1.本发明涉及一种激光干涉仪。
背景技术:
2.在专利文献1中公开了一种对进行振动的物体照射激光束并利用因多普勒效应而发生了变化的激光束的频率来对物体的速度进行测定的激光多普勒测速仪。在激光多普勒测速仪中,为了对物体的振动现象的方向性进行检测,从而需要对从激光源出射的光进行调制的结构。因此,在专利文献1中,公开了使用声光学调制器或电光学调制器的技术。
3.在专利文献1所记载的声光学调制器或电光学调制器中,输入有从振荡电路被输出的rf(radio frequency,射频)信号。由此,使被设置在这些光调制器内的光学元件的折射率发生变化,从而对光进行调制。
4.在将从激光源出射的光照射在进行振动的物体上时,会发生反射而产生返回光。由于返回光引起多普勒频移,因此通过使该返回光与参照光干涉而产生拍频信号。通过使该拍频信号从解调器通过,从而能够求出物体的振动速度。通常,在解调器中,使用由振荡电路产生的基准信号来进行解调。
5.振荡电路为,例如将水晶振子等的信号源作为源振而输出所期望的频率信号的电路。然而,水晶振子的振荡中具有温度特性。因此,存在当受到温度变化的影响时会使得从振荡电路被输出的信号的频率发生变化这样的问题。
6.另一方面,由前述的光调制器实施的光的调制中也具有温度特性。因此,当受到温度变化的影响时,由光调制器调制的调制频率会发生变化。
7.另外,光调制器的温度特性与水晶振子的温度特性不同。该温度特性的偏离会影响到激光多普勒测速仪的计测结果。其结果为,存在计测速度的精度下降这样的问题。
8.专利文献1:日本特开平9-54293号公报
技术实现要素:
9.本发明的应用例所涉及的激光干涉仪的特征在于,具备:
10.光源部,其射出第一激光;
11.光调制器,其具备振动元件,并且使用所述振动元件来对所述第一激光进行调制,从而生成包含调制信号的第二激光;
12.受光元件,其接受第三激光和所述第二激光的干涉光,并输出受光信号,所述第三激光包含所述第一激光被对象物反射而生成的采样信号;
13.解调电路,其基于基准信号并根据所述受光信号而对所述采样信号进行解调;
14.振荡电路,其向所述解调电路输出所述基准信号,
15.所述振动元件为所述振荡电路的信号源。
附图说明
16.图1为表示实施方式所涉及的激光干涉仪的功能框图。
17.图2为表示图1所示的传感器头部以及光学系统的概要结构图。
18.图3为表示图2所示的光调制器的第一结构例的立体图。
19.图4为表示光调制器的第二结构例的一部分的俯视图。
20.图5为表示光调制器的第三结构例的俯视图。
21.图6为对在入射光ki从相对于图3所示的振动元件的表面而垂直的方向入射时产生多个衍射光的情况进行说明的概念图。
22.图7为对被构成为入射光ki的行进方向与参照光l2的行进方向所成的角度成为180度的光调制器进行说明的概念图。
23.图8为对被构成为入射光ki的行进方向与参照光l2的行进方向所成的角度成为180度的光调制器进行说明的概念图。
24.图9为对被构成为入射光ki的行进方向与参照光l2的行进方向所成的角度成为180度的光调制器进行说明的概念图。
25.图10为表示具有封装结构的光调制器的剖视图。
26.图11为表示一阶逆变器振荡电路的结构的电路图。
27.图12为振动元件的lcr等效电路的示例。
28.图13为简化地表示现有的激光干涉仪的结构的图。
29.图14为简化地表示图1的激光干涉仪的结构的图。
30.图15为表示受光信号的波形的一个示例的曲线图。
31.图16为表示振荡电路的负载电容c
l
与对于作为被测定物的压电元件的位移振幅的计测结果的精度的关系的曲线图。
32.图17为表示第一变形例所涉及的激光干涉仪所具备的光学系统的安装结构的概要结构图。
33.图18为表示第二变形例所涉及的激光干涉仪所具备的光学系统的安装结构的概要结构图。
34.图19为表示第三变形例所涉及的激光干涉仪所具备的光学系统的安装结构的概要结构图。
35.图20为表示第四变形例所涉及的激光干涉仪所具备的光学系统的安装结构的概要结构图。
具体实施方式
36.以下,基于附图所示的实施方式而对本发明的激光干涉仪进行详细说明。
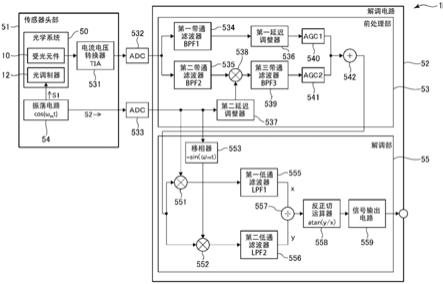
37.图1为表示实施方式所涉及的激光干涉仪的功能框图。
38.图1所示的激光干涉仪1具有设置有光学系统50的传感器头部51、被输入有来自光学系统50的受光信号的解调电路52、以及向解调电路52输出基准信号的振荡电路54。
39.1.传感器头部
40.图2为表示图1所示的传感器头部51以及光学系统50的概要结构图。
41.光学系统50具备光源部2、偏振束分离器4、1/4波长板6、1/4波长板8、检偏镜9、受
光元件10、移频型的光调制器12、配置有被测定物14的安置部16。
42.光源部2射出预定波长的出射光l1(第一激光)。受光元件10将接受到的光转换为电信号。光调制器12具备振动元件30,并对出射光l1进行调制,从而生成包含调制信号的参照光l2(第二激光)。虽然安置部16根据需要而被设置即可,但是其被设为能够配置被测定物14。入射至被测定物14的出射光l1作为包含源自被测定物14的采样信号的物体光l3(第三激光)而进行反射。
43.将从光源部2射出的出射光l1的光路设为光路18。光路18通过偏振束分离器4的反射而与光路20结合。在光路20上,从偏振束分离器4侧起依次配置有1/4波长板8以及光调制器12。此外,光路18通过偏振束分离器4的透射而与光路22结合。在光路22上,从偏振束分离器4侧起依次配置有1/4波长板6以及安置部16。
44.光路20通过偏振束分离器4的透射而与光路24结合。在光路24上,从偏振束分离器4侧起依次配置有检偏镜9以及受光元件10。
45.从光源部2被射出的出射光l1经过光路18以及光路20而向光调制器12入射。此外,出射光l1经过光路18以及光路22而向被测定物14入射。由光调制器12所生成的参照光l2经过光路20以及光路24而向受光元件10入射。通过被测定物14上的反射而被生成的物体光l3经过光路22以及光路24而向受光元件10入射。
46.以下,依次对激光干涉仪1的各部分进行说明。
47.1.1.光源部
48.光源部2为,射出具有可干涉性的线宽较细的出射光l1的激光源。在用频率差来表示线宽的情况下,线宽优选使用mhz带以下的激光源。具体而言,能够列举出如hene激光那样的气体激光器、dfb-ld(distributed feedback-laser diode:分布式反馈激光器)、fbg-ld(附有光纤布拉格光栅(fiber bragg grating)的激光二极管(laser diode))、如vcsel(vertical cavity surface emitting laser:垂直腔面射型激光器)那样的半导体激光元件等。
49.光源部2尤其优选为包括半导体激光元件。由此,能够使光源部2尤其小型化。因此,能够实现激光干涉仪1的小型化。尤其是,在激光干涉仪1中,由于能够实现收纳有光学系统50的传感器头部51的小型化以及轻量化,因此在提高激光干涉仪1的操作性这一点上也较为有用。
