1.本发明涉及遥感影像技术领域,尤其涉及一种聚合多因素的城市道路信息提取方法。
背景技术:
2.高分辨率遥感影像具有分辨率高、几何结构与纹理特征明显等特点,被广泛的应用于各种地物的提取中。随着遥感影像的分辨率不断提高,影像中的地物信息更详细,可为人造地物的识别与提取进一步提供支撑。作为重要的人造地物之一,道路既是现代交通体系的主体研究对象,同时也是地图标识以及地理信息系统(gis)与遥感技术记录和提取的主要对象,如何快速、准确的从高分遥感影像数据中提取城市道路信息,成为相关研究的热点之一。
3.目前,国内外学者对高分辨率遥感影像的道路提取方法做了大量研究,按提取技术分为中低层次方法和中高层次方法两类。中低层次的道路特征提取方法有道路追踪方法、动态规划法、snake法、多时相分析法、立体像对分析法等;中高层次的道路特征提取方法知识表达法、模糊建模法等。从以上的研究中不难发现,目前较为成熟的方法大多数都是针对中、低分辨率的遥感影像,对于高分辨率的遥感影像道路信息提取算法大部分是在简单背景下利用道路的一种或几种特征建立模型,没有充分考虑拓扑特征及上下文语义特征,从而影响道路的提取精度。针对以上问题一些学者提出将面向对象技术应用到高分辨率遥感影像的信息提取中,它能有效地解决遥感分类中存在的噪声问题,充分利用对象特征的上下文语义信息,结合地物的类型在对应的尺度对地物的影像信息进行提取,从而增加其提取精度。
4.从众多研究结果来看,目前针对高分辨率遥感影像道路提取的研究分为两类:第一类,通过优化分割尺度来提高道路信息提取精度;目前面向对象的最优尺度选择方法主要分三类:(1)经验选择法,该方法简单易行,但带有一定的主观性,难以确定所得结果是否达到最优;(2)指标评价法,该方法指标的选择难以确定,无法达到理想的结果;(3)利用最优分割尺度计算模型计算最优分割尺度,该方法根据对象内部同质性与对象间异质性来判断影像的分割质量,是一种较为客观、实用的方法。第二类,通过选择合理的算法对提取规则进行优选,从而提高提取精度;目前建立道路信息提取规则的方法较多,如人工测试法、seath算法、cart算法等。其中,seath算法能够自动选择特征及确定阈值,且该算法已经嵌入ecognition软件中,能够方便、快捷地获得具有代表性的特征及其阈值。但两类研究都存在一定的片面性,无法形成完整、系统的道路信息提取算法。
5.针对以上不足,需要提供一种聚合多因素的城市道路信息提取方法,实现完整、系统的城市道路信息提取。
技术实现要素:
6.本发明要解决的技术问题在于现有技术中,城市道路信息提取存在片面性,无法
形成完整、系统的道路信息提取算法,针对现有技术中的缺陷,本发明提供了一种聚合多因素的城市道路信息提取方法,该方法采用最优分割尺度计算模型、seath算法,进行城市道路信息的快速提取。
7.为了解决上述技术问题,本发明提供了一种聚合多因素的城市道路信息提取方法,包括如下步骤:对遥感影像进行预处理;基于对象内部的同质性、相邻对象间的异质性,构造最优分割尺度计算模型计算最优尺度;设置形状因子、紧致度;根据最优尺度、形状因子、紧致度对遥感影像进行分割处理;基于seath算法获取分类规则;根据分类规则,得到道路信息提取结果,输出结果。
8.优选地,基于对象内部的同质性、相邻对象间的异质性,构造最优分割尺度计算模型计算最优尺度的步骤中,同质性的计算中,设预分割的图像具有m个波段,在执行多尺度分割时各波段被赋予的权重是ti(i=1,2,
…
,m),采用对象内部在各个波段上的标准差的加权和来表示同质性,公式如下:
[0009][0010][0011]
式中,vb(b=1,2,...,m)表示在波段b上的对象同质性,tb(b=1,2,...,m)表示波段b的权重,vi是对象i在波段b上的标准差,ai表示对象i的面积,n为整个区域分割后的对象总数。
[0012]
优选地,基于对象内部的同质性、相邻对象间的异质性,构造最优分割尺度计算模型计算最优尺度的步骤中,异质性的计算中,采用对象间在各波段上的标准差的加权和来表示异质性,
