技术特征:
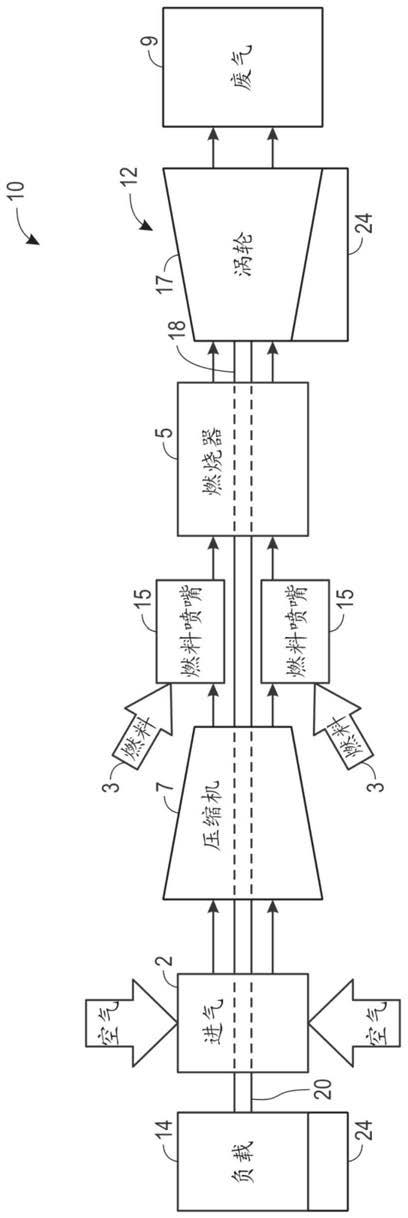
1.一种气体涡轮系统(10),所述气体涡轮系统包括:存储器(74),所述存储器存储指令;和处理器(76),所述处理器被配置为执行所述指令以使得所述处理器(76):接收数据信号(52),所述数据信号指示所述气体涡轮系统(10)的气体涡轮(12)与所述气体涡轮系统(10)的负载(14)之间的相对位置和/或取向;基于指示所述相对位置和/或取向的所述数据信号(52)来确定所述气体涡轮(12)、所述负载(14)或两者的目标移动;基于所述目标移动来确定对准组件(24)的调节垫(90)、液压缸(92)或两者的至少一个控制命令(82),所述对准组件(24)联接到所述气体涡轮(12)或所述负载(14);以及通过所述至少一个控制命令(82)来控制所述调节垫(90)、所述液压缸(92)或两者的移动。2.根据权利要求1所述的气体涡轮系统(10),其中所述对准组件(24)还包括至少一个激光对准设备(40,42),所述至少一个激光对准设备被配置为确定所述气体涡轮系统(10)的所述气体涡轮(12)与所述气体涡轮系统(10)的所述负载(14)之间的所述相对位置和/或取向,其中所述处理器(76)被配置为从所述至少一个激光对准设备(40,42)接收所述数据信号(52)。3.根据权利要求2所述的气体涡轮系统(10),其中所述至少一个激光对准设备(40,42)包括激光发射器(40)、激光接收器(42)或两者。4.根据权利要求2所述的气体涡轮系统(10),其中所述至少一个激光对准设备(40,42)包括红外发射器(40)、红外接收器(42)或两者。5.根据权利要求1所述的气体涡轮系统(10),所述气体涡轮系统包括:所述气体涡轮(12)的气体涡轮轴(18);所述负载(14)的负载轴(20);激光对准发射器(40),所述激光对准发射器设置在所述气体涡轮轴(18)或所述负载轴(20)中的一者上;和激光对准接收器(42),所述激光对准接收器设置在所述气体涡轮轴(18)或所述负载轴(20)中的另一者上。6.根据权利要求1所述的气体涡轮系统(10),其中所述处理器(76)被配置为执行所述指令以使得所述处理器(76):接收附加数据信号(52),所述附加数据信号指示所述气体涡轮系统(10)的所述气体涡轮(12)与所述气体涡轮系统(10)的所述负载(14)之间的改变的相对位置和/或取向;以及基于指示所述改变的相对位置和/或取向的所述附加数据信号(52)来确定所述气体涡轮(12)、所述负载(14)或两者的实际移动。7.根据权利要求6所述的气体涡轮系统(10),其中所述处理器(76)被配置为执行所述指令以使得所述处理器(76):确定所述实际移动与所述目标移动之间的差异;基于指示所述改变的相对位置和/或取向的所述附加数据信号(52)来确定所述气体涡轮(12)、所述负载(14)或两者的附加目标移动;以及基于所述附加目标移动和所述实际移动与所述目标移动之间的所述差异来确定所述
调节垫(90)、所述液压缸(92)或两者的附加的至少一个控制命令(82)。8.根据权利要求7所述的气体涡轮系统(10),其中所述处理器(76)被配置为执行所述指令以使得所述处理器(76)通过所述附加的至少一个控制命令(82)来控制所述调节垫(90)、所述液压缸(92)或两者的附加移动。9.根据权利要求1所述的气体涡轮系统(10),其中所述处理器(76)被配置为执行所述指令以使得所述处理器(76):接收附加数据信号(52),所述附加数据信号指示所述气体涡轮系统(10)的所述气体涡轮(12)与所述气体涡轮系统(10)的所述负载(14)之间的改变的相对位置和/或取向;基于指示所述改变的相对位置和/或取向的所述附加数据信号(52)来确定所述气体涡轮(12)、所述负载(14)或两者的实际移动;基于指示所述改变的相对位置和/或取向的所述附加数据信号(52)来确定所述气体涡轮(12)、所述负载(14)或两者的附加目标移动;以及基于所述气体涡轮、所述负载(14)或两者的所述附加目标移动和所述实际移动来确定所述调节垫(90)、所述液压缸(92)或两者的附加的至少一个控制命令(82)。10.