50.1.2.偏振束分离器
51.偏振束分离器4为,将入射光分割为透射光和反射光的光学元件。此外,偏振束分离器4具有使p偏振光透射并使s偏振光反射的功能,并且能够将入射光的偏振状态分成正交分量。以下,考虑使作为直线偏振且将p偏振光与s偏振光的比例如设为50:50的出射光l1向偏振束分离器4入射的情况。
52.在偏振束分离器4中,如前文所述,使出射光l1的s偏振光反射,并使p偏振光透射。
53.由偏振束分离器4反射出的出射光l1的s偏振光利用1/4波长板8而被转换为圆偏振光,并向光调制器12入射。入射至光调制器12的出射光l1的圆偏振光受到fm[hz]的频移,并作为参照光l2而进行反射。因此,参照光l2包含调制频率fm[hz]的调制信号。参照光l2在再次透射过1/4波长板8时被转换为p偏振光。参照光l2的p偏振光透射过偏振束分离器4以及检偏镜9而向受光元件10入射。
[0054]
透射过偏振束分离器4的出射光l1的p偏振光利用1/4波长板6而被转换为圆偏振光,并向正在运动的状态的被测定物14入射。入射至被测定物14的出射光l1的圆偏振光受到fd[hz]的多普勒频移,并作为物体光l3而进行反射。因此,物体光l3包含频率fd[hz]的频率信号。物体光l3在再次透射过1/4波长板6时被转换为s偏振光。物体光l3的s偏振光利用偏振束分离器4而被反射,并透射过检偏镜9而向受光元件10入射。
[0055]
如前文所述,由于出射光l1具有可干涉性,因此参照光l2以及物体光l3作为干涉光而向受光元件10入射。
[0056]
另外,也可以采用如下方式,即,代替偏振束分离器而使用无偏振束分离器。在此情况下,由于不需要1/4波长板6以及1/4波长板8,因此能够实现由部件数量的削减而导致的激光干涉仪1的小型化。
[0057]
1.3.检偏镜
[0058]
由于相互正交的s偏振光以及p偏振光相互独立,因此仅单纯地使它们重叠不会出现干涉。于是,使s偏振光和p偏振光重叠的光波从相对于s偏振光以及p偏振光双方而倾斜了45
°
的检偏镜9通过。通过使用检偏镜9,从而能够使相互共通的分量彼此的光透射过,并能够使干涉产生。其结果为,在检偏镜9中,调制信号与采样信号发生干涉,从而生成了具有f
m-fd[hz]的频率的干涉光。
[0059]
1.4.受光元件
[0060]
参照光l2以及物体光l3经由偏振束分离器4以及检偏镜9而向受光元件10入射。由此,参照光l2与物体光l3发生光外差干涉,从而具有f
m-fd[hz]的频率的干涉光向受光元件10入射。通过从该干涉光利用后述的方法来对采样信号进行解调,从而最终能够求出被测定物14的运动、即速度或振动。作为受光元件10,例如可列举出光电二极管等。
[0061]
1.5.光调制器
[0062]
图3为表示图2所示的光调制器12的第一结构例的立体图。
[0063]
1.5.1.第一结构例所涉及的光调制器的概要
[0064]
移频型的光调制器12具有光调制振子120。该光调制振子120具备板状的振动元件30和对振动元件30进行支承的基板31。
[0065]
振动元件30由重复进行通过施加电位而进行振动以在沿着面的方向上发生变形的模式的材料构成。在本实施方式中,振动元件30为,在mhz带的高频区域中沿着振动方向36而进行厚度切变振动的水晶at振子。在振动元件30的表面上形成有衍射光栅34。衍射光栅34具有直线状的多个槽32周期性地排列而成的结构。
[0066]
基板31具有互为表背关系的表面311以及背面312。在表面311上配置有振动元件30。此外,在表面311上设置有用于对振动元件30施加电位的衬垫33。另一方面,在背面312上也设置有用于对振动元件30施加电位的衬垫35。
[0067]
基板31的大小例如被设为长边在0.5mm以上且10.0mm以下的程度。此外,基板31的厚度例如被设为在0.1mm以上且2.0mm以下的程度。作为一个示例,基板31的形状被设为一边为1.6mm的正方形,且其厚度被设为0.35mm。
[0068]
振动元件30的大小例如被设为长边在0.2mm以上且3.0mm以下的程度。此外,振动元件30的厚度例如被设为在0.003mm以上且0.5mm以下的程度。
[0069]
作为一个示例,振动元件30的形状被设为一边为1.0mm的正方形,且其厚度被设为
0.07mm。在此情况下,振动元件30以基本振荡频率24mhz而进行振荡。另外,通过改变振动元件30的厚度或者连谐波都考虑到,从而能够在从1mhz到1ghz的范围内对振荡频率进行调整。
[0070]
另外,虽然在图3中衍射光栅34被形成在振动元件30的整个表面上,但是也可以仅被形成在一部分上。
[0071]
由光调制器12实施的光调制的强度由入射至光调制器12的出射光l1的波矢和从光调制器12被射出的出射光l2的波矢的差分波矢、与振动元件30的振动方向36的矢量的内积而给出。虽然在本实施方式中振动元件30进行厚度切变振动,但是由于该振动为面内振动,因此即使让光相对于振动元件30单体的表面而垂直地入射,也无法进行光调制。因此,在本实施方式中,通过在振动元件30中设置衍射光栅34,从而使得能够根据后述的原理而进行光调制。
[0072]
图3所示的衍射光栅34为闪耀光栅。闪耀光栅是指衍射光栅的截面形状成为阶梯状的光栅。衍射光栅34的直线状的槽32被设为其延伸方向相对于振动方向36而正交。
[0073]
当从图1所示的振荡电路54向图3所示的振动元件30供给驱动信号s1(施加交流电压)时,振动元件30进行振荡。虽然振动元件30的振荡所需的电力(驱动功率)并未被特别限定,但是低至0.1μw~100mw的程度。因此,能够不对从振荡电路54输出的驱动信号s1进行放大的条件下用于使振动元件30振荡。
[0074]
1.5.2.衍射光栅的形成方法
[0075]
虽然衍射光栅34的形成方法未被特别限定,但是作为一个示例可列举出通过使用了机械刻线式(刻线机)的方法来制作模型,并在于水晶at振子的振动元件30的表面上成膜了的电极上通过纳米压印法而形成槽32的方法。此处,之所以在电极上,是由于在采用水晶at振子的情况下,原理上能够在电极上产生高品质的厚度切变振动。另外,槽32的形成并未被限定于电极上,也可以在非电极部的材料的表面上。此外,也可以采用如下方式,即,代替纳米压印法而使用由曝光以及蚀刻所实现的加工方法、电子线描画平版印刷法、聚焦离子束加工法(fib)等。
[0076]
此外,也可以采用如下方式,即,在水晶at振子的芯片上利用抗蚀剂材料而形成衍射光栅,并且在此设置金属膜或由电介质多层膜形成的镜膜。通过设置金属膜或镜膜,从而能够提高衍射光栅34的反射率。
[0077]
进一步,也可以采用如下方式,即,在水晶at振子的芯片或晶片上形成抗蚀剂膜并在通过蚀刻而实施了加工之后,将抗蚀剂膜去除,然后,在加工面上形成金属膜或镜膜。在此情况下,由于抗蚀剂材料被去除,因此不存在由抗蚀剂材料的吸湿等而造成的影响,从而能够提高衍射光栅34的稳定性。此外,通过设置如au、al那样的导电性较高的金属膜,从而也能够作为驱动振动元件30的电极来使用。