[0013][0014][0015]
式中,ib(b=1,2,...,m)表示在波段b上的对象异质性,tb(b=1,2,...,m)表示波段b的权重,w
ij
表示对象i和对象j的邻接关系,如果对象i和对象j邻接,则w
ij
=1,否则w
ij
=0,yi为对象i的光谱平均值,yj为对象j的光谱平均值,为整个影像的光谱平均值。
[0016]
优选地,基于对象内部的同质性、相邻对象间的异质性,构造最优分割尺度计算模型计算最优尺度的步骤中,还包括以下过程,
[0017]
基于对象内部的同质性、相邻对象间的异质性,提出改进的遥感影像分割质量评价函数,
[0018]
f(v,i)=(1-p)f(v) pf(i),
[0019][0020]
[0021]
其中,v表示对象内部在各波段上的标准差的加权和,i表示对象间在各波段上的标准差的加权和,p为i指数在目标函数中所占的比重,f(v)为对象内部的同质性,f(i)为相邻对象间的异质性,f(v,i)为分割质量评价函数;
[0022]
通过插值函数构建以分割尺度x为变量的分割质量函数,对待处理影像进行n 1次分割实验,得到n 1个f(v,i)值;
[0023]
求出系数a0,a1,...,an的值,从而得到最优分割尺度计算模型,
[0024]
h(x)=a0 a1x a2x2
…
anxn;
[0025]
通过最优分割尺度计算模型计算出分割质量值最大时的分割尺度x的值,该值为最优尺度。
[0026]
优选地,形状因子为反映对象形状完整性的参数,取值为0.5;紧致度描述对象与矩形的相似程度,取值为0.2。
[0027]
优选地,基于seath算法获取分类规则的步骤中,基于seath算法筛选最优分类特征并确定特征阈值,根据最优分类特征以及特征阈值建立规则集,获取分类规则。
[0028]
优选地,基于seath算法筛选最优分类特征并确定特征阈值过程中,包括以下步骤,
[0029]
采用j-m距离计算两个类别在分离特征上的分离度,距离j的计算方法如下,
[0030]
j=2(1-e-b
),
[0031][0032]
式中,b表示巴氏距离,m1和m2表示两个类别的分离特征均值,σ1和σ2表示两个类别的分离特征标准差;
[0033]
选择具有最大分离度的前两位分离特征作为最优分类特征,最优分类特征用于分类;
[0034]
计算两个类别的分类特征的最佳阈值。
[0035]
优选地,若两个类别的样本均服从正态分布,则最佳阈值的计算如下,
[0036][0037][0038]
式中,n1和n2表示两个类别的样本个数。
[0039]
优选地,若两个类别的样本不服从正态分布,最佳阈值的计算如下,
[0040]
当0.5<j<1.25时,t
′
=m2;
[0041]
当1.25<j<1.75时,t
′
=(t m2)/2;
[0042]
当j>1.75时,t
′
=t;
[0043]
式中,n1和n2表示两个类别的样本个数,
[0044]
[0045][0046]
优选地,分离特征包括光谱特征、形状特征、纹理特征、自定义特征。
[0047]
实施本发明的聚合多因素的城市道路信息提取方法,具有以下有益效果:(1)本发明聚合多因素的城市道路信息提取方法是一种基于高分辨率遥感影像城市道路信息高效提取方法,是一种高效的、自动化的方法,该方法得分割尺度为最优尺度,分类特征达到最优,提取精度较高,分类质量很好。(2)该方法适用范围较广,适用于大、中、小三种不同类型城市的遥感影像道路信息提取,在大、中、小型城市的道路提取中,中、小型城市提取效果很好,大型城市提取效果较好。(3)该方法在大、中、小型城市中道路的提取精度在不断增加,但其分类质量较好,在分割尺度和分类特征及其阈值都达到最优的情况下,大、中、小型城市的道路提取精度为大城市<中型城市<小型城市。
附图说明
[0048]
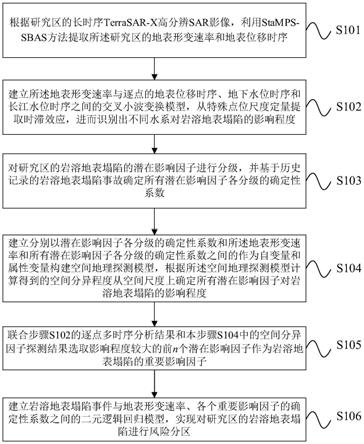
图1是本发明实施例的聚合多因素的城市道路信息提取方法的流程图;
[0049]
