1.本发明涉及到卫星终端测试技术领域,特别涉及一种导航终端对天高动态测试方法。
背景技术:
2.目前,随着卫星导航技术的快速发展,卫星导航终端的测试需求越来也多样化。传统的卫星导航终端测试一般在暗室中,通过模拟器模拟播发不同场景进行闭环测试为主,被测设备也以普通用户终端为主,无法开展定向用户终端和高动态用户终端的测试。而在室外对天进行试验则测试设备的局限性,无法开展高动态场景下的测试,只可实现静态或低动态场景下的测试。
技术实现要素:
3.有鉴于此,本发明提供了一种导航终端对天高动态测试方法。该方法拓展了高动态导航终端测试应用领域。
4.为了实现上述目的,本发明所采取的技术方案为:
5.一种导航终端对天高动态测试方法,具体包括以下步骤:
6.步骤1,通过上位机对高精度旋转平台设置高动态场景初始状态和工作模式;
7.步骤2,北斗授时接收机向高精度旋转平台的控制电路模块发送授时信息及1pps同步信号;
8.步骤3,上位机向高精度旋转平台的控制电路模块发送运动信息,使高精度旋转平台进行高动态场景转动;
9.步骤4,上位机复位被测设备后,设置被测设备工作模式;
10.步骤5,上位机接收并存储高精度转台和被测设备两者各个时刻上报的位置信息;
11.步骤6,上位机对比上报的高精度转台的位置信息和被测设备上报的位置信息,得到测试结果。
12.进一步的,所述步骤1中设置高动态场景初始状态和工作模式,具体包括:
13.(101)设置高精度转台位置归零;
14.(102)设置测试点位;
15.(103)设置高精度转台微倾角度;
16.(104)高精度转台工作模式包括角速度模式和角加速度模式;在角速度模式下,设定角速度值;在角加速度模式下,设定角加速度值及最大角速度值。
17.进一步的,所述步骤2具体为:北斗授时接收机接收空间导航信号,解得时间信息后,与空间信号时间同步;通过串口和射频线缆分别输出授时信息和1pps同步信号至控制电路模块。
18.进一步的,所述步骤4中设置被测设备工作模式,具体包括:
19.(401)设置被测设备参与定位的系统和工作频点;
20.(402)设置被测设备输出的数据类型。
21.本发明采取上述技术方案所产生的有益效果在于:
22.1、本发明可以通过有效利用空间真实导航信号进行测试,测试结果更加精准。
23.2、本发明通过高精度转台模拟各种高动态场景,可以对被测设备的各种使用场景覆盖,测试场景更加充分。
24.3、本发明通过高精度转台架设双天线,并调整转台的微倾角可对被测设备的定向、俯仰角精度进行测试。
附图说明
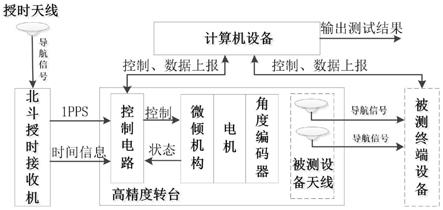
25.图1为本发明实施例中天高动态测试系统的原理框图。
具体实施方式
26.下面,结合附图和具体实施方式对本发明做进一步的说明。
27.为了更清楚地说明本发明实施例的技术方案,下面将对实施例的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
28.一种导航终端对天高动态测试系统,包括上位机,还包括用于固定被测设备的高精度旋转平台和北斗授时接收机;
29.所述上位机用于设置高精度转台的相关参数,接收并比对被测设备和高精度转台上报的数据;上位机和北斗授时接收机通过高精度旋转平台的控制电路模块连接;
30.所述控制电路模块用于接收来自北斗授时接收机的1pps秒信号和时间信息,实现时间同步,同时,还用于接收上位机下发的相关参数并向上位机反馈高精度旋转平台的状态信息;
31.高精度旋转平台的电机驱动器和角度编码器通过控制电路模块与上位机电连接;所述被测设备与上位机连接,用于向上位机发送其各个时刻的位置信息。