[0078]
另外,衍射光栅34也可以使用如阳极氧化铝(多孔氧化铝)那样的技术而被形成。
[0079]
1.5.3.其他的结构例所涉及的光调制器
[0080]
振动元件30并未被限定于水晶振子,例如也可以是si振子、弹性表面波(saw)器件等。
[0081]
图4为表示光调制器12的第二结构例的一部分的俯视图。图5为表示光调制器12的第三结构例的俯视图。
[0082]
图4所示的振动元件30a为,使用mems技术而被制造出的si振子。mems(micro electro mechanical systems)是指微机电系统。
[0083]
振动元件30a具备隔着空隙而在同一平面上相邻的第一电极301以及第二电极302、被设置在第一电极301上的衍射光栅载置部303、被设置在衍射光栅载置部303上的衍射光栅34。第一电极301以及第二电极302例如将静电引力作为驱动力,而在图4的左右方向上以重复进行相互接近和远离的方式进行振动。由此,能够对衍射光栅34施加面内振动。si振子的振荡频率例如为从1khz到数百mhz的程度。
[0084]
图5所示的振动元件30b为利用表面波的saw器件。saw(surface acoustic wave:表面声波)是指弹性表面波。
[0085]
振动元件30b具备压电基板305、被设置在压电基板305上的梳齿状电极306、接地电极307、衍射光栅载置部303和衍射光栅34。当对梳齿状电极施加交流电压时,通过逆压电效应而使表面波被励振。由此,能够对衍射光栅34施加面内振动。saw器件的振荡频率例如为从数百mhz到数ghz的程度。
[0086]
对于上述那样的器件,也与水晶at振子的情况同样地,通过设置衍射光栅34,从而能够根据后述的原理来进行光调制。
[0087]
另一方面,在振动元件30具有水晶振子的情况下,能够利用水晶所具有的极高的q值来生成高精度的调制信号。q值为表示共振的峰值的尖锐程度的指标。此外,水晶振子还具有难以受到外部干扰的影响这样的特长。因此,通过使用利用具备水晶振子的光调制器12而被调制出的调制信号,从而能够高精度地取得源自被测定物14的采样信号。
[0088]
1.5.4.由振动元件实现的光调制
[0089]
接下来,使用图3所示的光调制器12来说明对光进行调制的原理。
[0090]
图6为对入射光ki从相对于图3所示的振动元件30的表面而垂直的方向入射时产生多条衍射光的情况进行说明的概念图。
[0091]
当入射光ki向沿着振动方向36而进行厚度切变振动的衍射光栅34入射时,如图6所示那样通过衍射现象而产生多条衍射光k
ns
。n为衍射光k
ns
的次数,且n=0,
±
1,
±
2,
……
。另外,在图6所示的衍射光栅34中,不是图3所示的闪耀光栅,而作为另外的衍射光栅的示例来对由凹凸的重复而形成的衍射光栅进行图示。
[0092]
虽然在图6中入射光ki从相对于振动元件30的表面而垂直的方向入射,但是该入射角并未被特别限定,也可以采用如下方式,即,以相对于振动元件30的表面而倾斜地入射的方式来设定入射角。在被倾斜入射的情况下,衍射光k
ns
的行进方向也与之相对应地发生变化。
[0093]
另外,根据衍射光栅34的设计,有时不会出现
│n│
≥2的高阶的光。因此,为了稳定地得到调制信号,希望设定为
│n│
=1。即,在图2的激光干涉仪1中,移频型的光调制器12优选被配置为,利用
±
1次衍射光以作为参照光l2。通过该配置,从而能够实现由激光干涉仪1所实施的计测的稳定化。
[0094]
另一方面,在从衍射光栅34中出现了
│n│
≥2的高阶的光的情况下,也可以采用如下方式,即,以不利用
±
1次衍射光而是利用
±
2次以上的任意的衍射光以作为参照光l2的方式来配置光调制器12。由此,由于能够利用高阶的衍射光,因此能够实现激光干涉仪1的高频化和小型化。
[0095]
在本实施方式中,作为一个示例,以使向光调制器12入射的入射光ki的进入方向与从光调制器12射出的参照光l2的行进方向所成的角度成为180度的方式来构成光调制器12。以下,对三个结构例进行说明。
[0096]
图7至图9分别为对以使入射光ki的行进方向与参照光l2的行进方向所成的角度成为180度的方式而被构成的光调制器12进行说明的概念图。
[0097]
在图7中,光调制器12除了振动元件30以外还具备镜37。镜37被配置为,对衍射光k
1s
进行反射并使其返回至衍射光栅34。此时,相对于镜37的衍射光k
1s
的入射角与镜37上的反射角所成的角度成为180度。其结果为,从镜37射出并返回至衍射光栅34的衍射光k
1s
利用衍射光栅34而再次衍射,并成为向与入射至光调制器12的入射光ki的行进方向相反的方向行进。因此,通过追加镜37,从而能够满足前述的使入射光ki的进入方向与参照光l2的行进方向所成的角度为180度这样的条件。
[0098]
此外,通过以此方式而经由镜37,从而使得由光调制器12所生成的参照光l2成为受到了两次频率调制的光。因此,与使用振动元件30单体的情况相比,通过并用镜37,从而能够实现更高频的频率调制。
[0099]
在图8中,相对于图6的配置而使振动元件30倾斜。此时的倾斜角度θ被设定为满足前述的入射光ki的进入方向与参照光l2的行进方向所成的角度为180度这样的条件。
[0100]
图9所示的衍射光栅34为具有闪耀角θb的闪耀光栅。并且,当相对于振动元件30的表面的法线n而以入射角β行进的入射光ki向衍射光栅34入射时,参照光l2相对于法线n而以与闪耀角θb相同的角度返回。因此,通过使入射角β与闪耀角θb相等,从而能够满足前述的入射光ki的进入方向与参照光l2的行进方向所成的角度为180度这一条件。在此情况下,由于能够在不使用图7所示的镜37并且如图8所示的那样使振动元件30自身不倾斜的条件下满足所述条件,因此能够实现激光干涉仪1的进一步的小型化以及高频化。尤其在闪耀光栅的情况下,将满足所述条件的配置称为“利特罗配置”,其也具有尤其能够提高衍射光的衍射效率这样的有益效果。
[0101]
另外,图9的齿距p表示闪耀光栅的齿距,作为一个示例,齿距p被设为1μm。此外,闪耀角θb被设为25度。在此情况下,为了满足所述条件,只需将相对于入射光ki的法线n的入射角β也设为25度即可。
[0102]
1.5.5.封装结构
[0103]
图10为表示具有封装结构的光调制器12的剖视图。
[0104]
图10所示的光调制器12具备作为框体的容器70、被收纳在容器70中的光调制振子120以及构成振荡电路54的电路元件45。另外,容器70例如被气密性地密封在真空等减压气氛、或者氮气、氩气等惰性气体气氛中。
[0105]
如图10所示,容器70具有容器主体72和盖体74。其中,容器主体72具有被设置在其内部的第一凹部721、被设置在第一凹部721的内侧且深于第一凹部721的第二凹部722。容器主体72例如由陶瓷材料、树脂材料等构成。此外,虽然并未图示,但是容器主体72具备被设置在内表面上的内部端子、被设置在外表面上的外部端子、将内部端子与外部端子连接的配线等。