图2是本发明实施例的聚合多因素的城市道路信息提取方法中最优尺度选择的步骤的流程图;
[0050]
图3是本发明实施例的聚合多因素的城市道路信息提取方法中规则集建立的步骤的流程图。
具体实施方式
[0051]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0052]
图1是本发明实施例的聚合多因素的城市道路信息提取方法的流程图;如图1所示,本发明实施例提供的聚合多因素的城市道路信息提取方法,包括如下步骤:
[0053]
步骤s01:对遥感影像进行预处理;
[0054]
步骤s02:基于对象内部的同质性、相邻对象间的异质性,构造最优分割尺度计算模型计算最优尺度;
[0055]
步骤s03:设置形状因子、紧致度;
[0056]
步骤s04:根据最优尺度、形状因子、紧致度对遥感影像进行分割处理;
[0057]
步骤s05:基于seath算法获取分类规则;
[0058]
步骤s06:根据分类规则,得到道路信息提取结果,输出结果。
[0059]
本发明实施例聚合多因素的城市道路信息提取方法中,研究采用的数据主要包括遥感影像数据和道路路网数据。其中,遥感影像数据采用gf-2号影像数据作为研究数据(4米多光谱影像和1米全色影像);道路路网数据数据来源于中国科学院资源环境科学数据中心,数据具有较高的精度,被广泛地应用于与中国相关的科学研究中。
[0060]
本发明实施例提出一种聚合多因素的、系统的、基于高分辨率遥感影像的城市道路信息高效提取方法,该方法通过最优分割尺度计算模型与seath算法获得最优分割尺度
和最优分类特征及其阈值,根据最优分割尺度和最优分类特征及其阈值进行道路信息提取实验,实验结果表明,该方法是一种高效的、系统的、适用范围广的高分辨率遥感影像道路提取方法。
[0061]
本发明实施例提供的聚合多因素的城市道路信息提取方法中,对遥感影像进行辐射定标、大气校正、图像融合等预处理,这样可以突出道路信息,抑制其他信息,提高了影像分割以及提取的准确性。
[0062]
图2是本发明实施例的聚合多因素的城市道路信息提取方法中最优尺度选择的步骤的流程图;如图2所示,最优尺度选择(即最优分割尺度选择)包括如下步骤:
[0063]
步骤s11:进行影像处理
[0064]
步骤s121以及步骤s122:确定对象内部同质性以及确定对象间异质性;
[0065]
步骤s13:得到最优分割尺度计算模型;
[0066]
步骤s14:确定最优尺度。
[0067]
多光谱遥感影像是由多波段扫描仪对地物反射波扫描而得到的影像,为了提高影像信息的提取精度,在其信息提取中应该综合考虑、充分利用遥感影像各波段的特征。遥感影像分割的最理想结果是:在各个波段中都能体现出对象内部具有良好的同质性,相邻对象间具有良好的异质性。因此,对象内部同质性、对象间异质性可以用来评价影像质量分割效果的优劣,并构造最优分割尺度计算模型计算最优尺度。
[0068]
本发明实施例提供的聚合多因素的城市道路信息提取方法中,基于对象内部的同质性、相邻对象间的异质性,构造最优分割尺度计算模型计算最优尺度的步骤中,同质性的计算中,设预分割的图像具有m个波段,在执行多尺度分割时各波段被赋予的权重是ti(i=1,2,
…
,m),采用对象内部在各个波段上的标准差的加权和来表示同质性,公式如下:
[0069][0070][0071]
式中,vb(b=1,2,...,m)表示在波段b上的对象同质性,tb(b=1,2,...,m)表示波段b的权重,vi是对象i在波段b上的标准差,ai表示对象i的面积,n为整个区域分割后的对象总数;v值越小,影像对象内部异质性越小,对象同质性越好。
[0072]
本发明实施例提供的聚合多因素的城市道路信息提取方法中,基于对象内部的同质性、相邻对象间的异质性,构造最优分割尺度计算模型计算最优尺度的步骤中,异质性的计算中,采用对象间在各波段上的标准差的加权和来表示异质性,
[0073][0074][0075]
式中,ib(b=1,2,...,m)表示在波段b上的对象异质性,tb(b=1,2,...,m)表示波段b的权重,w
