1.本发明属于温室作物灌溉技术领域,具体涉及一种基于深度神经网络的温室作物灌溉方法。
背景技术:
2.灌溉是温室作物唯一的水分来源。供水过多过少都会对作物的产量和品质造成一定影响。供水过多会使作物根系受害,温室内空气湿度过高,导致病虫害增加,同时造成水分浪费;供水过少会使作物光合速率降低,造成减产。作物在不同的生长阶段,每天的需水量会有所不同。作物在幼苗阶段需水量较小,随着作物的生长,作物需水量逐渐增多,为控制品质在收获期需水量会减小。在一天中各个时间温室内温度、湿度和光照的变化也会对作物需水量产生影响,高温、高光照强度的情况下作物的需水量增大;低温、低光照的情况下作物的需水量减小。
3.中国专利(cn106258855a)公开了一种基于光辐射的智能灌溉系统,当光辐射累计能量大于预定的临界能量时,灌溉系统进行定量灌溉。顾哲等2018年在《农业工程学报》第34卷第23期公开了基于蒸散量和水量平衡的日光温室实时精准灌溉决策,以天为时间尺度,当田间蒸发总量大于土壤中可供作物利用水分时触发灌溉,灌溉量等于自上次灌溉期蒸散量总和。陈士旺等2019年在《农业机械学报》第50卷增刊公开了以基质含水率变化量、空气温度、空气湿度和光照强度为输入的番茄单株日蒸腾量预测模型。徐立鸿等2020年在《农业工程学报》第36卷第10期公开了基于温室环境和作物生长的番茄基质栽培灌溉模型,修改了penman-monteith模型的原始表达式去除了土壤蒸发部分,引入tomgro模型模拟番茄冠层生长对阻抗参数进行修正,得到了新的蒸腾模型;并考虑了太阳辐射对作物冠层以下部分耗水的影响,建立了单株番茄出每天的灌溉量模型。李莉等2020年在《农业机械学报》第51卷第1期公开了基于k-means聚类算法的草莓灌溉策略研究,根据基质含水率变化和日平均温度区间进行定量灌溉。现有技术主要考虑温室环境参数、基质含水量等来进行灌溉决策,不考虑作物实际生长情况,仅是以天为单位进行预测,不能根据当天实际环境参数和作物实际需水状态动态调整灌溉时间和灌溉量,难以满足温室作物精确灌溉需求。
技术实现要素:
4.针对现有技术中存在不足,本发明提供了一种基于深度神经网络的温室作物灌溉方法,可以及时检测作物水分状态,并根据作物水分状态和环境参数动态调整灌溉时间和灌溉量,实现对作物的精确灌溉。
5.本发明是通过以下技术手段实现上述技术目的的。
6.一种基于深度神经网络的温室作物灌溉方法,具体为:
7.每隔m分钟,采集一次温室环境参数以及作物冠层叶片的rgb图像、深度图像和近红外图像,并输入作物水分状态检测模型,判断作物的水分状态;
8.若作物水分状态为灌溉亏缺,则立即进行灌溉;并在经过作物水分胁迫恢复时间
后进行下一次作物水分状态检测;
9.若灌溉后n小时内均未出现作物水分状态为灌溉亏缺,则在灌溉后的n小时通过作物水分状态检测模型判断作物的水分状态,并进行灌溉;其中n为灌溉间隔时间。
10.进一步的,所述作物水分状态检测模型具体为:以定植日期、当前日期、当前时间、温室环境参数以及作物冠层叶片的rgb图像、深度图像和近红外图像作为输入,以作物水分状态作为输出,构建作物水分状态检测的深度神经网络模型。
11.进一步的,所述灌溉亏缺是灌溉水平小于f(1-p)的作物水分状态,定义净光合速率最高的灌溉水平为灌溉基准,记为f;定义允许的相对偏差为阈值,记为p。
12.更进一步的,灌溉水平大于f(1 p)的作物水分状态判为灌溉过量,在区间[f(1-p),f(1 p)]的作物水分状态判为灌溉适量。
[0013]
进一步的,所述作物水分胁迫恢复时间是根据作物水分胁迫恢复时间预测模型进行预测的,所述作物水分胁迫恢复时间预测模型具体为:以作物的定植日期、当前日期、当前时间、温室环境参数和灌溉量作为输入,作物水分胁迫恢复时间作为输出,建立作物水分胁迫恢复时间预测的深度神经网络模型。
[0014]
更进一步的,灌溉量是由下列公式确定的:
[0015][0016]
其中:q为单株灌溉量,q
pred
为接下来n小时内的单株蒸腾量预测值,q'为上次灌溉时的单株灌溉量,et为上次灌溉到当前时刻的单株蒸腾量。