[0106]
此外,容器主体72的开口部隔着未图示的密封环或低融点玻璃等封止部件而被盖体74堵塞。盖体74的结构材料使用例如玻璃材料等能够透射过激光的材料。
[0107]
在第一凹部721的底面上配置有光调制振子120。光调制振子120通过未图示的接合部件而被支承在第一凹部721的底面上。此外,容器主体72的内部端子与光调制振子120之间经由例如接合引线、接合金属等未图示的导电材料而被电连接。
[0108]
在第二凹部722的底面上配置有电路元件45。电路元件45经由接合引线76而与容器主体72的内部端子电连接。由此,在光调制振子120与电路元件45之间也经由容器主体72所具备的配线而被电连接。另外,在电路元件45中也可以设置有后述的振荡电路54以外的电路。
[0109]
如上文所述,本实施方式所涉及的光调制器12具备作为对振动元件30进行收纳的框体的容器70。并且,振荡电路54也被收纳在容器70中。
[0110]
通过采用这种封装结构,由于能够将光调制振子120与电路元件45重叠,因此能够使两者的物理距离变近,从而能够缩短光调制振子120与电路元件45之间的配线长度。因此,能够对噪声从外部进入驱动信号s1、或者相反地驱动信号s1成为噪声源的情况进行抑制。此外,能够利用一个容器70而保护光调制振子120与电路元件45双方免受外部环境的影响。因此,能够在实现传感器头部51的小型化的同时提高激光干涉仪1的可靠性。
[0111]
另外,容器70的结构并未被限定于图示的结构,例如,光调制振子120与电路元件45也可以具有独立的封装结构。此外,虽然并未图示,但是在容器70中也可以收纳有构成振荡电路54的其他的电路元件。另外,容器70只需根据需要来设置即可,也可以被省略。
[0112]
2.振荡电路
[0113]
如图1以及图2所示,振荡电路54输出被输入至光学系统50的光调制器12的驱动信号s1。此外,振荡电路54输出被输入至解调电路52的基准信号s2。
[0114]
在振荡电路54中,只要是能够使振动元件30振荡的电路则并不被特别限定,可以使用各种各样的结构的电路。作为一个示例,图11为表示一阶逆变器振荡电路的结构的电路图。
[0115]
图11所示的振荡电路54具备电路元件45、反馈电阻rf、第一限制电阻r1、第二限制电阻r2、第一电容器cg、第二电容器cd和第三电容器c3。
[0116]
电路元件45为逆变器ic。电路元件45的端子x1以及端子x2为分别与逆变器连接的端子。端子gnd与地电位连接,端子vcc与电源电位连接。端子y为用于振荡输出的端子。
[0117]
在端子x1与地电位之间连接有第一电容器cg。此外,在端子x2与地电位之间,从端子x2侧起依次连接有相互串联连接的第一限制电阻r1以及第二电容器cd。而且,在端子x1与第一电容器cg之间连接有反馈电阻rf的一端,在端子x2与第一限制电阻r1之间连接有反馈电阻rf的另一端。
[0118]
此外,在第一限制电阻r1与第二电容器cd之间连接有第二限制电阻r2的一端。而且,在第一电容器cg以及反馈电阻rf与第二限制电阻r2的另一端之间连接有前述的振动元件30。也就是说,振动元件30成为振荡电路54的信号源。
[0119]
此外,图12为振动元件30的lcr等效电路的示例。
[0120]
如图12所示,振动元件30的lcr等效电路由串联电容c1、串联电感l1、等效串联电阻r1以及并联电容c0构成。
[0121]
在这种振荡电路54中,在将第一电容器cg的电容设为cg并将第二电容器cd的电容设为cd时,负载电容c
l
通过以下的式子(a)而被给出。
[0122]
式1
[0123][0124]
这样,从振荡电路54的端子y输出的振荡频率f
osc
通过以下的式子(b)而被给出。
[0125]
式2
[0126][0127]fq
为振动元件30的固有振动数。
[0128]
根据上述式(b)可知,通过适当地改变负载电容c
l
,从而可以对从端子y输出的信号的振荡频率f
osc
进行微调。
[0129]
此外,振动元件30的固有振动数fq与振荡电路54的振荡频率f
osc
之差δf通过以下的式(c)而被给出。
[0130]
式3
[0131][0132]
此处,由于c1<<c0,且c1<<c
l
,因此δf近似地通过以下的式(d)而被给出。
[0133]
式4
[0134][0135]
因此,振荡电路54的振荡频率f
osc
成为与振动元件30的固有振动数fq相应的值。
[0136]
在振动元件30例如被固定于容器70中时,当隔着固定部而受到由温度引起的膨胀应力时,固有振动数fq发生变动。此外,当使振动元件30倾斜时,会受到自重的重力效应等的影响,从而使得固有振动数fq发生变动。
[0137]
在振荡电路54中,即使因这样的理由而使固有振动数fq发生了变动,基于上述式(d),也会以与该变动联动的方式使振荡频率f
osc
发生变化。也就是说,振荡频率f
osc
总是成为从固有振动数fq偏离了δf的值。由此,振动元件30能够稳定地得到位移振幅l0。虽然该位移振幅l0作为b值而在下文中进行叙述,但是其在由光调制器12实施的光调制中成为重要的参数。因此,只要能够使位移振幅l0稳定,则能够使光调制器12的调制特性稳定化,从而能够提高解调电路52中的采样信号的解调精度。
[0138]
作为一个示例,优选为δf=f
osc-fq≤600[hz],进一步优选为240[hz]≤δf≤450。在此情况下,由于位移振幅l0以及b值变得特别高,因此能够使光调制器12的调制特性特别稳定。
[0139]
另外,在代替振荡电路54而使用例如函数发生器或信号发生器等信号生成器的情况下,由于无法像上述那样使振荡频率f
osc
与固有振动数fq的变动联动,因此位移振幅l0有可能变得不稳定。
[0140]
如上文所述,在本实施方式所涉及的激光干涉仪1中具备光源部2、光调制器12、受光元件10、解调电路52、振荡电路54。光源部2将出射光l1(第一激光)射出。光调制器12具备振动元件30,并使用振动元件30来对出射光l1进行调制,从而生成包含调制信号的参照光
l2(第二激光)。受光元件10接受出射光l1在被测定物14(对象物)上反射而生成的包含源自被测定物14的信号的物体光l3(第三激光)、与参照光l2的干涉光,并输出受光信号。解调电路52基于基准信号s2并根据受光信号而对源自被测定物14的信号进行解调。振荡电路54输出被输入至解调电路52的基准信号s2。并且,振动元件30成为振荡电路54的信号源。
[0141]
此处,对现有的激光干涉仪的结构与本实施方式所涉及的激光干涉仪1的结构进行比较。
[0142]
图13为简化地表示现有的激光干涉仪90的结构的图。图14为简化地表示图1的激光干涉仪1的结构的图。
[0143]
图13所示的现有的激光干涉仪90具备声光学调制器(aom)、电光学调制器(eom)等光调制器91、受光元件92、解调电路93、振荡电路94、水晶振子95、放大器96。振荡电路94通过使水晶振子95振荡而产生驱动信号。并且,将利用放大器96而放大了的驱动信号输入至光调制器91,并使光调制器91工作。此外,振荡电路94输出解调电路93中的采样信号的解调所需的基准信号。
