1.本技术涉及鱼类育种技术领域,具体为一种非接触性鱼类的育种系统。
背景技术:
2.鱼类育种是鱼类在繁殖过程中必不可少的一个环节,如在养殖场或者养殖实验室里,也经常需要对养殖的鱼类进行育种工作。现有的鱼类育种工作基本上都是人工完成的,尤其是在注射催产作业中,需要工作人员对所有亲鱼一一进行注射作业,工作量很大,且对工作人员的要求也较高,如当工作人员注射操作不熟练,则很容易就会造成亲鱼伤亡;同时,工作人员对鱼类的直接接触,也极易将病毒细菌带入鱼群中,从而不利于鱼类的繁殖与生存。
技术实现要素:
3.(一)解决的技术问题
4.为解决以上问题,本技术提供了一种非接触性鱼类的育种系统。
5.(二)技术方案
6.为实现上述目的,本技术提供如下技术方案:一种非接触性鱼类的育种系统,包括亲鱼缸、产卵缸、连通管道、驱鱼机构、自动注射装置、鱼巢装置和孵化缸;连通管道一端与亲鱼缸连接,另一端与产卵缸连接,以连通亲鱼缸和产卵缸;驱鱼机构可滑动连接于亲鱼缸上,以驱使亲鱼游动;自动注射装置安装于连通管道上,以对亲鱼进行注射作业;鱼巢装置包括鱼巢本体和鱼巢支架,鱼巢支架可升降设置于产卵缸内,鱼巢本体可拆卸连接于鱼巢支架上,且鱼巢本体可收集亲鱼所产鱼卵;孵化缸可对亲鱼所产鱼卵进行孵化。
7.优选地,该非接触性鱼类的育种系统还包括水温控制器,水温控制器固定安装于产卵缸内,并将产卵缸内水温控制在22~26摄氏度。
8.优选地,连通管道内水位高度为5~7cm。
9.优选地,该非接触性鱼类的育种系统还包括第一驱动机构,第一驱动机构安装于亲鱼缸上,且第一驱动机构与驱鱼机构驱动连接,以驱动驱鱼机构于亲鱼缸上滑动。
10.优选地,亲鱼缸上连接连通管道一端的内壁倾斜设置,且该内壁底部与亲鱼缸中心的距离小于该内壁顶部与亲鱼缸中心的距离。
11.优选地,自动注射装置包括防跳板、升降机构和电动注射器;连通管道上设有顶部开口,防跳板固定安装于连通管道的顶部开口上;升降机构包括滑动件和第二驱动机构,滑动件可滑动连接于防跳板上,第二驱动机构安装于防跳板上,且第二驱动机构与滑动件驱动连接,以驱使滑动件进行升降滑动;电动注射器安装于滑动件上,且电动注射器可对亲鱼进行注射作业。
12.优选地,自动注射装置还包括触发机构,触发机构包括触发件和第三驱动机构,触发件可滑动连接于产卵缸上,第三驱动机构固定安装于产卵缸上,且第三驱动机构与触发件驱动连接,以驱使触发件进行升降滑动。
13.优选地,触发件包括触发挡板、连接件和弹性件,连接件可滑动连接于产卵缸上,且连接件与第三驱动机构驱动连接,连接件上设有滑动槽,触发挡板滑动连接于滑动槽上,触发挡板上设有压力传感器,弹性件置于滑动槽内,且弹性件一端与触发挡板连接,另一端与滑动槽端壁连接。
14.优选地,自动注射装置还包括遮挡件,遮挡件安装于滑动件上,且遮挡件上设有柔性层,以对亲鱼的头部及尾部进行遮挡。
15.优选地,该非接触性鱼类的育种系统还包括培育缸,培育缸与孵化缸通过管道连通,且该管道上设有通断阀。
16.(三)有益效果
17.本技术提供了一种非接触性鱼类的育种系统,具备以下有益效果:通过滑动调节驱鱼机构,以使驱鱼机构靠近产卵缸滑动,则可使得亲鱼缸内亲鱼的活动空间变小,在拥挤的情况下,亲鱼则会往连通管道游动,当亲鱼游动至连通管道上时,自动注射装置则可对亲鱼进行注射催产,注射催产完成后,亲鱼则可游动至产卵缸,待亲鱼充分发情后,则可将鱼卵产于鱼巢本体上,然后将鱼巢支架上升调节,并将含有鱼卵的鱼巢本体拆卸下来,转移至孵化缸进行孵化。整个注射催产过程无需工作人员进行手动注射操作,既可以避免因工作人员注射操作不熟练而导致亲鱼伤亡的状况,以减小经济损失;又可以减少因人为干预而造成病毒、细菌带入的状况,以提高鱼卵的孵化率和成活率;还可以降低工作人员的工作量,并提升注射效率,从而更加方便鱼类育种工作的快速、高效进行,为育种作业提供便利。