ij
表示对象i和对象j的邻接关系,如果对象i和对象j邻接,则w
ij
=1,否则w
ij
=0,yi为对象i的光谱平均值,yj为对象j的光谱平均值,为整个影像的光谱平均值。
[0076]
本发明实施例提供的聚合多因素的城市道路信息提取方法中,基于对象内部的同质性、相邻对象间的异质性,构造最优分割尺度计算模型计算最优尺度的步骤中,还包括以下过程:
[0077]
基于对象内部的同质性、相邻对象间的异质性,提出改进的遥感影像分割质量评价函数,
[0078]
f(v,i)=(1-p)f(v) pf(i),
[0079][0080][0081]
其中,v表示对象内部在各波段上的标准差的加权和,i表示对象间在各波段上的标准差的加权和,p为i指数在目标函数中所占的比重,f(v)为对象内部的同质性,f(i)为相邻对象间的异质性,f(v,i)为分割质量评价函数;
[0082]
通过插值函数构建以分割尺度x为变量的分割质量函数,对待处理影像进行n 1次分割实验,得到n 1个f(v,i)值;
[0083]
求出系数a0,a1,...,an的值,从而得到最优分割尺度计算模型,
[0084]
h(x)=a0 a1x a2x2
…
anxn;
[0085]
通过最优分割尺度计算模型计算出分割质量值最大时的分割尺度x的值,该值为最优尺度。
[0086]
分析可知:1、v随分割尺度的增加变大,分割尺度越大,分割影像产生的对象数量越少,单个对象多边形包含的面积越大,内部同质性减小,标准差增大。2、i随分割尺度的增大而减小。分割尺度越大,分割影像产生的对象数量越少,单个对象多边形包含的面积越大,对象间的相关性减小,异质性增加。
[0087]
本发明实施例提供的聚合多因素的城市道路信息提取方法中,形状因子(shape)与紧致度(compactness)会影响影像分割的质量,其中,形状因子是反映对象形状完整性的一种参数,紧密度可以描述对象与矩形的相似程度。根据大量的实验得出对于道路提取两者可分别设置为0.5,0.2。
[0088]
图3是本发明实施例的聚合多因素的城市道路信息提取方法中规则集建立的步骤的流程图,如图3所示,规则集建立包括如下步骤:
[0089]
步骤s21:根据最优尺度创建训练集;
[0090]
步骤s22:采用j-m距离计算两个类别在分离特征上的分离度;
[0091]
步骤s23:选择具有最大分离度的前两位分离特征作为最优分类特征;
[0092]
步骤s24:确定最佳阈值;
[0093]
步骤s25:输出规则集。
[0094]
影像分割将影像划分成一个个有意义的分离区域,形成初级的影像对象,成为道路解译的基础。道路提取质量的好坏关键在于决策树中的规则是否能有效的区分各种道路,因此必须充分了解各种道路在影像中的特征,通过道路的特征分析,建立分类规则。
[0095]
本发明实施例提供的聚合多因素的城市道路信息提取方法中,采用j-m距离计算两个类别在分离特征上的分离度,距离j的计算方法如下,
[0096]
j=2(1-e-b
),
[0097][0098]
式中,b表示巴氏距离,m1和m2表示两个类别的分离特征均值,σ1和σ2表示两个类别的分离特征标准差;
[0099]
选择具有最大分离度的前两位分离特征作为最优分类特征,最优分类特征用于分类;
[0100]
计算两个类别的分类特征的最佳阈值。
[0101]
本发明实施例提供的聚合多因素的城市道路信息提取方法中,计算两个类别的分类特征的最佳阈值的过程中,若两个类别的样本均服从正态分布,则最佳阈值的计算如下,
[0102][0103][0104]
式中,n1和n2表示两个类别的样本个数。
[0105]
若两个类别的样本不服从正态分布,最佳阈值的计算如下:
[0106]
当0.5<j<1.25时,t
′
=m2;
[0107]
当1.25<j<1.75时,t
′
=(t m2)/2;
[0108]
当j>1.75时,t
′
=t。
[0109]
