1.本发明涉及水下声纹特征提取技术领域,具体为基于多尺度的环境特征提取方法。
背景技术:
2.蔚蓝的海洋蕴藏着丰富的资源,在军事上也具有重大的战略意义。资源危机使得开发、利用海洋资源更为迫切。科技进步使人们对海洋的研究得以日益深入,也深刻影响和改变着人类的海洋价值观。海洋对于人类生存和发展的重大意义受到了各国政府的普遍重视。各国政府纷纷投入大量人力、物力来研究海洋,力争使自己能够最大限度地从海洋中获得利益。
3.要想充分开发利用海洋,我们必须要认识、了解海洋,这就要我们准确掌握海洋环境信息。众所周知,声波是水中目前所知最有效的传播形式,这也是为什么现阶段一般都是采用海洋声学来研究海洋特性、获取海洋信息的原因。海水的温度、盐度、海面起伏、海底深度、海底底质结构等都影响着水下声传播,复杂多变的海洋环境使得声波在海洋信道中的传播更加复杂、更加难以预测。水声中通常将海底对声场产生巨大作用的海域称为浅海,由于海底的影响,多途与频散效应严重,浅海声学比深海声学更为复杂。海底底质的声学特性:海底的密度、声速、衰减等参数对浅海声传播有着重要的影响,这些因素都影响声场的准确预报、声的作用距离估算及声源的定位精度等。由此,获取海洋环境信息对开发和利用海洋的前提准备、具有重要的意义。
4.海洋环境信息也可以通过直接测量方法获得。但由于海洋环境随时间和空间常常会发生比较明显的变化,在一定时期测量的信息可能对以后应用时的意义不大,并且对海底直接逐点测量往往比较费时费力,面一些海底的声学特性也不容易通过直接测量就能获得,因此通过直接测量来获得海洋环境信息不是一个有效的方法。
技术实现要素:
5.本发明的目的是:针对现有技术中模型特征提取准确率低的问题,提出基于多尺度的环境特征提取方法。
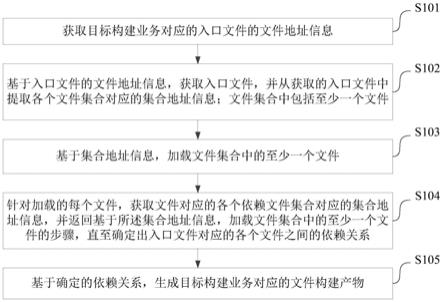
6.本发明为了解决上述技术问题采取的技术方案是:基于多尺度的环境特征提取方法,包括以下步骤:
7.步骤一:采集水声信号数据,并将水声信号数据的特征进行标记,之后利用标记后的水声信号数据构成数据集;
8.步骤二:对数据集进行预处理,并将预处理后的数据集作为训练集;
9.步骤三:利用训练集训练多尺度的环境特征提取网络模型;
10.步骤四:利用训练好的多尺度的环境特征提取网络模型对水域环境的水声信号进行特征提取。
11.进一步的,所述步骤一中采集水声信号数据的具体步骤为:
12.在一端水下放置发射换能器发射高频信号,在间隔75米距离的另一端放置多个水听器接收发射端发射的高频信号,发射信号与每个水听器接收的信号构成一组水声信号数据。
13.进一步的,所述步骤二中对数据集进行预处理的具体步骤为:
14.对数据进行分帧加窗,划分为信号片段,并采用窗口函数对信号片进行处理。
15.进一步的,所述窗口函数为海宁窗,海宁窗表示为:
[0016][0017]
其中,w为采用的加窗函数,n为每一帧的每一个具体数据,n为分帧后的数据长度。
[0018]
进一步的,所述信号片段划分以0.2秒为帧长,0.1秒为帧移进行划分。
[0019]
进一步的,所述步骤三中利用训练集训练多尺度的环境特征提取网络模型的具体步骤为:
[0020]
首先从训练集中随机抽取出多个信号片段,然后将抽取的多个信号片段输入多尺度的环境特征提取网络模型中得到输出的特征,然后将输出的特征和特征标签进行损失计算,最后将损失计算结果进行反向传播,优化模型。
[0021]
进一步的,所述损失计算通过softmax回归器进行。
[0022]
进一步的,所述多尺度的环境特征提取网络模型包括八个并行的卷积网络,八个并行的卷积网络的卷积核大小分别为3、5、7、9、30、50、70和90,
[0023]
预处理后的数据输入八个并行的卷积网络,并将八个并行的卷积网络提取到的特征组合成多尺度特征,然后将组合成的多尺度特征输入改进的基于一维卷积的残差网络,所述改进的基于一维卷积的残差网络包括六个残差块,残差块的通道分别为8、16、32,64、 128和256,每一个残差块都会将上一层输入数据的通道进行倍增,同时长度减半,经过改进的基于一维卷积的残差网络的组合成的多尺度特征最终经过全局均值池化和全连接层后得到提取特征。
[0024]
进一步的,所述多尺度的环境特征提取网络模型表示为:
[0025]
x=[conv(x)forconvinconvs]
[0026]
式中,x代表输入的水声信号数据,x代表不同尺度上的特征组合,convs代表多个不同尺度的卷积网络组成的多尺度网络模块。