附图说明
18.附图用来提供对本技术的进一步理解,并且构成说明书的一部分,与本技术的实施例一起用于解释本技术,并不构成对本技术的限制,在附图中:
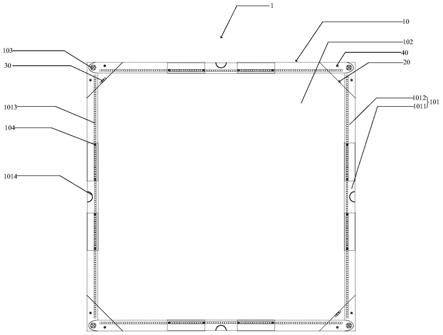
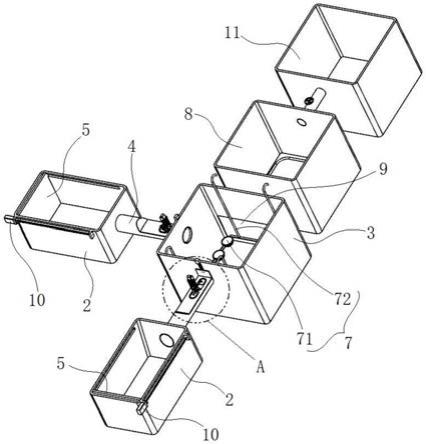
19.图1示出了本技术的实施例的整体结构示意图;
20.图2示出了图1中a部的放大图;
21.图3示出了本技术的实施例中触发机构的结构示意图;
22.图4示出了本技术的实施例中触发件的爆炸图。
23.图中:2亲鱼缸、3产卵缸、4连通管道、5驱鱼机构、6自动注射装置、61防跳板、62升降机构、621滑动件、622第二驱动机构、63电动注射器、64遮挡件、65触发机构、651触发件、6511触发挡板、6512连接件、6513弹性件、652第三驱动机构、7鱼巢装置、71鱼巢本体、72鱼巢支架、8孵化缸、9水温控制器、10第一驱动机构、11培育缸。
具体实施方式
24.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
25.参阅附图1-附图4,本技术实施例提供一种非接触性鱼类的育种系统,包括亲鱼缸2、产卵缸3、连通管道4、驱鱼机构5、自动注射装置6、鱼巢装置7和孵化缸8;
26.连通管道4一端与亲鱼缸2连接,另一端与产卵缸3连接,以连通亲鱼缸2和产卵缸
3;
27.驱鱼机构5可滑动连接于亲鱼缸2上,以驱使亲鱼游动;
28.自动注射装置6安装于连通管道4上,以对亲鱼进行注射作业;
29.鱼巢装置7包括鱼巢本体71和鱼巢支架72,鱼巢支架72可升降设置于产卵缸3内,鱼巢本体71可拆卸连接于鱼巢支架72上,且鱼巢本体71可收集亲鱼所产鱼卵;
30.孵化缸8可对亲鱼所产鱼卵进行孵化。
31.本实施例中,亲鱼缸2包括用于放置雌性亲鱼的雌性亲鱼缸和用于放置雄性亲鱼的雄性亲鱼缸,从而便于将雌性亲鱼和雄性亲鱼分开放置和催产注射,进而便于催产注射的有序进行。鱼巢本体71可通过绑绳或者卡扣连接的方式可拆卸连接于鱼巢支架72上,从而便于实现鱼巢本体71的快速安装或者拆卸,以满足使用需求;鱼巢支架72可与外部升降机构连接,以便于驱使其进行升降调节,进而满足使用需求。孵化缸8内设有微孔充氧管等充氧装置,以使得孵化缸8内氧气含量充足,从而利于鱼卵的孵化。连通管道4为圆柱状结构设计,则可使得连通管道4内水位最高的位置处于管道的中间,同时配合连通管道4内的弧度也可以使得亲鱼始终置于连通管道4的中间位置,以方便注射作业的进行。
32.根据上述方案,通过滑动调节驱鱼机构5,以使驱鱼机构5靠近产卵缸3滑动,则可使得亲鱼缸2内亲鱼的活动空间变小,在拥挤的情况下,亲鱼则会往连通管道4游动,当亲鱼游动至连通管道4上时,自动注射装置6则可对亲鱼进行注射催产,注射催产完成后,亲鱼则可游动至产卵缸3,待亲鱼充分发情后,则可将鱼卵产于鱼巢本体71上,然后将鱼巢支架72上升调节,并将含有鱼卵的鱼巢本体71拆卸下来,转移至孵化缸8进行孵化。整个注射催产过程无需工作人员进行手动注射操作,既可以避免因工作人员注射操作不熟练而导致亲鱼伤亡的状况,以减小经济损失;又可以减少因人为干预而造成病毒、细菌带入的状况,以提高鱼卵的孵化率和成活率;还可以降低工作人员的工作量,并提升注射效率,从而更加方便鱼类育种工作的快速、高效进行,为育种作业提供便利。