[0017]
更进一步的,所述单株蒸腾量预测值q
pred
的获取方法为:将前24小时每分钟的温室环境参数、后n小时内整点的天气预报信息和温室环境调控系统控制参数设定值输入到温室环境参数预测模型,得到后n小时内的温室环境预测信息;将作物的定植日期、当前日期、当前时间和温室环境预测信息输入到作物蒸腾速率预测模型,计算得到作物蒸腾速率;在后n小时内对作物蒸腾速率进行积分计算得到作物蒸腾量预测值q
pred
。
[0018]
更进一步的,所述作物蒸腾速率预测模型具体为:以作物的定植日期、当前日期、当前时间和温室环境参数作为模型的输入,以作物蒸腾速率作为模型的输出,构建作物蒸腾速率预测的深度神经网络模型。
[0019]
更进一步的,所述温室环境参数预测模型具体为:将前24小时每分钟的温室环境参数、后n小时内整点的天气预报信息和温室环境调控系统控制参数设定值作为输入,将后n小时内每分钟的温室环境参数作为输出,构建温室环境参数预测的深度神经网络模型。
[0020]
进一步的,所述m和n满足(n
×
60)能被m整除。
[0021]
本发明的有益效果为:本发明在一天中可以根据定植日期、当前日期、当前时间、温室环境参数和作物冠层叶片的rgb图像、深度图像及近红外图像,及时判断作物的水分状态进行灌溉,并考虑了温室环境调控对温室环境的影响,然后根据温室环境参数和当前时间动态调整灌溉量,实现对作物的精确灌溉,同时也可以节省灌溉用水,减少水资源浪费。
附图说明
[0022]
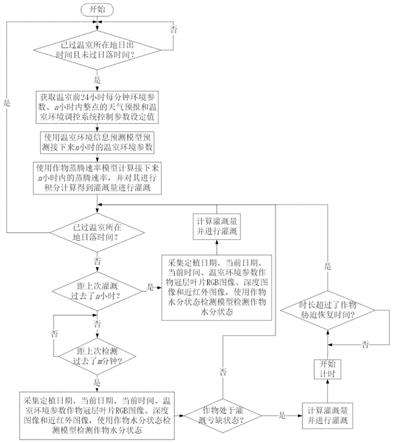
图1为本发明所述基于深度神经网络的温室作物灌溉方法流程图。
具体实施方式
[0023]
下面结合附图以及具体实施例对本发明作进一步的说明,但本发明的保护范围并不限于此。
[0024]
本实施例以基于深度神经网络的温室番茄灌溉方法为例,对实施过程进一步说明。
[0025]
s1,构建基于深度神经网络的作物蒸腾速率预测模型
[0026]
培育建立作物蒸腾速率预测模型所需的作物,对作物进行充分灌溉,记录作物的定植日期,每分钟采集一次当前日期、当前时间、温室环境参数和作物蒸腾速率。
[0027]
以作物的定植日期、当前日期、当前时间和温室环境参数作为模型的输入,以作物蒸腾速率作为模型的输出,构建作物蒸腾速率预测的深度神经网络模型。本实例中,番茄蒸腾速率预测模型的层数为3层,隐藏层神经元个数取6个。使用上述采集到的数据进行训练,得到基于深度神经网络的作物蒸腾速率预测模型。
[0028]
本实施例中,温室环境参数通过温室内气象站进行采集,番茄蒸腾速率采用包裹式茎流系统测量。
[0029]
s2,构建基于深度神经网络的温室环境参数预测模型
[0030]
温室环境调控系统自动进行调节,每分钟记录一次温室环境参数、当前天气预报和温室环境调控系统控制参数设定值。定义作物两次灌溉之间的时间间隔为灌溉间隔时间,记为n,单位为小时,本实例中,n=1。将前24小时每分钟的温室环境参数、后n小时内整点的天气预报信息和温室环境调控系统控制参数设定值作为输入,将后n小时内每分钟的温室环境参数作为输出,构建温室环境参数预测的深度神经网络模型。本实施例中,温室环境参数预测模型层数为3层,隐藏层神经元个数取45个。使用记录的温室环境参数、天气预报信息和温室环境调控系统控制参数设定值进行训练,得到基于深度神经网络的温室环境参数预测模型。
[0031]
s3,构建基于深度神经网络的作物水分状态检测模型
[0032]
培育建立作物水分状态检测模型所需的作物,设置不同的灌溉水平,使作物处于不同水分状态。每分钟采集一次定植日期、当前日期、当前时间、温室环境参数以及作物冠层叶片的rgb图像、深度图像、近红外图像和净光合速率;定义净光合速率最高的灌溉水平为灌溉基准,记为f;定义允许的相对偏差为阈值,记为p,本实例中,p=5%;灌溉水平大于f(1 p)的作物水分状态判为灌溉过量,在区间[f(1-p),f(1 p)]的作物水分状态判为灌溉适量,小于f(1-p)的作物水分状态判为灌溉亏缺。
[0033]
