1.本发明一种应用于近程超声速巡航弹的掠地飞行技术,属飞行器姿态控制领域,涉及飞行器纵向通道运动模型和姿态控制回路等方面。
背景技术:
2.由于低空大气密度大,所以在进行低空超声速巡航时,需要用更大的推力来克服气动阻力,因此一般使用亚音速来进行长距离掠海或者掠地飞行。而随着防御武器以及探测手段的发展,传统的亚音速巡航弹和一些超声速巡航弹较容易被拦截。为了更好地实现常规超声速巡航弹的突防能力,变弹道巡航得到了越来越多的重视。降高弹道则是其中一种方式,该种弹道在巡航后段几乎是掠地或者掠海飞行的。超声速掠地或者掠海巡航则给飞行控制系统提出了更严格的要求。
技术实现要素:
3.本文以某型号超声速巡航弹为依托提出了一种应用于近程超声速巡航弹的掠地飞行技术。该发明对本人上一个发明《一种应用于近程超声速巡航弹的定高飞行技术》具有一定继承性,且是对其定高精度的优化。本发明在2.1ma左右的巡航速度进行高度30m的掠地巡航时,60秒左右巡航时间内定高精度为
±
3m。
4.本发明的技术解决方案是:(1)一种应用于近程超声速巡航弹的掠地飞行技术,旨在解决近程超声速巡航弹掠海或 者掠地巡航时的定高精度问题。(2)根据前述的一种应用于近程超声速巡航弹的掠地飞行技术,内环利用攻角和俯仰角 速度的反馈控制来稳定姿态,外环使用当地弹道倾角和海拔高度的综合比例控制来生成制导 指令。(3)根据前述的一种应用于近程超声速巡航弹的掠地飞行技术,外环根据当地弹道倾角 和海拔高度生成的制导指令是攻角指令而非过载指令。(4)根据前述的一种应用于近程超声速巡航弹的掠地飞行技术,使用本发明中图1所述 控制结构来进行定高飞行。(5)根据前述的一种应用于近程超声速巡航弹的掠地飞行技术,高度差前的系数对高度 差进行适应性变化,其形式是(6)根据前述的一种应用于近程超声速巡航弹的掠地飞行技术,使用本发明“具体实施 方式(6)”所提的制导和控制律来进行巡航弹的定高飞行。
5.本发明的优点具有继承性和开创性,在于:
6.(1)外环导引指令简单,易于实现,不需要复杂的解算;
7.(2)外环控制参数易于调节;
8.(3)外环的导引指令是程序攻角指令,便于对爬升段或下压段的最大攻角进行限幅,这一点对使用冲压发动机进行巡航的导弹而言尤为重要;
9.(4)本发明提出的定高飞行技术对不同的定高高度有很强的适应性;
10.(5)本发明提出的定高飞行技术对导弹初始发射角的依赖性大大降低,在发动机能力足够的情况下,同一个发射角也可以实现不同高度的定高飞行;
11.(6)本发明提出的定高飞行技术虽然依托于现有型号的超声速巡航弹,但是对不同速度的巡航弹都具有适用性。
12.(7)本发明短时间内掠地巡航(或者其他高度巡航时)精度较高。
附图说明
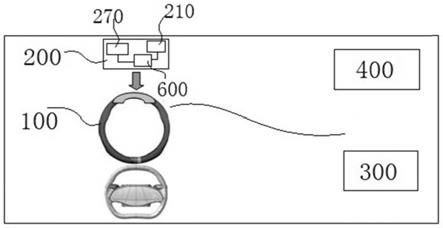
13.图1是按照本发明所提出的掠地巡航技术,其对应的内外环控制结构图
14.图中
15.红色虚线框内为内环控制回路;
16.红色虚线框以外的部分为外环制导回路。
17.黄色矩形框中的内容为本发明提出的优化定高公式
18.图2是以某型号超声速弹为依托,基准弹道定高巡航结果对照图
19.图中
20.初始海拔高度为1245m,掠地高度30m,即定高1275m。
21.均为同条件下的基准弹道,红色实线是应用本文所提掠地巡航技术仿真出的海拔高度,蓝色实线为对照实验。
22.图3是图2的部分放大版图
23.可以看出,本发明的掠地巡航高度误差为-2m~1m,而对照试验的定高误差为-15m~12m。
24.图4是以某型号超声速弹为依托,10条极限弹道掠地巡航结果对照图
25.图中
26.初始海拔高度为1245m,掠地高度30m,即定高1275m。
27.均为同条件下的基准弹道,红色实线是应用本文所提掠地巡航技术仿真出的海拔高度,蓝色虚线为对照实验。
28.图5是图4的部分放大版图
29.可以看出,本发明在极限拉偏条件时仍能很好的掠地巡航,高度误差为-3m~3m;而对照试验的定高巡航误差为-21m~22m。