[0144]
在现有的激光干涉仪90中在承担光调制的功能的光调制器91与水晶振子95之间有可能发生温度特性的偏离。因此,存在该温度特性的偏离使激光干涉仪90的计测精度下降这样的问题。
[0145]
相对于此,图14所示的本实施方式所涉及的激光干涉仪1具备具有振动元件30的光调制器12、受光元件10、解调电路52、振荡电路54。振荡电路54通过使振动元件30振荡,从而使光调制器12工作。此外,振荡电路54将振动元件30作为信号源并输出解调电路52中的采样信号的解调所需的基准信号s2。
[0146]
因此,根据本实施方式的结构,由于振动元件30承担光调制器12中的光调制的功能,因此调制信号的温度特性与振动元件30的温度特性相对应。另一方面,由于振动元件30承担振荡电路54的信号源的功能,因此从振荡电路54输出至解调电路52的基准信号s2的温度特性也与振动元件30的温度特性相对应。这样,由于调制信号的温度特性与基准信号的温度特性双方与振动元件30的温度特性相对应,因此伴随着温度变化而形成的调制信号的变动的举动与基准信号的变动的举动一致或近似。因此,即使振动元件30的温度发生了变化,也能够抑制对于解调精度的影响,从而能够提高源自被测定物14的采样信号的解调精度。
[0147]
此外,现有的光调制器91也需要维持光调制器91的温度,因此难以减小体积。此外,由于光调制器91的功耗较大,因此具有难以使激光干涉仪90的小型化以及省电化这样的课题。
[0148]
相对于此,在本实施方式中,由于振动元件30的体积非常小,且振荡所要求的电力也较小,因此激光干涉仪1的小型化以及省电化较为容易。
[0149]
此外,如前文所述,振动元件30通过振动而将出射光l1(第一激光)调制为参照光l2(第二激光)。并且,振荡电路54将振动元件30的振动作为源振来产生基准信号s2。
[0150]
根据这样的结构,振动元件30的振动有助于出射光l1的调制与基准信号s2的产生的双方。因此,振动元件30的振动频率会直接影响出射光l1的调制频率与基准信号s2的频率的双方。因此,即使调制频率因振动元件30的温度变化而偏离,由于基准信号s2也同样地偏离,因此在后述的前处理部53的乘法器538中的运算或解调部55的第一乘法器551以及第
二乘法器552中的运算中,温度变化难以造成影响。因此,在原理上,由于温度变化等环境变化难以对运算过程造成影响,因此尤其能够抑制解调精度的下降。
[0151]
3.解调电路
[0152]
解调电路52根据从受光元件10输出的受光信号来实施对源自被测定物14的采样信号进行解调的解调处理。采样信号例如为相位信号或频率信号。能够根据相位信号来取得被测定物14的位移信息。此外,能够根据频率信号来取得被测定物14的速度信息。如果能够以此方式而取得不同的信息,则由于具有作为位移计或速度计的功能,因此能够实现激光干涉仪1的高功能化。
[0153]
解调电路52根据调制处理的方式来设定其电路结构。在本实施方式所涉及的激光干涉仪1中,使用了具备振动元件30的光调制器12。由于振动元件30为单振动的元件,因此振动速度时时刻刻发生变化。因此,调制频率也会发生变化,从而无法就此使用现有的解调电路。
[0154]
现有的解调电路是指,根据包含使用声光学调制器(aom)而被调制出的调制信号的受光信号来对采样信号进行解调的电路。在声光学调制器中,调制频率不发生变化。因此,虽然现有的解调电路能够根据包含由调制频率不发生变化的光调制器来调制出的调制信号的受光信号来对采样信号进行解调,但是在包含由调制频率发生变化的光调制器12来调制出的调制信号的情况下,无法就此进行解调。
[0155]
因此,图1所示的解调电路52具备前处理部53和解调部55。从受光元件10输出的受光信号首先在从前处理部53通过了之后被引导向解调部55。前处理部53对受光信号实施前处理。通过该前处理,从而得到了能够利用现有的解调电路来进行解调的信号。因此,在解调部55中,通过公知的解调方式而对源自被测定物14的采样信号进行解调。
[0156]
3.1.前处理部的结构
[0157]
图1所示的前处理部53具备第一带通滤波器534、第二带通滤波器535、第一延迟调整器536、第二延迟调整器537、乘法器538、第三带通滤波器539、第一agc540、第二agc541、加法器542。另外,agc为auto gain control(自动增益控制)。
[0158]
此外,在前处理部53与受光元件10之间,从受光元件10侧起依次连接有电流电压转换器531以及adc532。
[0159]
而且,在振荡电路54与第二延迟调整器537之间连接有adc533。
[0160]
电流电压转换器531为电流电压转换器,并将来自受光元件10的电流输出转换为电压信号。adc532、533为模数转换器,并以预定的采样位数而将模拟信号转换为数字信号。
[0161]
第一带通滤波器534、第二带通滤波器535以及第三带通滤波器539分别为选择性地使特定的频带的信号透射过的滤波器。
[0162]
第一延迟调整器536以及第二延迟调整器537分别为对信号的延迟进行调整的电路。乘法器538为生成与两个输入信号之积成比例的输出信号的电路。第一agc540以及第二agc541分别为将信号的振幅相互对齐的电路。加法器542为生成与两个输入信号之和成比例的输出信号的电路。
[0163]
从受光元件10输出的电流输出利用电流电压转换器531而被转换为电压信号。电压信号利用adc532而被转换为数字信号,并被分割为第一信号与第二信号这两个信号。
[0164]
第一信号在从第一带通滤波器534通过之后,利用第一延迟调整器536来对群延迟
进行调整。利用第一延迟调整器536来调整的群延迟相当于由后述的第二带通滤波器535引起的第二信号的群延迟。通过该延迟调整,从而能够在第一信号所通过的第一带通滤波器534与第二信号所通过的第二带通滤波器535以及第三带通滤波器539之间使伴随着滤波器电路的通过而形成的延迟时间一致。从第一延迟调整器536通过的第一信号经过第一agc540而被输入至加法器542。
[0165]
第二信号在从第二带通滤波器535通过之后被输入至乘法器538。在乘法器538中,将第二信号乘以从第二延迟调整器537输出的基准信号cos(ωmt)。具体而言,对于从振荡电路54输出的基准信号s2,利用adc533来进行数字转换,并利用第二延迟调整器537而实施相位的调整,进而被输出至乘法器538。然后,第二信号在从第三带通滤波器539通过之后,经过第二agc541而被输入至加法器542。在加法器542中,与第一信号和第二信号之和成比例的输出信号被输出至解调部55。
[0166]
3.2.由前处理部实施的前处理的原理
[0167]
接下来,对前处理部53中的前处理的原理进行说明。首先,在设为如下关系时,即:
[0168]em
=amcos{2π(f0t ∫fm(t)dt) φ
m0
}
ꢀꢀ
(1)
[0169]