[0027]
本发明的有益效果是:
[0028]
本技术在数据采集过程中,因为接受信号的船随水流有移动,所以数据前后会有一定的差异,导致数据的前后不均衡,针对这一点,本技术设计了不同的数据切分方式,并做了实验进行研究。分别对数据采取四种切分方式,这些方式又可分为两类,一类是整体切分为7:3和5:5;另一类是先将数据按照1秒来作为一个局部数据,然后每一个局部数据内在采取7:3和5:5的切分方式。本技术使用局部切这样更加均衡的切分方式,提高了模型特征提取的准确率。
附图说明
[0029]
图1为本技术的流程图;
[0030]
图2为不同卷积核组合方式结果对比图;
[0031]
图3为不同切分方式结果对比图;
[0032]
图4为不同卷积核组合方式结果对比图;
[0033]
图5为不同卷积核组合方式结果细节对比图;
[0034]
图6为本技术多尺度的环境特征提取网络模型结构图;
[0035]
图7为本技术采集水声信号数据示意图;
[0036]
图8为本技术分帧加窗,划分为信号片段示意图;
[0037]
图9为窗口函数处理后示意图1;
[0038]
图10为窗口函数处理后示意图2;
[0039]
图11为窗口函数处理后示意图3。
具体实施方式
[0040]
需要特别说明的是,在不冲突的情况下,本技术公开的各个实施方式之间可以相互组合。
[0041]
具体实施方式一:参照图1具体说明本实施方式,本实施方式所述的基于多尺度的环境特征提取方法,包括以下步骤:
[0042]
步骤一:采集水声信号数据,并将水声信号数据的特征进行标记,之后利用标记后的水声信号数据构成数据集;
[0043]
步骤二:对数据集进行预处理,并将预处理后的数据集作为训练集;
[0044]
步骤三:利用训练集训练多尺度的环境特征提取网络模型;
[0045]
步骤四:利用训练好的多尺度的环境特征提取网络模型对水域环境的水声信号进行特征提取。
[0046]
近年来,人们尝试利用声学方法来反演海洋环境参数并且取得了很大的进步。所谓海洋环境参数反演通常就是在海水中布放水听器或者水听器阵对要反演的海域进行声场观测,然后对水听器接收到的声信号进行分析处理来估计我们感兴趣的海洋环境参数。用水声学的方法来反演海洋环境参数是一个比较方便、高效的途径,因为这种方法一般只需要靠放一个或几个发射声源和接收声基阵就可以同时反演出大范围的海洋环境参数,并且可以对海洋环境长时间连续监测,与那些逐点测量海洋环境参数的方法相比,优势不言而喻。更加值得一提的是,反演的数据可以提供海洋环境在空间综合与时间平均意义上的估计,这是用传统直接测量的方法所难以获得的优点。海洋环境反演的一般结构图如图1所示,本技术准备对表中的地声参数获取技术进行研究。
[0047]
具体实施方式二:本实施方式是对具体实施方式一的进一步说明,本实施方式与具体实施方式一的区别是所述水声信号数据包括发射端信号数据和接收端信号数据。
[0048]
具体实施方式三:本实施方式是对具体实施方式二的进一步说明,本实施方式与具体实施方式二的区别是所述步骤一中采集水声信号数据的具体步骤为:
[0049]
在一端水下放置发射换能器发射高频信号,在间隔75米距离的另一端放置多个水听器接收发射端发射的高频信号,发射信号与每个水听器接收的信号构成一组水声信号数据。
[0050]
具体实施方式四:本实施方式是对具体实施方式三的进一步说明,本实施方式与
具体实施方式三的区别是所述步骤二中对数据集进行预处理的具体步骤为:
[0051]
对数据进行分帧加窗,划分为信号片段,并采用窗口函数对信号片进行处理。
[0052]
具体实施方式五:本实施方式是对具体实施方式四的进一步说明,本实施方式与具体实施方式四的区别是所述窗口函数为海宁窗,海宁窗表示为:
[0053][0054]
其中,w为采用的加窗函数,n为每一帧的每一个具体数据,n为分帧后的数据长度。
[0055]
具体实施方式六:本实施方式是对具体实施方式五的进一步说明,本实施方式与具体实施方式五的区别是所述信号片段划分以0.2秒为帧长,0.1秒为帧移进行划分。
[0056]
具体实施方式七:本实施方式是对具体实施方式六的进一步说明,本实施方式与具体实施方式六的区别是所述步骤三中利用训练集训练多尺度的环境特征提取网络模型的具体步骤为:
[0057]
