1.本发明涉及一种清洁机器人的定位方法清洁机器人及采用该方法的清洁机器人。
背景技术:
2.清洁机器人在清扫过程中,为了达到更高的覆盖率,更高效的完成路径规划和导航任务,需要有更高的定位精度。然而由于房间中障碍物较多,定位和建图都存在一定误差,很多清洁机器人通过在中心安装摄像头对天花板进行垂直拍摄的方式,对机器人进行定位。如专利号为zl201410149081.1的中国专利《基于天花板图像信息的机器人定位与地图构建系统》,以及申请号为cn201610725330.6的中国专利申请《基于天花板的室内移动机器人视觉定位方法》,均通过在清洁机器人上设置能拍摄天花板照片的摄像头,通过不断比对两张天花板照片中的特征直线和特征点,将比对结果转化成移动机器人在世界坐标系中的运动旋转角和运动位移增量,以此实现移动机器人的自我定位。通过以天花板作为参考目标,相比于其他物体,天花板不易被遮挡且照片里的元素较为单调,便于图像处理单元提取轮廓,分析照片。
3.然而,天花板上的特殊标记较少,采用上述方法进行特征提取和匹配,经常会出现由于特征相近导致匹配错误,影响定位精度;另外,通过对比两帧图像的特征点来计算自身位置,特征提取匹配以及计算过程都存在一定误差,随着清洁机器人的运动,定位误差会不断累积,从而导致导航以及建图误差增大,因此现有技术有待于进一步改进。
技术实现要素:
4.本发明所要解决的首要技术问题是针对上述现有技术提供一种误差小定位精确的清洁机器人的定位方法。
5.本发明进一步要解决的技术问题是提供一种具有误差小定位精确的清洁机器人。
6.本发明解决上述首要技术问题所采用的技术方案为:一种清洁机器人的定位方法,其特征在于包括如下步骤:
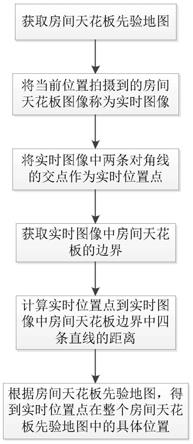
7.步骤1、获取房间天花板先验地图,具体方法为:
8.采用设置在清洁机器人上的摄像头拍摄房间天花板图像,提取房间天花板图像中灰度值与周边灰度值明显不同的点作为标识点,采用拟合方法将这些提取出的标识点拟合成四条直线,从而得到整个房间天花板的边界,进而得到房间天花板先验地图;
9.步骤2、清洁机器人在实际清扫过程中,通过当前位置拍摄到的房间天花板图像,获取当前位置在房间天花板先验地图中的位置,具体包括:
10.步骤2-1、将当前位置拍摄到的房间天花板图像称为实时图像,将实时图像中两条对角线的交点作为此时清洁机器人在实时图像中的位置,将该位置点标记为实时位置点;
11.步骤2-2、提取实时图像中天花板的灰度值与周边灰度值明显不同的点作为标识点,采用拟合方法将这些提取出的标识点拟合成直线,将拟合成的直线与房间天花板先验地图的边界进行匹配,从而获取实时图像中房间天花板的边界;
12.步骤2-3、计算实时位置点到实时图像中房间天花板边界中四条直线的距离,然后根据房间天花板先验地图,得到实时位置点在整个房间天花板先验地图中的具体位置。
13.作为改进,所述步骤1中,清洁机器人采用自主探索的方式,在待清洁房间内一定范围内移动,获取整个房间内完整天花板的特征信息,从而得到房间天花板先验地图。
14.再改进,所述步骤1中,提取房间天花板图像中的标识点时采用的提取方法包括但不限于fast特征检测方法、surf特征检测方法、sift特征提取方法、线特征提取方法。
15.再改进,所述步骤1中,得到房间天花板的先验地图后,得到整个房间的长宽信息。
16.本发明解决上述进一步技术问题所采用的技术方案为:一种清洁机器人,包括机体,机体的顶部设有摄像头,机体上设有行走机构,其特征在于:所述机体内设有与行走机构及摄像头电连接的控制器,所述控制器采用上述定位方法对清洁机器人进行定位。
17.与现有技术相比,本发明的优点在于:
18.1、可以提高清洁机器人定位精度,减少由于计算定位点产生的误差;
19.2、可以减少清洁一段时间后产生的累计定位误差;
20.3、可以减少图像匹配带来的误差。
附图说明
21.图1为本发明实施例中清洁机器人的定位方法流程图。
22.图2为清洁机器人拍摄的某一张实时图像获取实时位置点的方法图。
23.图3为清洁机器人拍摄的某一张实时图像拟合边界直线的示意图。
24.图4为清洁机器人拍摄的某一张实时图像拟合边界直线形成天花板边界的示意图。
25.图5为清洁机器人拍摄的某一张实时图像中实时位置点与天花板边界的距离计算方式示意图。
具体实施方式
26.以下结合附图实施例对本发明做详细描述。
27.如图1所示,本发明提供了一种清洁机器人的定位方法,其特征在于包括如下步骤:
28.步骤1、获取房间天花板先验地图,具体方法为:
29.清洁机器人采用自主探索的方式,在待清洁房间内一定范围内移动,并利用设置在清洁机器人顶部的广角摄像头或360
°
