1.本发明涉及姿态识别技术领域,具体为一种人体姿态识别毫米波雷达系统。
背景技术:
2.毫米波雷达使用毫米波通常是指30~300ghz频域(波长为1~10mm)的。毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。同厘米波导引头相比,毫米波导引头具有体积小、质量轻和空间分辨率高的特点。与红外、激光、电视等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的特点,目前经常用毫米波雷达来识别人体姿态的信息。
3.但是目前在对人体姿态进行识别时,其效果低,精度差,从而使得识别人体姿态后的信息不够完善,这样就会增加人工的劳动强度,没有对此缺陷进行相应的改进。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种人体姿态识别毫米波雷达系统,解决了目前在对人体姿态进行识别时,其效果低,精度差,从而使得识别人体姿态后的信息不够完善,这样就会增加人工的劳动强度的问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:一种人体姿态识别毫米波雷达系统,包括中央处理器和识别系统以及处理系统,所述识别系统用于对人体姿态的识别,所述处理系统用于对识别的数据进行处理。
6.所述识别系统包括有定位追踪模块和发射信号模块、回波信号模块、信号放大模块、中频信号模块、特征提取模块、空间变化模块、识别算法模块以及结果输出模块,所述定位追踪模块用于对路径的追踪,所述发射信号模块用于发射雷达信号,所述回波信号模块用于对信号的回波,所述信号放大模块用于对信号的放大,所述中频信号模块用于将高频信号转换为中频信号,所述特征提取模块用于对姿态特征信息的提取,空间变化模块用于对姿态信息空间变化的提取,所述识别算法模块根据姿态变化的信息进行计算识别,所述结果输出模块用于输出识别的结果。
7.优选的,所述定位追踪模块与发射信号模块电性连接,所述发射信号模块与回波信号模块电性连接,所述回波信号模块与信号放大模块电性连接,所述信号放大模块与中频信号模块电性连接,所述中频信号模块与特征提取模块电性连接,所述特征提取模块与空间变化模块电性连接,所述空间变化模块与识别算法模块电性连接,所述识别算法模块与结果输出模块电性连接。
8.优选的,所述识别算法模块的算法公式如下:
[0009][0010]
优选的,所述算法公式中,r为雷达至参考点的距离,f为雷达发射信号的频率,sk为第k个散射中心的强度,c为电磁波的速度,θ为目标方位角,为第k个散射点中心的位置坐
标。
[0011]
优选的,所述处理系统包括有数据接收模块和数据分析模块、模型系统、数据比较模块、数据库、姿态判断模块以及自动分类模块,所述数据接收模块与数据分析模块电性连接,所述数据分析模块分别与模型系统和数据比较模块电性连接,所述数据库与数据比较模块电性连接,所述数据比较模块与姿态判断模块电性连接,所述姿态判断模块与自动分类模块电性连接。
[0012]
优选的,所述数据接收模块用于对识别的信息数据进行接收,所述数据分析模块用于对数据的分析,所述模型系统用于模型的建立,所述数据库用于储存人体姿态的数据信息,所述数据比较模块用于将识别的姿态与数据库中的姿态进行比较分析,所述姿态判断模块用于对姿态的信息进行判断,所述自动分类模块用于对姿态信息的分类。
[0013]
优选的,所述模型系统包括有目标确定模块和模型建立模块、模型演示模块、云计算模块、自动匹配模块以及自动匹配模块,所述目标确定模块与模型建立模块电性连接,所述模型建立模块与模型演示模块电性连接,所述模型演示模块与云计算模块电性连接,所述云计算模块与自动匹配模块电性连接,所述自动匹配模块与自动成像模块电性连接。
[0014]
优选的,所述目标确定模块用于对目标的确定,所述模型建立模块用于建立模型,所述模型演示模块用于对建立的模型进行演示,所述云计算模块用于对演示的模型进行云计算,所述自动匹配模块用于对计算的数据与识别的数据进行匹配,所述自动成像模块将匹配的信息给显示出来。
[0015]
优选的,所述云计算模块的计算公式如下:
[0016][0017]
优选的,所述公式中,是第j层第j个到第k层第k个的权值,∑是j层所有输出与k的连接。
[0018]
有益效果
[0019]
本发明提供了一种人体姿态识别毫米波雷达系统,与现有技术相比具备以下有益效果:
[0020]
1、该人体姿态识别毫米波雷达系统,能够对人体的姿态进行很好的识别工作,且能够保证识别信号的稳定性,进而保证姿态特征提取的精确性,降低环境对识别过程造成的干扰,进而降低了人工的劳动强度。
[0021]
2、该人体姿态识别毫米波雷达系统,能够自动建立模型,使得数据与模型相结合的方式,能够根据人体姿态进行演示,与人体姿态进行相匹配,再一步保证了识别的精确性。
附图说明
[0022]
图1为本发明的原理框图;
[0023]
图2为本发明识别系统的原理框图;
[0024]
图3为本发明处理系统的原理框图;
[0025]
图4为本发明模型系统的原理框图;
[0026]
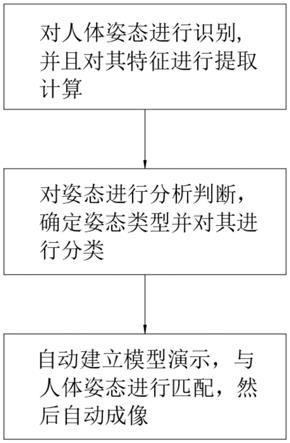
图5为本发明的工作流程框图。
[0027]