首先从训练集中随机抽取出多个信号片段,然后将抽取的多个信号片段输入多尺度的环境特征提取网络模型中得到输出的特征,然后将输出的特征和特征标签进行损失计算,最后将损失计算结果进行反向传播,优化模型。
[0058]
具体实施方式八:本实施方式是对具体实施方式七的进一步说明,本实施方式与具体实施方式七的区别是所述损失计算通过softmax回归器进行。
[0059]
具体实施方式九:本实施方式是对具体实施方式八的进一步说明,本实施方式与具体实施方式八的区别是所述多尺度的环境特征提取网络模型包括八个并行的卷积网络,八个并行的卷积网络的卷积核大小分别为3、5、7、9、30、50、70和90,
[0060]
预处理后的数据输入八个并行的卷积网络(在计算上,是将输入的x,依次通过八个卷积核不同的卷积网络,得到x1到x8,然后将x1和x8,在通道维度进行cat拼接,得到多尺度特征),并将八个并行的卷积网络提取到的特征组合成多尺度特征,然后将组合成的多尺度特征输入改进的基于一维卷积的残差网络,所述改进的基于一维卷积的残差网络包括六个残差块,残差块的通道分别为8、16、32,64、128和256,每一个残差块都会将上一层输入数据的通道进行倍增,同时长度减半,经过改进的基于一维卷积的残差网络的组合成的多尺度特征最终经过全局均值池化和全连接层后得到提取特征。将多尺度模型提取的特征,通过softmax回归器来和目标进行损失计算的,进而反向传播,训练优化模型。
[0061]
具体实施方式十:本实施方式是对具体实施方式九的进一步说明,本实施方式与具体实施方式九的区别是所述多尺度的环境特征提取网络模型表示为:
[0062]
x=[conv(x)forconvinconvs]
[0063]
式中,x代表输入的水声信号数据,x代表不同尺度上的特征组合,convs代表多个不同尺度的卷积网络组成的多尺度网络模块。
[0064]
在数据预处理部分,根据信号的发射周期,指定切片的长度和步长,并对水声信号进行切片和加窗处理。之后将切片加窗的发射端信号和输入端信号拼接在一起,输入给基于多尺度的环境特征提取网络模型。多尺度的环境特征模型,由多尺度特征提取底层网络和一维残差网络的后续处理层构成。可以实现在对不同环境下录制的水声进行学习训练以后,进行高精度的提取分类。
[0065]
所提出的发明方法流程如图1所示,其中位于核心位置的就是对输入的发射端信号和水听器接收信号,进行特征提取的基于多尺度网络的环境特征提取网络,通过这个网络模型,可以提取出发射端信号和水听器接收信号所在的环境特征,从而为后续的水下试验环境的反演,提供有效的环境特征信息的支持。
[0066]
相对于传统的卷积网络,基于多尺度网络的环境特征提取网络模型可以通过灵活的设计多尺度网络的形式,从而更有效的提取输入数据的特征,避免了传统的卷积网络在采样率过高的一维声信号数据上,底层特征提取网络提取特征效果不好的问题。改进的基于一维卷积的残差网络,可以在加深网络层增强拟合能力的同时,避免梯度消失和梯度爆炸问题,让模型可以更稳定的进行训练。
[0067]
多尺度网络的环境特征提取网络模型可以针对输入数据的特性,进行灵活的扩展变动,选择的卷积核大小不同,会提取输入数据在不同的尺度上的特征。这在面对本任务中高采样率的高频水声信号时,可以有效提取水声信号的特征。
[0068]
多尺度网络的环境特征提取网络模型的多尺度网络模块是由多个不同尺度的卷积网络层组成的,多尺度网络模块可以由下述公式表示:
[0069]
x=[conv(x)for conv in convs]
[0070]
式中,x代表输入的水声信号数据,x代表不同尺度上的特征组合,convs代表多个不同尺度的卷积网络组成的多尺度网络模块,多尺度网络模块提取输入的水声信号特征的过程,就是迭代多尺度网络模块中的每一个卷积网络,然后将得到的每一个卷积网络的输出结果拼接在一起,并输入给后面的残差网络模块。
[0071]
图3-图5是使用不同的多尺度卷积核的效果,其中的卷积核的构造方式为:1)不使用多尺度卷积网络;2)多尺度卷积网络设计方式为3、5、7、9;3)多尺度卷积网路设计方式为3,5,7,9,11,13,15,17;4)多尺度卷积网络设计方式为3,5,7,9,30,50, 70,90;5)多尺度卷积网络设计方式为3,5,7,9,11,13,15,17,30,50,70,90。
[0072]
可以看出,随着多尺度卷积网络模型的多尺度卷积核增加,模型的识别效果会有明显的提升。
[0073]