33.进一步地,为了便于控制产卵缸3内的水温,以给亲鱼提供舒适的产卵环境。该非接触性鱼类的育种系统还包括水温控制器9,水温控制器9固定安装于产卵缸3内,并将产卵缸3内水温控制在22~26摄氏度。
34.进一步地,为了便于对亲鱼进行注射操作,并方便将注射位置控制在亲鱼的侧身上,连通管道4内水位高度为5~7cm。由于连通管道4内水位高度较小,此时亲鱼只能在连通管道4内进行半侧身的游动,从而便于自动注射装置6于亲鱼的侧身上进行注射催产作业,且注射位置于亲鱼侧身的背鳍和臀鳍之间,并避开脊椎位置。
35.进一步地,为了便于对驱鱼机构5进行滑动调节,以满足使用需求。该非接触性鱼类的育种系统还包括第一驱动机构10,第一驱动机构10安装于亲鱼缸2上,且第一驱动机构10与驱鱼机构5驱动连接,以驱动驱鱼机构5于亲鱼缸2上滑动。
36.本实施例中,该非接触性鱼类的育种系统上还可以设置控制器;控制器可与第一驱动机构10信号连接,驱鱼机构5包括驱鱼网,驱鱼网上设有与控制器信号连接的压力传感器,当驱鱼网上的压力传感器上的压力达到设定值时,控制器则可控制第一驱动机构10停止工作,以使驱鱼机构5停止滑动,从而避免夹伤亲鱼。第一驱动机构10优选为丝杆电机。
37.进一步地,为了更好的对亲鱼进行保护,以避免将亲鱼夹伤,亲鱼缸2上连接连通管道4一端的内壁倾斜设置,且该内壁底部与亲鱼缸2中心的距离小于该内壁顶部与亲鱼缸
2中心的距离。
38.本实施例中,亲鱼缸2上连接连通管道4一端的内壁倾斜设置,则可使得亲鱼缸2内,其底部的尺寸小于顶部的尺寸,且驱鱼机构5为竖直设置,则当驱鱼机构5滑动以使亲鱼缸2内亲鱼的活动空间变小时,亲鱼缸2底部的活动空间会比其顶部的更小,此时亲鱼则会向上游动,从而可以避免驱鱼机构5将亲鱼夹伤,进而更好的实现对亲鱼的保护。
39.进一步地,为了更便捷、有效的对亲鱼进行注射催产作业,以便于育种作业的有序展开。自动注射装置6包括防跳板61、升降机构62和电动注射器63;
40.连通管道4上设有顶部开口,防跳板61固定安装于连通管道4的顶部开口上,以避免亲鱼从该顶部开口跳出去;
41.升降机构62包括滑动件621和第二驱动机构622,滑动件621可滑动连接于防跳板61上,第二驱动机构622安装于防跳板61上,且第二驱动机构622与滑动件621驱动连接,以驱使滑动件621进行升降滑动;
42.电动注射器63安装于滑动件621上,且电动注射器63可对亲鱼进行注射作业。
43.本实施例中,第二驱动机构622优选为丝杆电机,通过第二驱动机构622驱动滑动件621升降运动,则可使得电动注射器63升降运动,从而满足对亲鱼的注射需求;同时,电动注射器63的注射角度为30~40度,注射深度为0.5~1cm,从而实现对亲鱼的便捷、有效注射催产需求。电动注射器63为现有技术,此处不再赘述。
44.进一步地,为了便于对亲鱼于连通管道4内的位置进行准确限定,进而保证亲鱼的注射位置于亲鱼侧身的背鳍和臀鳍之间,并避开脊椎位置。自动注射装置6还包括触发机构65,触发机构65包括触发件651和第三驱动机构652,触发件651可滑动连接于产卵缸3上,第三驱动机构652固定安装于产卵缸3上,且第三驱动机构652与触发件651驱动连接,以驱使触发件651进行升降滑动。