ed=adcos{2π(f0t ∫fd(t)dt) φ
d0
}
ꢀꢀ
(2)
[0170]
φ0=φ
m0-φ
d0
ꢀꢀ
(3)
[0171]
从受光元件10输出的受光信号强度i
pd
逻辑上由下式来表示。
[0172]
式6
[0173][0174]
另外,em、ed、φ
m0
、φ
d0
、φ0、fm(t)、fd(t)、f0、am、ad分别代表如下内容。
[0175]
式7
[0176]em
:调制信号的电场分量
[0177]
ed:源自被测定物的采样信号的电场分量
[0178]
φ
m0
:光路20的初始相位值
[0179]
φ
d0
:光路22的初始相位值
[0180]
φ0:激光干涉仪的光路相位差
[0181]fm
(t):源自光调制器的调制信号的频率
[0182]
fd(t):源自被测定物的采样信号的频率
[0183]
f0:从光源部射出的出射光的频率
[0184]am
:系数
[0185]ad
:系数
[0186]
此外,式(4)中的《》表示时间平均。
[0187]
另外,f0作为一个示例为300thz左右,fm(t)作为一个示例为100khz~100mhz左右,fd(t)作为一个示例为1khz~10mhz左右。
[0188]
上述式(4)的第一项表示直流分量,第二项表示交流分量。如将该交流分量设为i
pd.ac
,则i
pd.ac
如下式所示。
[0189]
式8
[0190][0191][0192]
x(t)=-∫fd(t)dt φ0ꢀꢀ
(7)
[0193]fmdmax
:光调制器的最大调制频率
[0194]fm
:光调制器的调制频率
[0195]
而且,i
pd.ac
能够以如下方式进行变形。
[0196]
式9
[0197]ipd.ac
=acos(bsin2πfmt x(t))
[0198]
=a{cosbsin2πfmt
·
cosx(t)-sinbsin2πfmt
·
sinx(t)}
ꢀꢀ
(8)
[0199]
a=a
mad
ꢀꢀ
(9)
[0200][0201]
此处,已知如下式那样的v次贝塞尔函数。
[0202]
式10
[0203]
cos{ζsin(2πfvt)}=j0(ζ) 2j2(ζ)cos(2
·
2πfvt) 2j4(ζ)cos(4
·
2πfvt)
…ꢀꢀ
(11)
[0204]
sin{ζsin(2πfvt)}=2j1(ζ)sin(1
·
2πfvt) 2j3(ζ)sin(3
·
2πfvt)
…ꢀꢀ
(12)
[0205]
如果使用上述式(11)以及式(12)的贝塞尔函数而将上述式(8)级数展开,则能够以如下方式进行变形。
[0206]
式11
[0207]ipd.ac
=a[{j0(b) 2j2(b)cos(2
·
2πfmt) 2j4(b)cos(4
·
2πfmt)
…
}cosx(t)-{2j1(b)sin(1
·
2πfmt) 2j3(b)sin(3
·
2πfmt)
…
}sinx(t)]
ꢀꢀ
(13)
[0208]
但是,j0(b)、j1(b)、j2(b)、
…
分别为贝塞尔系数。
[0209]
并且,展开后的各项中的振动频率的次数和系数的关系如以下的表1所示。
[0210]
表1
[0211]
表1
[0212][0213]
当以上述方式而展开时,可以说在逻辑上能够通过带通滤波器而抽取与特定的次数对应的波段。
[0214]
因此,在前述的前处理部53中,基于该逻辑而以如下的流程来对受光信号实施前
处理。
[0215]
首先,从前述的adc532输出的数字信号被分割为第一信号和第二信号这两个信号。第一信号从第一带通滤波器534通过。第一带通滤波器534将中心角频率设定为ωm。由此,从第一带通滤波器534通过后的第一信号进一步利用第一延迟调整器536以及第一agc540而对相位以及振幅进行了调整的结果由下式来表示。
[0216]
式12
[0217]ipass1
=csin(2πfmt)
·
sinx(t)
ꢀꢀ
(14)
[0218]
另一方面,第二信号从第二带通滤波器535通过。第二带通滤波器535的中心角频率被设定为与第一带通滤波器534的中心角频率不同的值。此处,作为一个示例,第二带通滤波器535的中心角频率被设定为2ωm。由此,从第二带通滤波器535通过后的第二信号由下式来表示。
[0219]
式13
[0220]ibpf2
=2j2(b)cos(2
·
2πfmt)
·
cosx(t)
[0221]
=j2(b){cos(2
·
2πfmt x(t)) cos(2
·
2πfmt-x(t))}
ꢀꢀ
(15)
[0222]
利用乘法器538而将从第二带通滤波器535通过后的第二信号与基准信号cos(ωmt)相乘。相乘后的第二信号由下式所表示。
[0223]
式14
[0224]icos
(ωmt)=j2(b){cos(2
·
2πfmt x(t)) cos(2
·
2πfmt-x(t))}
·
cos(2πfmt)
[0225]
=j2(b){cos(3
·
2πfmt x(t)) cos(1
·
2πfmt x(t)) cos(3
·
2πfmt-x(t)) cos(1
·
2πfmt-x(t))}
ꢀꢀ
(16)
[0226]
从乘法器538通过后的第二信号从第三带通滤波器539通过。第三带通滤波器539的中心角频率被设定为与第一带通滤波器534的中心角频率相同的值。此处,作为一个示例,第三带通滤波器539的中心角频率被设定为ωm。由此,从第三带通滤波器539通过后的第二信号由下式来表示。
[0227]
式15
[0228]ibpf3
=j2(b){cos(2πfmt x(t)) cos(2πfmt-x(t))}
[0229]
=2j2(b)cos(2πfmt)
·
cosx(t)
ꢀꢀ
(17)
[0230]
从第三带通滤波器539通过后的第二信号利用第二agc541而与第一信号的振幅一致的结果由下式来表示。
[0231]
式16
[0232]ipass2
=ccos(2πfmt)
·
cosx(t)
ꢀꢀ
(18)
[0233]
由上述式(14)所表示的第一信号以及由上述式(18)所表示的第二信号通过加法器542而被相加在一起。相加结果由下式来表示。
[0234]
式17
[0235]i53
=cos(2πfmt-x(t))
ꢀꢀ
(19)
[0236]
如上述式(19)那样,作为相加的结果,能够消除不必要的项并取出必要项。该结果被输出至解调部55。另外,虽然通过前处理部53使用了adc的数字处理而进行了说明,但是也可以为不具有adc的模拟电路结构。
[0237]
3.3.解调部的结构
[0238]
解调部55根据从前处理部53输出的信号而实施对源自被测定物14的采样信号进行解调的解调处理。虽然作为解调处理而并未被特别限定,但是可以列举出公知的正交检波法。正交检波法为,通过对输入信号实施从外部混合相互正交的信号的操作从而实施解调处理的方法。
[0239]
图1所示的解调部55为具备第一乘法器551、第二乘法器552、移相器553、第一低通滤波器555、第二低通滤波器556、除法器557、反正切运算器558、信号输出电路559的数字电路。