32.参照上述的导航终端对天高动态测试系统通过上位机的测试评估软件对转台的高动态运动场景进行设置;同时的北斗授时接收机接收空间信号,解得授时信息及秒同步信号,并将授时信息及同步信号输出至转台的控制电路模块;转台以设置场景转动并将各个时刻位置信息输出至测试评估软件;转台上安装的被测设备接收导航信号并解得定位等信息并输出至测试评估软件;测试评估软件将数据写入数据库后,从数据库中读取相同时刻或通过插值得到相同时刻的数据进行比对,得到测试结果。
33.一种导航终端对天高动态测试方法采用上述的导航终端对天高动态测试系统,通过上位机的测试评估软件对转台的高动态运动场景进行设置;同时的北斗授时接收机接收空间信号,解得授时信息及秒同步信号,并将授时信息及同步信号输出至转台的控制电路模块;转台以设置场景转动并将各个时刻位置信息输出至测试评估软件;转台上安装的被测设备接收导航信号并解得定位等信息并输出至测试评估软件;测试评估软件将数据写入数据库后,从数据库中读取相同时刻或通过插值得到相同时刻的数据进行比对,得到测试结果。
34.该方法基于如图1所示的设备实现,具体包括以下步骤:
35.(1)测试评估软件设置高精度旋转平台设置高动态场景工作模式;
36.(2)北斗授时接收机为控制电路模块提供授时信息(zda时间信息)及1pps同步信号;
37.(3)测试评估软件控制转台以设置的高动态场景转动;
38.(4)测试评估软件复位被测用户终端设备后,设置被测设备工作模式;
39.(5)测试评估软件接收并存储转台各个时刻位置信息(时间、经度、纬度、高度)、被测设备各个时刻测的位置信息(时间、经度、纬度、高度);
40.(6)测试评估软件对比转台上报和被测设备上报的位置信息(经度、纬度、高度),得到测试结果。
41.进一步的,所述步骤(1)中对测试评估软件设置高精度旋转平台设置初始状态及工作模式的具体方式为:
42.(101)将转台转动至北向(零位)位置,通过界面上,然后点击归零补偿,设置转台归零。
43.(102)在软件界面设置转台的位置(经度、纬度、高度)、测试点位(点位1、点位2、点位3)。
44.(103)在软件界面设置转台微倾角度(0
°
~10
°
)。
45.(104)在软件界面设置转台工作模式为角速度模式或者角加速度模式;在角速度模式下,设置角速度值;在角加速度模式下,设置角加速度值及最大角速度值。
46.进一步的,步骤(2)中对北斗授时接收机为控制电路模块授时信息及1pps同步信号具体为:北斗授时接收机接收空间导航信号,解得时间信息后(utc时,年、月、日、时、分、秒),与空间信号时间同步;通过串口和射频线缆分别输出授时信息和1pps同步信号至控制电路。
47.进一步的,步骤(4)中设置被测设备工作模式的具体方式为:
48.(401)设置被测设备参与定位的系统(北斗、gps、glonass等系统)、工作频点(b1、b2、b3、l1、l2、g1、g2等频点);
49.(402)设置被测设备输出的数据类型(gga、gsv、zda等);
50.进一步的,步骤(5)中测试评估软件接收并存储转台各个时刻位置信息、被测设备各个时刻测的位置信息的具体方式为:测试评估软件接收到转台和被测设备数据写入数据库。
51.进一步的,步骤(6)中测试评估软件对比转台上报和被测设备上报的位置信息,测得被测设备定位偏差的具体方式为:测试评估软件从数据库读取相同时刻或通过插值得到的相同时刻的数据,对相同时刻位置或角度数据进行比对得到测试结果。
52.除上述实施例外,本发明还可以有其它实施方式,凡采用等同替换或等效替换形式的技术方案,均落在本发明要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。