具体实施方式
30.一种应用于近程超声速巡航弹的掠地飞行技术:
31.(1)按照经典的频域分析法进行内环控制参数设计。
32.内环控制指令如下:
33.δz=k
p
·
(α-αc) kd·
ωz34.其中,k
p
、kd就是需要在本环节设计的控制系数。
35.(2)生成外环导引指令,方式如下:
[0036][0037]
其中,需要在本环节对k
pθ
、k
ph
两个系数进行取值,高度变化值远大于当地弹道倾角变化的值,因此在调节参数时k
pθ
一般要远大于k
ph
,可以取初始600倍的比例关系。
[0038]
(2a)可以先去除高度项,只调节k
pθ
,结合后续步骤实现水平巡航后,再加入高度环节实现定高巡航。
[0039]
(3)将外环制导指令与内环控制指令结合,形成俯仰通道控制指令,如下:
[0040][0041]
δz=k
p
·
(α-αc) kd·
ωz[0042]
(4)用六自由度弹道进行仿真验证。
[0043]
(5)若弹道存在抖振或者不稳定或者无法定高则需重新进行步骤(2),并重复(4)。
[0044]
(6)由于在额定高度附近时,(h
c-h)较小,且k
ph
较小,这导致在额定高度附近时,外环导引指令αc对高度变化不敏感,因此可以粗定高但是不能精准定高巡航。本步骤是在(2) 的基础上进行优化,思路是让系数k
ph
适应高度差的变化,即当(h
c-h)较大时,该系数较小,而当(h
c-h)较小时,该系数较大,可用倒数、指数再结合高度差的绝对值等生成一组经验公式来满足这一特性,那么此时外环生成导引指令的方式如下:
[0045][0046]
则俯仰通道控制指令如下:
[0047][0048]
δz=k
p
·
(α-αc) kd·
ωz[0049]
以上6个步骤则可以实现本发明,并且可以对本发明的正确性进行验证。为充分体现本发明的有点,本文设置了对照实验。前5个步骤设置为一组实验(前5个步骤结合既是本人上一个专利《一种应用于近程超声速巡航弹的定高飞行技术》的主要发明内容),作为本发明的对照试验,全部6个步骤组合则是对本发明的验证试验。试验结果见附图及其说明。
[0050]
本发明未详细说明部分属本领域技术人员公知常识。
技术特征:
1.一种应用于近程超声速巡航弹的掠地飞行技术,旨在解决近程超声速巡航弹掠海或者掠地巡航时的定高精度问题。2.根据权利要求1所述的一种应用于近程超声速巡航弹的掠地飞行技术,其特征在于,内环利用攻角和俯仰角速度的反馈控制来稳定姿态,外环使用当地弹道倾角和海拔高度的综合比例控制来生成制导指令。3.根据权利要求1所述的一种应用于近程超声速巡航弹的掠地飞行技术,其特征在于,外环根据当地弹道倾角和海拔高度生成的制导指令是攻角指令而非过载指令。4.根据权利要求1所述的一种应用于近程超声速巡航弹的掠地飞行技术,其特征在于,使用本发明中图1所述控制结构来进行定高飞行。5.根据权利要求1所述的一种应用于近程超声速巡航弹的掠地飞行技术,其特征在于,高度差前的系数对高度差进行适应性变化,其形式是6.根据权利要求1所述的一种应用于近程超声速巡航弹的掠地飞行技术,其特征在于,使用本发明“具体实施方式(6)”所提的制导和控制律来进行巡航弹的定高飞行。
技术总结
本发明一种应用于近程超声速巡航弹的掠地飞行技术,是对《一种应用于近程超声速巡航弹的定高飞行技术》的继承和优化,通过内环保证飞行姿态的稳定性,通过外环生成定高飞行的导引指令,由内环控制飞行器跟踪外环的导引指令从而实现定高飞行的目的。其中,外环高度项前的比例系数对高度差有一定的适应性,在高度差越小时该系数越大,能够较大程度上降低巡航高度误差。在进行30m高度掠地巡航时,极限拉偏条件下本发明可以将巡航高度误差从
技术研发人员:卞李坤 张永丰 梁建军 谢雪明 苏鹏 石亦琨
受保护的技术使用者:北京星途探索科技有限公司
技术研发日:2021.10.29
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。