seath算法采用分离度来评价两个类别在某特征上的区分程度。分离度的计算采用j-m(jeffries-matusita)距离,距离的取值范围是[0,2],0表示两个类别在某一特征上几乎完全混淆,2表示两个类别在某一特征上能够完全分开,然而,j=2的情况在实际应用中是不多见的,各类之间总会存在一些交叠。一般情况下,尤其是需要将分类模型用于其他影像数据时,选择具有最大分离性的前若干个特征用于分类已经足够。考虑到分类模型的可移植性,最好使分类所使用的典型特征数最少,因此,通常只保留j值靠前的2位特征参与分类。
[0110]
由于高分影像的高分特性,很多特征可应用于建立道路提取的规则集,然而在样本有限的情况下过多的特征会降低分类精度。因此,需要seath算法来选取具有客观性和代表性的分类特征及其阈值的确定。
[0111]
道路分类特征的选取应具有代表性和普遍性,才能够将道路很好的提取出来。本发明实施例提供的聚合多因素的城市道路信息提取方法中,分离特征包括光谱特征、形状特征、纹理特征、自定义特征。
[0112]
其中,光谱特征包括:(1)对象光谱波段均值,由于道路的反射率与其他地物不同,且不同道路类型的反射率也不相同,而对象区域的反射率特征是由波段均值反应的可以将其光谱的各个波段设置阈值区分不同道路类型以及区分道路与其他地物;(2)对象光谱波段标准差,对象区域的某个波段的标准差等于该对象区域内所有像素值减去该波段均值的平方和,然后除以像素总数减1所得到的商的开方。
[0113]
形状特征包括:(1)长宽比,道路具有明显的线性特征,通过线性特征可以剔除其
他对象,将道路从背景中分离出来。长宽比指数是常用的线性特征,其定义为对象的最小外接矩形的长度与宽度的比值;(2)紧致度,紧致度即对象的紧密程度,其计算方法是对象的最小外切矩形与对象的周长的比值,该比值越大,表示该对象的紧致度越高。
[0114]
纹理特征包括:(1)灰度共生矩阵的同质性(glcm_homog),同质性能够描述图像局部纹理变化的大小,如果图像局部均匀变化,则同质性的取值较大;(2)灰度共生矩阵角二阶矩(gldv_ang_2),灰度共生矩阵的角二阶矩主要分析的是图像灰度分布的均匀性,计算的是沿主对角的方向,分别统计主对角线上元素互相垂直的两个方向上的元素的平方和,当glcm中的值大部分分布在主对角线附近时,灰度共生矩阵角二阶矩的值较大,若分布均匀,则值较小。
[0115]
自定义特征主要包括植被归一化指数ndvi。
[0116]
采用本发明实施例所提供的方法进行实验与分析,具体对小型城市(瑞昌)、中型城市(长沙)、大型城市(北京)进行道路信息提取。高分辨率遥感影像道路信息提取实验步骤如下:第一,对影像数据进行最优尺度的选择,其形状因子为0.5,紧致度为0.2,各波段光谱权重为1∶1∶1∶1,得到最优尺度;第二,在ecognition软件中根据最优分割尺度对影像数据进行多尺度分割得到影像对象,选取具有代表性的对象作为样本,输出样本特征信息,进行道路分类规则以及最优分类特征阈值的确定;第三,根据最优分类特征与其阈值进行分类,得到道路信息提取结果,输出结果;最后对分类结果进行基于矢量样本点的精度评价。
[0117]
进行实验与分析的结果如下:
[0118]
实验一、小型城市(瑞昌)的道路提取,实验研究区位于江西省北部偏西的瑞昌市市区,该区域道路类型主要分为沥青混凝土道路与水泥混凝土道路,且分布较为均匀,在高分辨率影像道路信息提取中具有一定的代表性。根据最优尺度选择与道路分类规则选取的结果对影像进行面向对象的道路信息提取,所提取的道路基本覆盖了瑞昌市城市的主要道路,水泥混凝土道路与沥青混凝土道路在数量上相仿,但在分布上不同,沥青道路主要分布在市区中心,房屋较为密集;水泥混凝土道路主要分布在城市的外围,以及房屋相对较少的区域。由于房屋等干扰造成了部分错分、漏分的现象,所以需要对提取实验进行实验精度评价。其中,沥青道路的生产精度为0.78,即实际分类与参考类一致性的程度达到了78%,漏分误差为0.22,用户精度为0.83,错分误差为0.17;水泥混凝土道路的生产精度为0.63,即实际分类与参考类一致性的程度达到了63%,漏分误差为0.37,用户精度为0.99,错分误差为0.01;其他的生产精度为0.97,即实际分类与参考类一致性的程度达到了97%,漏分误差为0.03,用户精度为0.78,错分误差为0.22;由此可知,沥青道路漏分与错分误差都较大,水泥混凝土道路漏分误差较大,其他错分误差较大,其原因与三者的分布、房屋等因素的影响、分类方法的缺陷有关,本实验的总体精度为0.83,kappa系数为0.72,分类质量很好。