以定植日期、当前日期、当前时间、温室环境参数以及作物冠层叶片的rgb图像、深度图像和近红外图像作为输入,以作物水分状态作为输出,构建作物水分状态检测的深度神经网络模型。使用采集到的温室环境参数以及作物冠层叶片的rgb图像、深度图像、近红外图像和作物水分状态进行训练,得到基于深度神经网络的作物水分状态检测模型。
[0034]
所述作物冠层叶片rgb图像、深度图像和近红外图像采用realsense的d435i深度相机进行采集。
[0035]
所述净光合速率采用光合仪进行测定。
[0036]
s4,构建基于深度神经网络的作物水分胁迫恢复时间预测模型
[0037]
培育建立作物水分胁迫恢复时间预测模型所需的作物,将定植日期、当前日期、当前时间、温室环境参数以及作物冠层叶片的rgb图像、深度图像和近红外图像输入作物水分状态检测模型得到作物水分状态。当作物处于灌溉亏缺状态时,对作物进行充分灌溉,记录作物的定植日期、当前日期、当前时间、温室环境参数和灌溉量。此后,每分钟检测一次作物水分状态,直到作物水分状态不再是灌溉亏缺,所经历的时间记为作物水分胁迫恢复时间。
[0038]
以作物的定植日期、当前日期、当前时间、温室环境参数和灌溉量作为输入,作物水分胁迫恢复时间作为输出,建立作物水分胁迫恢复时间预测的深度神经网络模型。本实施例中,番茄水分胁迫时间预测模型层数为3层,隐藏层神经元个数取6个。使用上述采集数据进行训练,得到基于深度神经网络的作物水分胁迫恢复时间预测模型。
[0039]
s5,制定温室作物灌溉策略
[0040]
在一天中,每隔一分钟采集一次温室环境参数。在温室所在地日出时间后进行首次灌溉,灌溉量按照式(1)中水分状态为灌溉适宜状态的式子进行计算;
[0041]
定义两次作物水分状态检测之间的时间间隔为作物水分状态检测时间间隔,记为m,单位为分钟,本实施例中,m=10。每隔m分钟,采集一次温室环境参数以及作物冠层叶片的rgb图像、深度图像和近红外图像,并将上述信息输入作物水分状态检测模型判断作物的水分状态。若作物水分状态为灌溉亏缺,则立即进行灌溉,灌溉量通过式(1)计算得到,并在经过作物水分胁迫恢复时间后进行下一次作物水分状态检测。
[0042]
若灌溉后n小时内均未出现作物水分状态为灌溉亏缺(即灌溉过量或灌溉适量),则在灌溉后的n小时时通过作物水分状态检测模型判断作物的水分状态并启动灌溉施肥机进行灌溉,灌溉量由式(1)计算得到:
[0043][0044]
式中,q为单株灌溉量,单位:ml/株;
[0045]qpred
为接下来n小时内的单株蒸腾量预测值,单位:ml/株;
[0046]
q'为上次灌溉时的单株灌溉量,单位:ml/株;
[0047]
et为上次灌溉到当前时刻这个时间段的单株蒸腾量,单位:ml/株,计算方法为先根据作物蒸腾速率预测模型计算上次灌溉到当前时刻这个时间段内的作物蒸腾速率,然后在该时间段对作物蒸腾速率进行积分,得到的值即为这个时间段的作物蒸腾量。
[0048]
所述单株蒸腾量预测值q
pred
通过如下方法确定:将前24小时每分钟的温室环境参数、后n小时内整点的天气预报信息和温室环境调控系统控制参数设定值输入到s2所建立的温室环境参数预测模型,得到后n小时内的温室环境预测信息;将作物的定植日期、当前日期、当前时间和温室环境预测信息输入到s1所建立的作物蒸腾速率预测模型计算得到作物蒸腾速率;并在后n小时内对作物蒸腾速率进行积分计算得到作物蒸腾量预测值q
pred
。
[0049]
所述作物水分状态检测时间间隔m分钟和灌溉时间间隔n小时根据作物种类进行调整,且(n
×
60)可以被m整除。
[0050]
s6,根据温室作物灌溉策略对作物进行灌溉。本实例中,灌溉施肥机按照温室作物灌溉策略进行灌溉。
[0051]
所述实施例为本发明的优选的实施方式,但本发明并不限于上述实施方式,在不背离本发明的实质内容的情况下,本领域技术人员能够做出的任何显而易见的改进、替换或变型均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。