根据权利要求1所述的气体涡轮系统(10),所述气体涡轮系统包括:所述调节垫(90),其中所述调节垫(90)被配置为被控制来引起所述对准组件(24)所联接的所述气体涡轮(12)或所述负载(14)中的一者的横向移动;和所述液压缸(92),其中所述液压缸(92)被配置为被控制来引起所述对准组件(24)所联接的所述气体涡轮(12)或所述负载(14)中的一者的竖直移动。11.根据权利要求1所述的气体涡轮系统(10),所述气体涡轮系统包括:所述调节垫(90),其中所述调节垫(90)被配置为被控制来引起所述气体涡轮(12)的移动;和附加调节垫(90),所述附加调节垫被配置为被控制来引起所述负载(14)的移动,所述附加调节垫(90)联接到所述负载(14)。12.一种用于对准气体涡轮系统(10)的方法(200),所述方法包括:从激光对准组件(24)接收(202)数据信号(52),所述数据信号指示所述气体涡轮系统(10)的气体涡轮(12)与所述气体涡轮系统(10)的负载(14)之间的相对位置和/或取向;经由控制器(72)基于指示所述相对位置和/或取向的所述数据信号(52)来确定(204)所述气体涡轮(12)、所述负载(14)或两者的目标移动;基于所述目标移动并经由所述控制器(72)来确定(206)对准组件(24)的调节垫(90)、液压缸(92)或两者的至少一个控制命令(82),所述对准组件(24)联接到所述气体涡轮(12)或所述负载(14);以及经由所述控制器(72)通过所述至少一个控制命令(82)来控制(208)所述调节垫(90)、所述液压缸(92)或两者的移动。13.根据权利要求12所述的方法(200),所述方法包括经由所述激光对准组件(24)的激光发射器(40)和所述激光对准组件(24)的激光接收器(42)来确定所述气体涡轮系统(10)的所述气体涡轮(12)与所述气体涡轮系统(10)的所述负载(14)之间的所述相对位置和/或取向。14.根据权利要求12所述的方法(200),所述方法包括:
接收(209)附加数据信号(52),所述附加数据信号指示所述气体涡轮系统(10)的所述气体涡轮(12)与所述气体涡轮系统(10)的所述负载(14)之间的改变的相对位置和/或取向;基于指示所述改变的相对位置和/或取向的所述附加数据信号(52)来确定(210)所述气体涡轮(12)、所述负载(14)或两者的实际移动;基于指示所述改变的相对位置和/或取向的所述附加数据信号(52)来确定(204)所述气体涡轮(12)、所述负载(14)或两者的附加目标移动;以及基于以下项来确定(206)所述调节垫(90)、所述液压缸(82)或两者的附加的至少一个控制命令(82):所述附加目标移动;和所述实际移动或所述实际移动与所述目标移动之间的差异。15.根据权利要求12所述的方法(200),所述方法包括:将所述激光对准组件(24)的激光对准发射器(40)定位在所述气体涡轮(12)的气体涡轮轴(18)或所述负载(14)的负载轴(20)中的一者上;以及将所述激光对准组件(24)的激光对准接收器(42)定位在所述气体涡轮轴(18)或所述负载轴(20)中的另一者上。
技术总结
本发明提供了一种气体涡轮系统(10),包括存储指令的存储器(74)和处理器(76),该处理器被配置为执行指令以使得处理器(76)执行各种功能。功能包括:接收数据信号(52),该数据信号指示气体涡轮系统(10)的气体涡轮(12)与气体涡轮系统(10)的负载(14)之间的相对位置和/或取向;以及基于指示相对位置和/或取向的数据信号(52)来确定气体涡轮(12)、负载(14)或两者的目标移动。功能还包括基于目标移动来确定对准组件(24)的调节垫(90)、液压缸(92)或两者的至少一个控制命令(82),对准组件(24)联接到气体涡轮(12)或负载(14)。功能还包括通过至少一个控制命令(82)来控制调节垫(90)、液压缸(92)或两者的移动。或两者的移动。或两者的移动。
技术研发人员:T
受保护的技术使用者:通用电气公司
技术研发日:2021.08.20
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。