[0119]
实验二、中型城市(长沙)的道路提取,长沙市市区基本为沥青混凝土路面,水泥混凝土路面仅分布在双河路与捞刀河相交的北岸与长沙市东南部,其道路等级不高,路面宽度较小,在影像中辨认较为困难。采用本发明实施例提供的方法,长沙市城市快速路与进出长沙市的高速公路提取效果较好,城市主干道提取效果也较好,但是会出现道路断开的情况,水泥混凝土路面提取效果一般,总体来说道路信息提取效果较好,但仍然存在错分和漏分现象。沥青道路的生产精度为0.66,即实际分类与参考类一致性的程度达到了66%,漏分误差为0.34,用户精度为0.98,错分误差为0.02;水泥混凝土道路的生产精度为0.19,即实
际分类与参考类一致性的程度达到了19%,漏分误差为0.81,用户精度为1,错分误差为0;其他的生产精度为0.98,即实际分类与参考类一致性的程度达到了98%,漏分误差为0.02,用户精度为0.69,错分误差为0.31;由此可知,沥青道路漏分较大,水泥混凝土道路漏分误差极大,其他错分误差较大,本实验的总体精度为0.80,kappa系数为0.61,分类质量很好。
[0120]
实验三、大型城市(北京)的道路提取,北京市五环以内的道路已经基本实现沥青路全覆盖,所以在五环以内没有水泥混凝土路面,因此其分类类别只有沥青道路与其他。采用本发明实施例提供的方法,北京市道路提取城市快速路(环路)与进出北京市的高速公路的提取效果较好,道路提取较为完整,对于城市主干道等道路的提取出现了断断续续的情况,有些道路被漏分有些房屋被错分为道路。沥青道路的生产精度为0.66,即实际分类与参考类一致性的程度达到了66%,漏分误差为0.34,用户精度为0.98,错分误差为0.02;其他的生产精度为0.98,即实际分类与参考类一致性的程度达到了98%,漏分误差为0.02,用户精度为0.65,错分误差为0.35;由此可知,沥青道路漏分误差都较大,其他错分误差较大,本实验的总体精度为0.78,kappa系数为0.59,分类质量好。
[0121]
根据北京市、长沙市、瑞昌市的分类结果以及其分类质量可知,大、中、小型三类城市的kappa系数分别0.59、0.61、0.72,由此可知,本发明的聚合多因素的城市道路信息提取方法适用范围广,城市的大小与提取精度成反比。大、中、小三种类型城市的总体精度分别为0.78、0.80、0.83,kappa系数分别为0.59、0.61、0.72,小型城市中沥青道路漏分与错分误差都较大,水泥混凝土道路漏分误差较大,其他错分误差较大,中型城市中,沥青道路漏分较大,水泥混凝土道路漏分误差极大,其他错分误差较大,大型城市中沥青道路漏分误差都较大,其他错分误差较大。因此该方法在三种类型的城市中其分类精度均较高,且大型城市<中型城市<小型城市,但其kappa系数均没有超过0.80,即分类质量没有达到极好的程度,可通过降低沥青道路和水泥混凝土道路的漏分误差以及其他的错分误差来提高本方法的提取精度。
[0122]
综上所述,实施本发明的聚合多因素的城市道路信息提取方法,具有以下有益效果:道路信息提取方法综合考虑了光谱信息与空间信息,加入了人对事物认知的知识,在一定程度上与人类认知事物过程相吻合,提高了信息提取准确率,有效地避免了噪音带来的影响。本发明提出的道路信息提取方法的核心是最优分割尺度的选择与规则集的建立。最优分割尺度选择的核心是最优尺度计算模型,建立规则集的核心是seath算法。
[0123]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。