45.本实施例中,第三驱动机构652优选为电动丝杆,且第三驱动机构652与控制器信号连接,触发件651可对亲鱼头部进行阻挡限位,从而保证亲鱼于连通管道4内的准确位置。
46.具体的,触发件651包括触发挡板6511、连接件6512和弹性件6513,连接件6512可滑动连接于产卵缸3上,且连接件6512与第三驱动机构652驱动连接,连接件6512上设有滑动槽,触发挡板6511滑动连接于滑动槽上,触发挡板6511上设有压力传感器,弹性件6513置于滑动槽内,且弹性件6513一端与触发挡板6511连接,另一端与滑动槽端壁连接。
47.本实施例中,压力传感器可与控制器信号连接,初始时,第三驱动机构652驱动触发件651向下滑动至连通管道4内,当亲鱼头部触碰到触发挡板6511时,亲鱼则置于设定位置处,此时压力传感器则可将压力信号传递给控制器,控制器再控制第二驱动机构622驱动滑动件621向下滑动,进而使得电动注射器63向下运动,进而实现对亲鱼的注射操作;注射操作完成后,控制器控制第二驱动机构622驱动滑动件621向上滑动,且控制器控制第三驱动机构652驱动触发件651向上滑动,以使亲鱼能够继续向前游动至产卵缸3内。
48.弹性件6513优选为压缩弹簧,当注射操作完成后,控制器只是控制第三驱动机构652驱动触发件651向上滑动略大于亲鱼头部高度的距离3~5cm,则当亲鱼鱼身触碰到触发挡板6511底部时,触发挡板6511还可以向上受力自动滑动,以使亲鱼通过连通管道4,也避免夹伤亲鱼,此时弹性件6513处于压缩状态,亲鱼完全离开连通管道4后,弹性件6513则可使得触发挡板6511向下滑动,且控制器继续控制第三驱动机构652驱动触发件651向下滑
动,以阻挡下一亲鱼,便于亲鱼注射作业的持续进行。
49.进一步地,为了更好的对亲鱼进行固定,以方便注射催产作业的进行。自动注射装置6还包括遮挡件64,遮挡件64安装于滑动件621上,且遮挡件64上设有柔性层,以对亲鱼的头部及尾部进行遮挡。
50.本实施例中,柔性层为海绵层,当第二驱动机构622驱动滑动件621向下滑动时,则可使得遮挡件64抵接于亲鱼上,以对亲鱼头部及眼睛、尾部进行遮挡和固定,从而方便电动注射器63进行注射作业;注射完成后,遮挡件64升高至亲鱼鱼身顶部的2~3cm,以保证不会出现亲鱼堆叠的状况,从而使得注射催产作业能够持续、有效进行。
51.进一步地,为了便于对幼鱼培养密度进行调控,以利于幼鱼的良好生长。该非接触性鱼类的育种系统还包括培育缸11,培育缸11与孵化缸8通过管道连通,且该管道上设有通断阀。当孵化缸8内幼鱼的密度达到设定值时,调整通断阀,以使得培育缸11与孵化缸8连通,再利于两者之间的水位差,即可将部分幼鱼分流至培育缸11内,从而实现对幼鱼生长密度的调控;为了满足培育需求,培育缸11可以设有多个。
52.还需要说明的是,尽管已经示出和描述了本技术的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本技术的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本技术的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。