图中:1、中央处理器;2、识别系统;21、定位追踪模块;22、发射信号模块;23、回波信号模块;24、信号放大模块;25、中频信号模块;26、特征提取模块;27、空间变化模块;28、识别算法模块;29、结果输出模块;3、处理系统;31、数据接收模块;32、数据分析模块;33、模型系统;331、目标确定模块;332、模型建立模块;333、模型演示模块;334、云计算模块;335、自动匹配模块;336、自动成像模块;34、数据比较模块;35、数据库;36、姿态判断模块;37、自动分类模块。
具体实施方式
[0028]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0029]
请参阅图1,本发明提供一种技术方案:一种人体姿态识别毫米波雷达系统,包括中央处理器1和识别系统2以及处理系统3,识别系统2用于对人体姿态的识别,处理系统3用于对识别的数据进行处理。
[0030]
请参阅图2,本发明实施例中,识别系统2包括有定位追踪模块21和发射信号模块22、回波信号模块23、信号放大模块24、中频信号模块25、特征提取模块26、空间变化模块27、识别算法模块28以及结果输出模块29,定位追踪模块21用于对路径的追踪,发射信号模块22用于发射雷达信号,回波信号模块23用于对信号的回波,信号放大模块24用于对信号的放大,中频信号模块25用于将高频信号转换为中频信号,特征提取模块26用于对姿态特征信息的提取,空间变化模块27用于对姿态信息空间变化的提取,识别算法模块28根据姿态变化的信息进行计算识别,结果输出模块29用于输出识别的结果,定位追踪模块21与发射信号模块22电性连接,发射信号模块22与回波信号模块23电性连接,回波信号模块23与信号放大模块24电性连接,信号放大模块24与中频信号模块25电性连接,中频信号模块25与特征提取模块26电性连接,特征提取模块26与空间变化模块27电性连接,空间变化模块27与识别算法模块28电性连接,识别算法模块28与结果输出模块29电性连接,识别算法模块28的算法公式如下:
[0031][0032]
算法公式中,r为雷达至参考点的距离,f为雷达发射信号的频率,sk为第k个散射中心的强度,c为电磁波的速度,θ为目标方位角,xk,yk为第k个散射点中心的位置坐标。
[0033]
请参阅图3,本发明实施例中,处理系统3包括有数据接收模块31和数据分析模块32、模型系统33、数据比较模块34、数据库35、姿态判断模块36以及自动分类模块37,数据接收模块31与数据分析模块32电性连接,数据分析模块32分别与模型系统33和数据比较模块34电性连接,数据库35与数据比较模块34电性连接,数据比较模块34与姿态判断模块36电性连接,姿态判断模块36与自动分类模块37电性连接,数据接收模块31用于对识别的信息数据进行接收,数据分析模块32用于对数据的分析,模型系统33用于模型的建立,数据库35用于储存人体姿态的数据信息,数据比较模块34用于将识别的姿态与数据库35中的姿态进
行比较分析,姿态判断模块36用于对姿态的信息进行判断,自动分类模块37用于对姿态信息的分类。
[0034]
请参阅图4,本发明实施例中,模型系统33包括有目标确定模块331和模型建立模块332、模型演示模块333、云计算模块334、自动匹配模块335以及自动匹配模块335,目标确定模块331与模型建立模块332电性连接,模型建立模块332与模型演示模块333电性连接,模型演示模块333与云计算模块334电性连接,云计算模块334与自动匹配模块335电性连接,自动匹配模块335与自动成像模块336电性连接,目标确定模块331用于对目标的确定,模型建立模块332用于建立模型,模型演示模块333用于对建立的模型进行演示,云计算模块334用于对演示的模型进行云计算,自动匹配模块335用于对计算的数据与识别的数据进行匹配,自动成像模块336将匹配的信息给显示出来,云计算模块334的计算公式如下:
[0035][0036]
公式中,是第j层第j个到第k层第k个的权值,∑是j层所有输出与k的连接。
[0037]
同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。
[0038]
工作原理:请参阅图5,本发明实施例中,定位追踪模块21用于对路径的追踪,发射信号模块22用于发射雷达信号,回波信号模块23用于对信号的回波,信号放大模块24用于对信号的放大,中频信号模块25用于将高频信号转换为中频信号,特征提取模块26用于对姿态特征信息的提取,空间变化模块27用于对姿态信息空间变化的提取,识别算法模块28根据姿态变化的信息进行计算识别,结果输出模块29用于输出识别的结果,数据接收模块31用于对识别的信息数据进行接收,数据分析模块32用于对数据的分析,模型系统33用于模型的建立,数据库35用于储存人体姿态的数据信息,数据比较模块34用于将识别的姿态与数据库35中的姿态进行比较分析,姿态判断模块36用于对姿态的信息进行判断,自动分类模块37用于对姿态信息的分类,目标确定模块331用于对目标的确定,模型建立模块332用于建立模型,模型演示模块333用于对建立的模型进行演示,云计算模块334用于对演示的模型进行云计算,自动匹配模块335用于对计算的数据与识别的数据进行匹配,自动成像模块336将匹配的信息给显示出来。
[0039]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。