[0240]
3.4.由解调部实施的解调处理的原理
[0241]
在解调处理中,首先,将从前处理部53输出的信号分割为两个信号。在第一乘法器551中,将分割后的一个信号与作为从振荡电路54输出的基准信号s2的频率信号cos(ωmt)相乘。在第二乘法器552中,将分割后的另一个信号与利用移相器553而使从振荡电路54输出的基准信号s2的相位移位了-90
°
的频率信号-sin(ωmt)相乘。频率信号cos(ωmt)与频率信号-sin(ωmt)为相位彼此偏离了90
°
的信号。
[0242]
通过了第一乘法器551的信号从第一低通滤波器555通过,然后,作为信号x而被输入至除法器557。通过了第二乘法器552的信号也从第二低通滤波器556通过,然后,作为信号y而被输入至除法器557。在除法器557中实施信号y除以信号x的除法运算,并使信号y/x通过反正切运算器558从而求出信号atan(y/x)。
[0243]
然后,通过使信号atan(y/x)从信号输出电路559通过,从而求出相位φd以作为源自被测定物14的采样信号。并且,能够基于相位φd来对被测定物14的位移信息进行计算。由此,实现了对被测定物14的位移进行计测的位移计。此外,能够根据位移信息来求出速度信息。由此,实现了对被测定物14的速度进行计测的速度计。
[0244]
以上,虽然对解调部55的电路结构进行了说明,但是上述的数字电路的电路结构为一个示例,并不限定于此。此外,解调部55并不限定于数字电路,也可以是模拟电路。在模拟电路中,也可以包括f/v逆变器电路或δσ计数器电路。
[0245]
此外,也可以采用如下方式,即,上述的解调部55的电路结构求出频率信号,以作为源自被测定物14的采样信号。能够基于频率信号来对被测定物14的速度信息进行计算。
[0246]
4.相位的振幅
[0247]
根据由前述的前处理部53实施的前处理的原理也可知,为了稳定地实施前处理,从而需要受光信号的交流分量中的前述的表1所示的1
·
ωm的信号分量和2
·
ωm的信号分量的双方。
[0248]
图15为表示受光信号的波形的一个示例的曲线图。如前文所述,受光信号被分为直流分量和交流分量。在图15中,为了再现激光干涉仪1的光路相位差φ0可取的各种各样的状态,而给予φ0平缓的周期变动。因此,在图15中,直流分量cos(φ0)与长波的周期相对应,并且交流分量cos(ψ
m-ψd φ0)与短波的周期相对应。ψm为由光调制器12所产生的调制信号的相位,并且由ψm=bsin(ωmt)来表示。ψd为源自被测定物14的采样信号的相位。另外,在图15中设为ψd=0。此外,作为一个示例而设为b=0.27。
[0249]
长波的周期以及短波的周期将会根据计测条件而发生各种变化。因此,不论是进行怎样的运动的被测定物14,为了实施稳定的计测,也谋求表示受光信号的线进入记载为图15的“最佳区域”的两个区域中。最佳区域是指,在受光信号的交流分量中,出现了前述的1·
ωm的信号分量和2
·
ωm的信号分量的双方的区域。也就是说,如图15所示,在从最佳区域偏离的情况下,1
·
ωm的信号分量会消失,或者2
·
ωm的信号分量会消失。
[0250]
因此,为了进入前述的“最佳区域”,只要使交流分量中的ψm φ0的振幅大于π/3即可。此外,优选为大于π/2。
[0251]
在此基础上,在将调制信号的相位ψm的变化振幅设为δψm并将采样信号的相位ψd的变化振幅设为δψd时,只要至少使δψm δψd>π/3成立即可。并且,δψm优选为趋向于π/3而尽可能较大。由此,能够实现稳定的计测。
[0252]
另外,根据前述的ψm=bsin(ωmt)的算式,调制信号的相位ψm的变化振幅δψm成为b这一值。因此,在振动元件30的选定时,b值优选为趋向于π/3而尽可能较大。作为一个示例,b值优选为大于0.5,且更优选为大于π/3。由此,即使被测定物14的位移更微小,也能够稳定地实施计测。
[0253]
此外,b值能够换算为振动元件30的位移振幅l0。例如,在出射光l1的波长为632nm的情况下,为了满足b>π/3,从而只要使l0>69.5nm即可。此外,在出射光l1的波长为850nm的情况下,为了满足b>π/3,从而只要使l0>93.4nm即可。因此,在振动元件30的选定时,也可以将位移振幅l0选定为标准。
[0254]
另外,这些数值通过以下的方式而被求出。
[0255]
根据所述式(10),b=f
mdmax
/fm。此外,f
mdmax
=(4π
·fm
·
l0·
sinθ)/λ。另外,λ为出射光l1的波长,θ为图8所示的倾斜角度。
[0256]
由此,(4πl0sinθ)/λ>π/3成立。其结果为,成为l0>λ/(12sinθ)。因此,例如在设为θ=49.3
°
时,在上述的λ=632nm的情况下,成为l0>69.5nm[=632/{12
×
sin(49.3)}]。此外,在λ=850nm的情况下,成为l0>93.4nm[=850/{12
×
sin(49.3)}]。
[0257]
图16为表示振荡电路54的负载电容c
l
与对于作为被测定物14的压电元件的位移振幅的计测结果的精度的关系的曲线图。另外,图16的纵轴为利用激光干涉仪1而对压电元件的位移振幅进行计测且计测结果相对于真实值80.3nm的标准偏差σ的比值。以下,将该值称为“解调精度”。
[0258]
在图16中,认为通过将振荡电路54的负载电容c
l
设为预定的值以上从而实现1%以下的解调精度。在图16的示例中,通过将负载电容c
l
设为50pf以上,从而能够实现1%以下的解调精度。在振动元件30的固有振动数fq为4,971,886hz的情况下,当基于所述式(d)而将负载电容c
l
设为50pf以上这样的阈值换算为δf时,成为δf≤600[hz]。因此,通过满足该条件,从而能够在激光干涉仪1中实现良好的解调精度。
[0259]
5.变形例
[0260]
接下来,对变形例所涉及的激光干涉仪进行说明。
[0261]
图17为表示第一变形例所涉及的激光干涉仪所具备的光学系统的安装结构的概要结构图。图18为表示第二变形例所涉及的激光干涉仪所具备的光学系统的安装结构的概要结构图。图19为表示第三变形例所涉及的激光干涉仪所具备的光学系统的安装结构的概要结构图。图20为表示第四变形例所涉及的激光干涉仪所具备的光学系统的安装结构的概要结构图。
[0262]
以下,虽然对变形例进行说明,但是在以下的说明中,以与所述实施方式的不同点为中心来进行说明,对于同样的事项则省略其说明。另外,在图17至图20中,对与所述实施
方式同样的结构标记相同的符号。
[0263]
图17所示的激光干涉仪1的光学系统50a具备基板39。光源部2、光调制器12以及受光元件10被分别安装在该基板39上。并且,在基板39上,沿着与图17所示的光路22正交的方向而依次排列配置有受光元件10、光源部2以及光调制器12。
[0264]
此外,图17所示的光学系统50a具备棱镜40、42。棱镜40被设置在受光元件10与检偏镜9之间的光路24上。棱镜42被设置在光调制器12与1/4波长板8之间的光路20上。
