
2.传统的机载“线源”式气体探测仪,在监测地面气体分布的应用场合,必须做空间的二维扫描,需要的滞空时间太长。而传统“面源”式红外成像光谱仪采用的是时间调制红外干涉光谱成像技术,时间调制型光谱成像仪是机械扫描的单点红外傅立叶光谱技术,需要一套高精度的动镜系统,其结构特征导致系统的抗震性很差,目前只能在平台静止的实验室条件下使用,难以承受空中悬停这样剧烈的振动环境,不适合用于高空间分辨率的光谱成像。另外,采样速度完全依赖于动镜的机械扫描速率,系统的响应速度低,不适合用于测量大面积运动或瞬变的目标光谱。
技术实现要素:
3.本发明要解决的技术问题是如何克服上述现有技术不足,提供一种无人机载化学气体红外探测系统,实现低空探测化学气体的种类和空间分布。
4.本发明解决实际上问题所采用的技术方案:
5.一种无人机载化学气体红外探测系统,该系统通过地面控制站控制无人机飞抵目标监测地域,当抵达目的地的化学监测载荷巡航中发现可疑云团后转入悬停,进行地面或空中气体云团光谱图像监测,通过视频观察装置采集视频图像,机上数据并行综合处理后将化学监测信息和图像信息叠加,经无线传输到达地面控制站,由地面控制站进行数据融合和界面图形显示。
6.本发明的无人机载化学监测系统主要包括红外光谱成像化学监测载荷、三轴机载稳定平台、数据图像采集与无线传输设备、在线定标装置、载荷电源系统、并行数据处理器、地面控制站和无人直升机平台。
7.所述红外光谱成像化学监测载荷挂载于三轴机载稳定平台后再挂载在无人直升机平台上,所述数据图像采集与无线传输设备、在线定标装置、载荷电源系统、并行数据处理器均挂载在无人直升机平台上。
8.所述三轴机载稳定平台通过rs422控制红外光谱成像化学监测载荷的位置状态,红外光谱成像化学监测载荷将采集到的实时光谱图像信息以sdi数据格式传递到并行数据处理器,并行数据处理器将处理好的图像数据以sdi格式,其余信息数据以rs422方式传递到数据图像采集与无线传输设备,数据图像采集与无线传输设备以无线传输的方式将这些数据传到地面控制站。
9.所述地面控制站也可发送控制信息到数据图像采集与无线传输设备,再以rs422方式与无人机平台通信以控制无人直升机平台,与三轴机载稳定平台通信再以rs422方式控制红外光谱成像化学监测载荷的位置状态,与并行数据处理器通信以rs422方式控制在线定标装置,从而实现本发明的完整功能闭环。
10.所述红外光谱成像化学监测载荷,可实现时空调制的红外光谱图像获取。
11.所述三轴机载稳定平台可以有效减小监测过程中冲击、振动、气流扰动对系统的影响,保持光谱仪姿态在惯性空间的稳定,并有效地提高系统的光轴稳定性。
12.所述数据图像采集与无线传输设备,能够采集机上载荷实采到的图像信息和机上数据信息,接收地面控制站发送的控制数据信息,实现机载平台与地面控制站的信息交互。
13.所述在线定标装置,既能实现两点辐射定标功能,还能够确保无人机载光谱仪光谱辐射定标的精度。
14.所述载荷电源系统,为机上各载荷供电。
15.所述并行数据处理器实现高速处理化学监测数据、视像监测数据、定位和测高信息的数据处理和信息融合,并存储化学污染信息。
16.所述地面控制站,主要用于安装无人机控制设备,对无人机载化学气体监测系统的工作状态进行控制,并接收无人机采集的数据进行数据融合和界面图形显示。
17.本发明的工作原理:
18.针对现有技术的不足,本发明采用时间空间调制的方式采集光谱数据,同时还为红外光谱成像化学监测载荷增加三轴机载稳定平台,解决了传统“面源”式红外成像光谱仪抗震性差、低响应速度、不适用于机载环境等问题。