鱼眼摄像头拍摄房间天花板图像,采用fast特征检测方法或surf特征检测方法或sift特征提取方法或线特征提取方法,提取房间天花板图像中灰度值与周边灰度值明显不同的点作为标识点,然而采用拟合方法将这些提取出的标识点拟合成四条直线,从而得到整个房间天花板的边界,进而得到房间天花板先验地图,并获取房间天花板中四条边界直接的长宽信息;
30.步骤2、清洁机器人在实际清扫过程中,通过当前位置拍摄到的房间天花板图像,然后获取当前位置在房间天花板先验地图中的位置,具体包括:
31.步骤2-1、将当前位置拍摄到的房间天花板图像称为实时图像,将实时图像中两条对角线的交点作为此时清洁机器人在实时图像中的位置,将该位置点标记为实时位置点;
以清洁机器人拍摄的某一张实时图像为例,利用对角线的交点作为实时位置点,参见图2所示;
32.步骤2-2、采用fast特征检测方法或surf特征检测方法或sift特征提取方法或线特征提取方法,提取实时图像中天花板的灰度值与周边灰度值明显不同的点作为标识点,采用拟合方法将这些提取出的标识点拟合成直线;同样以清洁机器人拍摄的某一张实时图像为例,拟合后的直线参见图3所示;如果拟合成的直线不能形成完整的长方形或正方形,则通过在现有直线基础上,画虚拟延长线的方法,获取一个完整的长方形或正方形,参见图4所示,然后根据房间的长宽信息,将拟合成的边界直线与房间天花板先验地图中房间的长短信息进行匹配,从而获取实时图像中房间天花板的边界;
33.步骤2-3、最后计算实时位置点到实时图像中房间天花板边界中四条直线的距离,参见图5所示,然后根据房间天花板先验地图,得到实时位置点在整个房间天花板先验地图中的具体位置。
34.本发明还提供了一种清洁机器人,包括机体,机体的顶部设有摄像头,机体上设有行走机构,机体内设有与行走机构及摄像头电连接的控制器,所述控制器采用上述定位方法对清洁机器人进行定位。
技术特征:
1.一种清洁机器人的定位方法,其特征在于包括如下步骤:步骤1、获取房间天花板先验地图,具体方法为:采用设置在清洁机器人上的摄像头拍摄房间天花板图像,提取房间天花板图像中灰度值与周边灰度值明显不同的点作为标识点,采用拟合方法将这些提取出的标识点拟合成四条直线,从而得到整个房间天花板的边界,进而得到房间天花板先验地图;步骤2、清洁机器人在实际清扫过程中,通过当前位置拍摄到的房间天花板图像,获取当前位置在房间天花板先验地图中的位置,具体包括:步骤2-1、将当前位置拍摄到的房间天花板图像称为实时图像,将实时图像中两条对角线的交点作为此时清洁机器人在实时图像中的位置,将该位置点标记为实时位置点;步骤2-2、提取实时图像中天花板的灰度值与周边灰度值明显不同的点作为标识点,采用拟合方法将这些提取出的标识点拟合成直线,将拟合成的直线与房间天花板先验地图的边界进行匹配,从而获取实时图像中房间天花板的边界;步骤2-3、计算实时位置点到实时图像中房间天花板边界中四条直线的距离,然后根据房间天花板先验地图,得到实时位置点在整个房间天花板先验地图中的具体位置。2.根据权利要求1所示的清洁机器人的定位方法,其特征在于:所述步骤1中,清洁机器人采用自主探索的方式,在待清洁房间内一定范围内移动,获取整个房间内完整天花板的特征信息,从而得到房间天花板先验地图。3.根据权利要求1所述的清洁机器人的定位方法,其特征在于:所述步骤1中,提取房间天花板图像中的标识点时采用的提取方法包括但不限于fast特征检测方法、surf特征检测方法、sift特征提取方法、线特征提取方法。4.根据权利要求1所述的清洁机器人的定位方法,其特征在于:所述步骤1中,得到房间天花板的先验地图后,得到整个房间的长宽信息;所述步骤2-2中,根据房间的长宽信息,将拟合成的直线与房间天花板先验地图中房间的长短信息进行匹配,从而获取实时图像中房间天花板的边界。5.一种清洁机器人,包括机体,机体的顶部设有摄像头,机体上设有行走机构,其特征在于:所述机体内设有与行走机构及摄像头电连接的控制器,所述控制器采用如权利要求1所述定位方法对清洁机器人进行定位。
技术总结
本发明涉及一种清洁机器人的定位方法,其特征在于包括如下步骤:步骤1、获取房间天花板先验地图;步骤2、清洁机器人在实际清扫过程中,通过当前位置拍摄到的房间天花板图像,获取当前位置在房间天花板先验地图中的位置:将当前位置拍摄到的房间天花板图像称为实时图像,将实时图像中两条对角线的交点作为实时位置点,获取实时图像中房间天花板的边界,计算实时位置点到实时图像中房间天花板边界中四条直线的距离,然后根据房间天花板先验地图,得到实时位置点在整个房间天花板先验地图中的具体位置。与现有技术相比,本发明的优点在于:可以提高清洁机器人定位精度,减少由于计算定位点产生的误差。算定位点产生的误差。算定位点产生的误差。
技术研发人员:贾智博
受保护的技术使用者:宁波方太厨具有限公司
技术研发日:2020.08.26
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。