在数据采集过程中,因为接受信号的船随水流有移动,所以数据前前后会有一定的差异,导致数据的前后不均衡,针对这一点,笔者设计了不同的数据切分方式,并做了实验进行研究。分别对数据采取四种切分方式,这些方式又可分为两类,一类是整体切分为7:3 和5:5;另一类是先将数据按照1秒来作为一个局部数据,然后每一个局部数据内在采取 7:3和5:5的切分方式。如下图所示,可以明显看到,相较于局部切的方式,整体划分数据集,由于数据集的不均衡,测试集上的震荡现象非常严重。而使用局部切这样更加均衡的切分方式,模型会有更好的表现结果。
[0074]
整个网络结构由两部分构成:
[0075]
多尺度特征提取网络:多尺度网络模块是由多个不同尺度的卷积网络层组成的,该模块可以针对输入数据的特性,进行灵活的扩展变动,选择的卷积核大小不同,会提取输入数据在不同的尺度上的特征。这在面对高采样率的高频水声信号时,可以有效提取水声信号的特征。
[0076]
一维残差网络:针对一维水声信号改进的残差网络,可以有效的对水声信号的高维特征进行组合提取,并最终的到准确的环境特征类别。
[0077]
残差网络为六个残差块,输入的数据,每经过一个残差块,通道都会加倍,长度都会减半。
[0078]
对不同环境水域的水声信号数据进行采集,包括发射端信号和接收端信号,以及该水域的特征标签。具体过程为:在一端水下放置发射换能器,发射高频信号。在间隔一定距离的另一端,放置多个水听器,接受发射端发射的信号。这样的一组发射端发射的信号和接收端接收的信号,以及该水域的特征标签,就构成了在该水域采集的数据。
[0079]
对数据集进行相关预处理,预处理过程包括剔除无效错误的数据,填补或者删除空缺数据,然后对处理过的数据,进行加窗分帧,划分为一个个信号片段,在按照一定的比例划分为训练集、测试集和验证集。其中,训练集、测试集、验证集,都是加窗分帧后的发射端信号和接收端信号构成的信号片段。
[0080]
设定多个不同的多尺度参数的多尺度的环境特征提取网络模型。
[0081]
将训练集数据输入到模型进行训练,具体流程为:每次从训练集中,随机取出多个信号片段,然后输入给模型,得到模型的输出,然后将模型的输出和特征标签进行损失计算,再反向传播优化模型,让模型的预测更加符合标注的该水域的特征标签。
[0082]
训练得到的模型,在测试集进行测试,并重复3,直到得到一个在测试集比较理想的多尺度的环境特征提取网络模型。
[0083]
测试得到的多尺度的环境特征提取网络模型在验证集上的指标,并作为模型的预定指标。
[0084]
对新的目标的水域环境的水声信号进行预测。
[0085]
实际采集的过程中,测量船和母船间隔一定的距离y,比如70m,然后在发射端有发射换能器,在测量船有用来接收的多个水听器,发射端的发射换能器放置在距离水面深度 x处,比如3m。发射换能器会发射循环的高频信号,水听器接收发射端发射的信号。高频信号在水中,到达水听器经过的路径不同,到达的时间也不同。这样发射端的数据和接收端的数据的波形信号在相位上就产生了差异,同时在接收端,多个水听器之间,也因为到达的时间产生了相位差异,这个差异,就包含了水体的环境信息,借助提出的模型,就可以从这个包含水体环境信息的差异中,对环境进行识别。如图7所示。
[0086]
采集的发射端的波形声信号数据和水听器接收端的波形声信号数据,其中发射端的数据是一段循环的高频信号,采集的水听器接收端的数据,是一段较长的波形信号,模型无法直接进行处理,需要先进行切分成帧片段,然后再输入给模型进行处理。模型将每一个帧片段,采用窗口函数进行处理,再输入给多尺度网络。在多尺度网络中,输入的数据,会并行输入给多个不同尺度卷积核的卷积网络,然后再在通道维度拼接在一起,组合成多尺度特征。之后就将多尺度特征输入给一维残差网络进行处理,处理之后的网络,会通过均值池化,进过一个全连接层就可以进行分类,识别波形声信号经过的水域属于什么水域。其中,切分的过程,以0.2秒为帧长,0.1秒为帧移,将接收端的声信号进行切分。
[0087]
窗函数处理之后,数据帧会更加平滑,其效果如图9-图11,其中,多尺度网络采用的卷积核为3、5、7、9、30、50、70、90。
[0088]
需要注意的是,具体实施方式仅仅是对本发明技术方案的解释和说明,不能以此限定权利保护范围。凡根据本发明权利要求书和说明书所做的仅仅是局部改变的,仍应落入本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。