19.地面输运车辆运载无人机来到化学事故区域附近,使用载荷电源系统为机上各载荷供电并启动各载荷。由地面控制站控制无人机飞抵目标监测地域,在巡航过程中由红外光谱成像化学监测载荷将采集的图像信息经数据图像采集与无线传输设备传回地面控制站,当地面控制站发现可疑云团后发送控制信息,无人机上的图像信息经数据图像采集与无线传输设备接收到地面控制站信息后转入悬停,由于无人机悬停过程并不处于稳定状态,此时需要机上的三轴机载稳定平台为红外光谱成像化学监测载荷提供相对稳定的环境。
20.接着使用在线定标装置为红外光谱成像化学监测载荷进行辐射定标,定标完后才可再进行地面或空中气体云团监测。然后,红外光谱成像化学监测载荷采集可疑云团光谱数据,其中的并行处理器实时高速处理化学监测数据、视像监测数据、定位和测高信息的数据处理和信息融合,并存储化学污染信息。处理后的图像及数据信息经数据图像采集与无线传输设备传输到达地面控制站,最后由地面控制站对可疑云团的监测结果、范围及扩散情况进行显示和机上红外光谱成像化学监测载荷的控制。
21.本发明的有益效果:
22.本发明的无人机载化学气体红外探测系统是一种能实现远距离、大面积实时监测化学气体扩散和分布情况的面源式遥测报警系统,可实现对化学气体的早发现、早报警、早预防,减少化学气体的伤害效能。该系统可安置在重要的首脑机关、广场、地铁等公众场合,在反恐、社会安全保障领域发挥重要作用。在控制大气排放、大气污染、环境监测,煤矿瓦斯安全监测等民用领域也具有广阔的应用前景。
23.结合时间空间调制干涉光谱成像仪特点,将时间空间调制干涉光谱成像仪安装在无人机载平台,可实现无人机载平台上的景物和目标的红外光谱图像获取,识别特定目标气体的种类,通过无线传输可在地面控制站的显控器上显示目标景物的可见光图像或红外图像以及特定气体与背景的空间分布。无人机载化学气体遥测结果图像显示,本发明的系
统具有良好的响应速度,完全适合用于测量大面积运动或瞬变的目标光谱并对化学气体进行监测。
附图说明
24.图1:本发明的无人机载化学气体红外探测系统的组成框图。
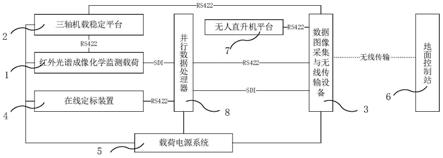
25.图2:本发明的无人机载化学气体红外探测系统各组成部分的连接示意。
26.图3:本发明的遥测图像处理结果示意图。
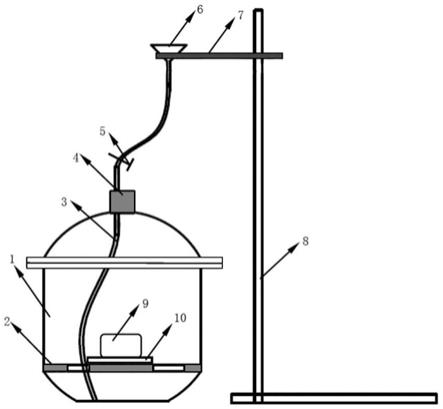
27.图4:本发明的无人机载化学气体探测系统的工作过程示意图。
28.图5:本发明的无人机载化学气体红外探测系统的地面控制站对采集的数据进行处理、显示和气体鉴别的界面显示图。
29.图中:1-红外光谱成像化学监测载荷,2-三轴机载稳定平台,3-数据图像采集与无线传输设备,4-在线定标装置,5-载荷电源系统,6-地面控制站,7-无人直升机平台,8-并行数据处理器。
具体实施方式
30.为使本发明的目的、内容、和优点更加清楚,下面结合附图和实施实例,对本发明的具体实施方式作进一步详细描述。
31.如图1所示,本发明的无人机载化学气体探测系统主要由红外光谱成像化学监测载荷1、三轴机载稳定平台2、数据图像采集与无线传输设备3、在线定标装置4、载荷电源系统5、并行数据处理器8、地面控制站6和无人直升机平台7等组成。
32.所述无人直升机平台7搭载有红外光谱成像化学监测载荷1、三轴机载稳定平台2、数据图像采集与无线传输设备3、在线定标装置4、并行数据处理器8及载荷电源系统5。
