技术特征:
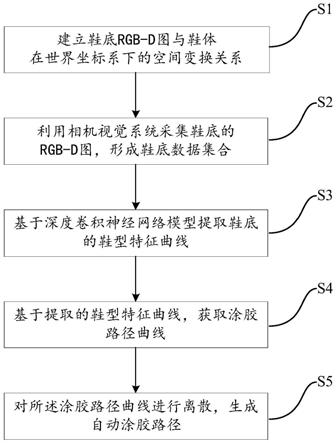
1.基于鞋型特征曲线提取的鞋底自动涂胶方法,其特征在于,包括以下步骤:s1:标定相机视觉系统,基于所述相机视觉系统建立鞋底rgb-d图与鞋体在世界坐标系下的空间变换关系;s2:利用所述相机视觉系统采集鞋底的rgb-d图,并对鞋底数据进行扩增形成鞋底数据集合;s3:根据所述鞋底数据集合,并结合深度卷积神经网络模型提取所述鞋底的特征曲线;s4:基于提取的鞋型特征曲线,获取涂胶路径曲线;s5:对所述涂胶路径曲线进行离散,拾取自动涂胶路径点,生成自动涂胶路径。2.根据权利要求1所述的基于鞋型特征曲线提取的鞋底自动涂胶方法,其特征在于,所述步骤s1中的相机视觉系统采用结构光视觉测量系统,所述相机视觉系统包括被测量的鞋体、相机和激光器,步骤s1得到被测量的鞋体、相机和激光器之间的空间变换关系的具体步骤包括:s101:获取多组鞋体在世界坐标系中的三维坐标以及在像素坐标系中的像素坐标,对相机视觉系统进行标定,获得相机的内参数和外参数;s102:对激光器产生的激光平面进行标定,确定成像平面上特征点的空间坐标,得到鞋体、相机和激光器之间的空间变换关系。3.根据权利要求2所述的基于鞋型特征曲线提取的鞋底自动涂胶方法,其特征在于,所述步骤s102中采用立体标靶方法对所述激光平面进行标定,其具体方法为:将所述立体标靶的八个顶点作为参考点,拟合出激光平面方程;获取相机成像平面上多个特征点的坐标,并结合所述激光平面方程,得到激光平面在相机坐标系下的三坐标轴参数;获取由所述激光平面投射在成像平面上形成的激光条纹上的激光条纹点在成像平面上的坐标,结合所述激光平面方程以及激光条纹点的坐标,得到该激光条纹点在相机坐标系下的坐标,进而得到鞋体、相机和激光器之间的空间转换关系。4.根据权利要求3所述的基于鞋型特征曲线提取的鞋底自动涂胶方法,其特征在于,在步骤s101中,所述相机的内参数和外参数由如下公式计算得到:其中:(x
w
,y
w
,z
w
)为被测量鞋体在世界坐标系中的三维坐标,(u,v)为被测量鞋体在像素坐标系中的坐标;为相机的外参数矩阵;在步骤s102中,所述激光条纹点对应的空间点在相机坐标系下的坐标可表示为:其中:(x
c
,y
c
,z
c
)为激光条纹点对应的空间点在相机坐标系下的坐标(也即激光平面上的点在相机坐标系下的三坐标轴上的坐标);(x
i
,y
i
,z
i
)为激光条纹上的激光条纹点p
i
在相
机成像平面(也即相机视觉系统的归一化成像面)上的坐标。5.根据权利要求1所述的基于鞋型特征曲线提取的鞋底自动涂胶方法,其特征在于,所述步骤s2获得鞋底数据集合的具体方法为:利用标定完成后的相机视觉系统采集不同鞋底的rgb-d图,并对每一rgb-d图中鞋底的鞋型特征曲线进行标注,得到含有若干标注了鞋型特征曲线的rgb-d图样本库;采用滑动窗口算法对所述rgb-d图样本库中的每一样本进行滑动采样,以对鞋底数据进行扩增,得到鞋底数据集合。6.根据权利要求1所述的基于鞋型特征曲线提取的鞋底自动涂胶方法,其特征在于,在步骤s3中,采用基于segnet网络的深度卷积神经网络模型进行鞋型特征曲线的提取,其具体步骤为:s301:将所述鞋底数据集合划分为训练集和测试集;s302:将训练集输入所述深度卷积神经网络模型,对鞋型特征曲线进行识别,并将识别出的鞋型特征曲线反向传递至深度卷积神经网络模型中进行模型训练;s303:将测试集输入训练好的深度卷积神经网络模型中,测试所述深度卷积神经网络模型的提取精度,实现鞋型特征曲线的提取。7.根据权利要求5所述的基于鞋型特征曲线提取的鞋底自动涂胶方法,其特征在于,所述基于segnet网络的深度卷积神经网络模型的网络结构包含呈对称结构的编码器和解码器,所述编码器具有4层上采样层,所述解码器具有4层下采样层;且所述网络结构的左侧采用vgg-16的前10层卷积网络用于提取特征并保存池化编号,所述网络结构的右侧采用反卷积与去采样过程重现图像特征。8.根据权利要求6所述的基于鞋型特征曲线提取的鞋底自动涂胶方法,其特征在于,所述深度卷积神经网络模型在激活层的每一卷积层上还包括有一批标准化层,且在最后一卷积层上具有softmax层,以计算鞋底rgb-d图中每一像素在所有类别中的最大概率,完成像素级别分类,进而提取鞋型特征曲线。9.根据权利要求1所述的基于鞋型特征曲线提取的鞋底自动涂胶方法,其特征在于,所述步骤s4获取涂胶路径曲线的具体方法为:设置涂胶间距,并以所述涂胶间距为基准拾取所述特征曲线的左、右两侧相对位置的点对,从而获取每对点对之间的连线形成所述涂胶路径曲线。10.根据权利要求1所述的基于鞋型特征曲线提取的鞋底自动涂胶方法,其特征在于,所述步骤s5生成自动涂胶路径的具体方法为:分别计算每一涂胶路径曲线的总体曲率值,并设定曲率误差阈值;沿鞋底长度方向依次对每一涂胶路径曲线按照其曲线的总体曲率值进行离散,得到若干路径点;对于每一涂胶路径曲线,以该涂胶路径曲线的起始路径点开始迭代计算每一路径点的曲率值,并判断该路径点的曲率值与总体曲率值的误差是否在曲率误差范围内,若不在,则该点为非拾取点,若在,则该点为拾取点,将所述拾取点依次存入路径点集合,并对拾取点进行编号生成自动涂胶路径。
技术总结
本发明公开了一种基于鞋型特征曲线提取的鞋底自动涂胶方法,包括标定相机视觉系统,基于所述相机视觉系统建立鞋底RGB-D图与鞋体在世界坐标系下的空间变换关系;利用所述相机视觉系统采集鞋底的RGB-D图,并对鞋底数据进行扩增形成鞋底数据集合;根据所述鞋底数据集合,并结合深度卷积神经网络模型提取所述鞋底的特征曲线;基于提取的鞋型特征曲线,获取涂胶路径曲线;对所述涂胶路径曲线进行离散,拾取自动涂胶路径点,生成自动涂胶路径,能够有效提高鞋底涂胶的加工精度和效率,降低了工人职业危害的风险。职业危害的风险。职业危害的风险。
技术研发人员:叶少文 孔小芳
受保护的技术使用者:湖北忠和冶金机械制造股份有限公司
技术研发日:2021.10.11
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。