[0265]
而且,图17所示的光学系统50a具备凸透镜44。凸透镜44被设置在光源部2与偏振束分离器4之间的光路18上。通过设置凸透镜44而使从光源部2射出的出射光l1聚集,从而能够进行有效利用。
[0266]
图18所示的激光干涉仪1的光学系统50b除了元件等的配置不同以外,均与图17所示的光学系统50a相同。
[0267]
在图18所示的基板39上,沿着与图18所示的光路22正交的方向而依次排列配置有光源部2、受光元件10以及光调制器12。棱镜40被设置在光路18上,棱镜42被设置在光路20上。
[0268]
图19所示的激光干涉仪1的光学系统50c具有在连结被测定物14与受光元件10的光路上装入有光调制器12的配置。
[0269]
在图19所示的基板39上,沿着与图19所示的光路22正交的方向而依次排列配置有光源部2、光调制器12以及受光元件10。棱镜40被设置在光路18上,棱镜42被设置在光路24上。
[0270]
根据上述那样的图17至图19所示的安装结构,从而能够容易地实现激光干涉仪1的小型化。另外,元件的配置并未被限定于图示的配置。
[0271]
在图17至图19所示的安装结构中,受光元件10的尺寸例如为0.1mm见方,光源部2的尺寸例如为0.1mm见方,光调制器12的尺寸例如为0.5~10mm见方。并且,安装它们的基板39的尺寸例如被设为1~10mm见方。由此,能够实现激光干涉仪1的小型化至该基板39的尺寸程度。
[0272]
图20所示的激光干涉仪1的光学系统50d除了以下几点不同以外,均与所述实施方式的光学系统50相同。
[0273]
首先,光学系统50d代替所述实施方式的受光元件10而具备受光元件10a、10b。此外,除了偏振束分离器4以外,光学系统50d还具备偏振束分离器4a。偏振束分离器4a使p偏振光透射过,且使s偏振光反射。而且,光学系统50d具备1/2波长板17a、17b、凸透镜44、镜48。并且,具备安装光源部2以及受光元件10a、10b的基板39。
[0274]
1/2波长板17a、偏振束分离器4a以及镜48在偏振束分离器4与受光元件10b之间的光路24上从偏振束分离器4侧起依次被配置。
[0275]
1/2波长板17b以及凸透镜44在光路18上从偏振束分离器4侧起依次被配置。
[0276]
此外,图20所示的激光干涉仪1具备差动放大电路56,其对从受光元件10a输出的受光信号和从受光元件10b输出的受光信号进行差动处理以及放大处理。
[0277]
在受光元件10a中入射有利用偏振束分离器4a而反射的s偏振光。另一方面,在受光元件10b中入射有透射过偏振束分离器4a并利用镜48而反射的p偏振光。
[0278]
入射至受光元件10a的s偏振光的受光信号强度i
pd1
由下式来表示。
[0279]
式18
[0280][0281]
入射至受光元件10b的p偏振光的受光信号强度i
pd2
由下式来表示。
[0282]
式19
[0283][0284]
在上述式(20)、(21)中,第一项表示直流分量,第二项表示交流分量。
[0285]
于是,差动放大电路56实施对受光信号强度i
pd1
与受光信号强度i
pd2
的差分i
pd1-i
pd2
进行计算的差动处理。作为该处理的结果,直流分量被消除,并且差分i
pd1-i
pd2
如下式那样仅由被放大了的交流分量来表示。
[0286]
式20
[0287]ipd1-pd2
=2a
mad
cos(2πfmt-x(t))
ꢀꢀ
(22)
[0288]
因此,根据本变形例,通过使用两个受光元件10a、10b来实施差动处理,从而能够消除在采样信号的解调中成为噪声的直流分量,且能够以更大的强度来取得交流分量。因此,能够进一步提高采样信号的解调精度。
[0289]
在以上那样的变形例中,能够获得与所述实施方式同样的效果。
[0290]
以上,虽然基于图示的实施方式来对本发明的激光干涉仪进行了说明,但是本发明的激光干涉仪并未被限定于所述实施方式,能够将各部分的结构置换为具有同样的功能的任意的结构。此外,也可以在所述实施方式所涉及的激光干涉仪中附加其他的任意的结构物。
[0291]
符号的说明
[0292]1…
激光干涉仪;2
…
光源部;4
…
偏振束分离器;4a
…
偏振束分离器;6
…
1/4波长板;8
…
1/4波长板;9
…
检偏镜;10
…
受光元件;10a
…
受光元件;10b
…
受光元件;12
…
光调制器;14
…
被测定物;16
…
安置部;17a
…
1/2波长板;17b
…
1/2波长板;18
…
光路;20
…
光路;22
…
光路;24
…
光路;30
…
振动元件;30a
…
振动元件;30b
…
振动元件;31
…
基板;32
…
槽;33
…
衬垫;34
…
衍射光栅;35
…
衬垫;36
…
振动方向;37
…
镜;39
…
基板;40
…
棱镜;42
…
棱镜;44
…
凸透镜;45
…
电路元件;48
…
镜;50
…
光学系统;50a
…
光学系统;50b
…
光学系统;50c
…
光学系统;50d
…
光学系统;51
…
传感器头部;52
…
解调电路;53
…
前处理部;54
…
振荡电路;55
…
解调部;56
…
差动放大电路;70
…
容器;72
…
容器主体;74
…
盖体;76
…
接合引线;90
…
激光干涉仪;91
…
光调制器;92
…
受光元件;93
…
解调电路;94
…
振荡电路;95
…
水晶振子;96
…
放大器;120
…
光调制振子;301
…
第一电极;302
…
第二电极;303
…
衍射光栅载置部;305
…
压电基板;306
…
梳齿状电极;307
…
接地电极;311
…
表面;312
…
背面;531
…
电流电压转换器;532
…
adc;533
…
adc;534
…
第一带通滤波器;535
…
第二带通滤波器;536
…
第一延迟调整器;537
…
第二延迟调整器;538
…
乘法器;539
…
第三带通滤波器;542
…
加法器;551
…
第一乘法器;552
…
第二乘法器;553
…
移相器;555
…
第一低通滤波器;556
…
第二低通滤波器;557
…
除法器;558
…
反正切运算器;559
…
信号输出电路;721
…
第一凹部;722
…
第二凹部;540
…
第一agc;541
…
第二agc;c0…
并联电容;c1…
串联电容;c3
…
第三电容器;cd
…
第二电容器;cg
…
第一电容器;gnd
…
端子;l1
…
出射光;l1…
串联电感;l2
…
参照光;l3
…
物体光;n
…
法线;p
…
齿距;r1…
等效串联电阻;r1
…
第一限制电阻;r2
…
第二限制电阻;rf
…
反馈电阻;s1
…
驱动信号;s2
…
基准信号;vcc
…
端子;x1
…
端子;x2
…
端子;y
…
端子;x
…
信号;y
…
信号;β
…
入射角;θ
…
倾斜角度;θb…
闪耀角。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。