33.所述红外光谱成像化学监测载荷1挂载于三轴机载稳定平台2后再挂载在无人直升机平台7上,所述数据图像采集与无线传输设备3、在线定标装置4、载荷电源系统5、并行数据处理器8均挂载在无人直升机平台7上。
34.如图2所示,三轴机载稳定平台2通过rs422控制红外光谱成像化学监测载荷1的位置状态,红外光谱成像化学监测载荷1将采集到的实时光谱图像信息以sdi数据格式传递到并行数据处理器8,并行数据处理器8将处理好的图像数据以sdi格式、其余信息数据以rs422方式传递到数据图像采集与无线传输设备3,数据图像采集与无线传输设备3以无线传输的方式将这些数据传到地面控制站6。
35.所述地面控制站6也可发送控制信息到数据图像采集与无线传输设备3,再以rs422方式与无人机平台7通信以控制无人直升机平台7,与三轴机载稳定平台2通信再以rs422方式控制红外光谱成像化学监测载荷1的位置状态,与并行数据处理器8通信以rs422方式控制在线定标装置4,从而实现本发明的完整功能闭环。
36.所述红外光谱成像化学监测载荷1可实现时空调制的红外光谱图像获取。
37.所述三轴机载稳定平台2可以有效减小监测过程中冲击、振动、气流扰动对系统的影响,保持光谱仪姿态在惯性空间的稳定,并有效地提高系统的光轴稳定性。
38.所述数据图像采集与无线传输设备3用于采集机上红外光谱成像化学监测载荷1实采到的图像信息和机上数据信息,接收地面控制站6发送的控制数据信息,实现无人机平
台7与地面控制站6的信息交互。
39.所述在线定标装置4既能实现两点辐射定标功能,还能够确保无人机载光谱仪光谱辐射定标的精度。
40.所述载荷电源系统5为机上各载荷供电。
41.所述并行数据处理器8实现高速处理化学监测数据、视像监测数据、定位和测高信息的数据处理和信息融合,并存储化学污染信息。
42.所述地面控制站6主要用于安装无人机控制设备,对无人机载化学气体监测系统的工作状态进行控制,并接收无人机采集的数据进行数据融合和界面图形显示。
43.本发明的工作过程:
44.如图4所示,首先,地面输运车辆运载无人机来到化学事故区域附近,使用载荷电源系统为机上各载荷供电并启动各载荷。由地面控制站6控制无人机飞抵目标监测地域,在巡航过程中由红外光谱成像化学监测载荷将采集的图像信息经数据图像采集与无线传输设备传回地面控制站6,当地面控制站6发现可疑云团后发送控制信息,无人机上的图像信息经数据图像采集与无线传输设备接收到地面控制站6信息后转入悬停,由于无人机悬停过程并不处于稳定状态,此时需要机上的三轴机载稳定平台为红外光谱成像化学监测载荷提供相对稳定的环境。
45.接着使用在线定标装置为红外光谱成像化学监测载荷进行辐射定标,定标完后才可再进行地面或空中气体云团监测。
46.然后,红外光谱成像化学监测载荷采集可疑云团光谱数据(如图3所示),其中的并行处理器实时高速处理化学监测数据、视像监测数据、定位和测高信息的数据处理和信息融合,并存储化学污染信息。
47.处理后的图像和数据信息经数据图像采集与无线传输设备传输到达地面控制站6,最后由地面控制站6对可疑云团的监测结果、范围及扩散情况进行显示和机上红外光谱成像化学监测载荷的控制。
48.无人机机载化学气体高光谱红外遥测任务系统的移动运输和作业功能示意如图4所示,地面控制站6端光谱鉴别结果显示界面如图5所示。
49.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。