1.本技术涉及清洗设备技术领域,具体为一种医用器材清洗装置。
背景技术:
2.医用器材是指直接或者间接用于人体的仪器、设备、器具、体外诊断试剂及校准物、材料以及其他类似或者相关的物品,其中,可以重复使用的医用器材在使用之后,通常需要通常超声波清洗设备进行清洗消毒后才能再次使用,以避免造成交叉感染。
3.但是,现有的超声波清洗设备主要存在以下缺陷:1、由于医用器材的种类繁多,且大小各不相同,为了满足对各类大尺寸的医用器材进行清洗,现有的超声波清洗设备通常将清洗池的尺寸扩大,因此,在单独清洗较小尺寸的医用器材时,势必会造成水资源的浪费;2、清洗过程中,附着在医用器材上的医疗垃圾会转移到清洗水中,若直接将清洗废水进行排放,容易对环境造成污染,甚至会引起细菌、病毒的传播,存在安全隐患。
技术实现要素:
4.本技术的另一个目的在于提供一种结构简单,布局巧妙,使用方便,适用于清洗不同尺寸的医用器材,且有利于节省水资源的医用器材清洗装置。
5.为达到以上目的,本技术采用的技术方案为:一种医用器材清洗装置,包括机箱、清洗架、超声波发生器、带有第一阀门的第一管道以及带有第二阀门的第二管道;所述机箱包括上端设有开口的箱体以及盖设于所述开口上的箱盖;所述超声波发生器以及第一管道设置于所述箱盖上;所述清洗架为空心的多棱柱状结构,所述清洗架的两端可转动设置于所述箱体内;所述清洗架的各个侧面均凹陷形成有至少一个清洗池,所述清洗架的各个侧面上的所述清洗池的尺寸互不相等;各所述清洗池的内底部均设有排污口,各所述排污口上均连接有一个所述第二管道;各所述第二管道上偏离所述排污口的一端沿所述清洗架的转动轴线贯穿至所述箱体外部;当其中一个所述清洗池随所述清洗架转动至所述开口位置时,所述第一管道用于向该所述清洗池中通入清洗液或消毒气体,所述超声波发生器用于向该所述清洗池中发射超声波,与该所述清洗池对应的所述第二管道用于排出该所述清洗池内的所述清洗废水。
6.优选的,所述机箱还包括罩盖,所述罩盖可升降地设置于所述箱盖的内部;当其中一个所述清洗池转动至所述开口位置时,所述罩盖向下运动至与所述清洗架的侧面接触,得以密封该所述清洗池。其优点是:在所述罩盖的作用下,得以在使用时对所述清洗池进行密封,以防止清洗液(如清洗水)、清洗废水以及消毒气体(如蒸汽)排入所述箱体内部,并可以减少消毒气体(如蒸汽)的散失。
7.优选的,所述超声波发生器可水平滑动地设置于所述罩盖的内顶部。其优点是:可以调整所述超声波发生器的水平位置,使得所述超声波发生器运动至所述清洗池的正上方,提高清洗效果;当所述清洗池的尺寸较大时,还可以控制所述超声波发生器在所述清洗池的上方沿所述丝杠的轴向往复运动,以提高清洗效果。
8.优选的,所述医用器材清洗装置还包括用于驱动所述超声波发生器滑动的第一驱动件,所述第一驱动件包括第一电机、第一传动组件以及两个丝杠;两个所述丝杠相互平行地且可转动地安装于所述罩盖的内顶部,所述超声波发生器螺纹连接于两个所述丝杠上;所述第一电机设置于所述罩盖的外顶部,所述第一电机的输出轴通过所述第一传动组件与两个所述丝杠连接;当所述第一电机通过所述第一传动组件驱动两个所述丝杠转动时,所述超声波发生器沿所述丝杠的轴向运动。其优点是:通过第一电机驱动所述第一传动组件,得以带动两个所述丝杠同时转动,从而可以迫使所述超声波发生器沿所述丝杠的轴向运动,从而可以调整所述超声波发生器的水平位置,使得所述超声波发生器运动至所述清洗池的正上方,提高清洗效果;当所述清洗池的尺寸较大时,还可以控制所述超声波发生器在所述清洗池的上方沿所述丝杠的轴向往复运动,以提高清洗效果。
9.优选的,所述超声波发生器为两个;当两个所述丝杠转动时,两个所述超声波发生器相向运动或背向运动;所述清洗架的至少一个侧面上沿所述丝杠的轴线方向设有两个所述清洗池。其优点是:可以在尺寸较小的所述清洗池所在的所述清洗架的侧面上,设置两个所述清洗池,以便提高所述清洗架的利用率,并同时可以提高一次清洗医用器材的数量。另外,通过两个所述丝杠可以带动两个所述超声波发生器相向运动或背向运动,使得两个所述超声波发生分别运动至对应的两个所述清洗池的正上方,以便分别向两个所述清洗池内发射超声波。
10.优选的,所述箱体内设有隔板,所述隔板用于将所述箱体分隔成第一腔室以及第二腔室,所述开口形成于所述第一腔室上端;所述医用器材清洗装置还包括用于驱动所述清洗架转动的第二驱动件;所述第二驱动件包括第二电机、第二传动组件以及两个空心的固定轴;所述第二电机与所述第二传动组件均设置于所述第二腔室内;两个所述固定轴的一端分别固定于所述清洗架的两端,两个所述固定轴的另一端分别可转动安装于所述第一腔室的内侧壁;其中一个所述固定轴贯穿至所述第二腔室内,并通过所述第二传动组件与所述第二电机的输出轴连接。其优点是:通过两个所述固定轴可以实现对所述清洗架的可转动安装,并通过所述第二驱动件可以驱动所述固定轴(即所述清洗架)发生转动,操控方便,自动化程度高。另外,在所述隔板的作用下,得以形成所述第一腔室以及所述第二腔室,从而可以将所述清洗架与所述第二驱动件分隔开,安全性更高。此外,由于所述固定轴为空心结构,因此所述第二管道可以直接通过所述固定轴的内部贯穿至所述清洗架的外部,且所述第二管道可以随所述固定轴(即所述清洗架)同步转动,不会产生相互干涉。
11.优选的,所述箱盖上靠近所述第二腔室的一端铰接于所述第二腔室的上端;所述医用器材清洗装置还包括用于驱动所述箱盖翻转的开盖机构;所述开盖机构包括转动臂以及伸缩气缸,所述转动臂的一端固定于所述箱盖上,所述转动臂的另一端铰接于所述伸缩气缸的一端,所述伸缩气缸的另一端铰接于所述第二腔室的内侧壁;所述第一管道包括第一刚性管、第二刚性管以及柔性管;所述第一刚性管固定于所述罩盖的外顶部,所述第一刚性管的一端贯穿至所述罩盖内部并形成有至少一个出液口;所述第二刚性管固定于所述箱体的内部,所述第二刚性管的一端通过所述柔性管连通于所述第一刚性管的另一端,所述第二刚性管的另一端贯穿至所述箱体的外部;所述第一阀门设置于所述第二刚性管上。其优点是:当控制所述伸缩气缸收缩时,得以通过所述转动臂带动所述箱盖打开;当控制所述伸缩气缸伸长时,得以通过所述转动臂带动所述箱盖关闭,并可以压紧所述箱盖,使得所述
箱盖无法打开。另外,所述伸缩气缸隐藏在所述第二腔室的内部,安全性更高,且更加美观。此外,在所述柔性管的作用下,可以避免对所述罩盖的上下运动以及所述箱盖的开闭造成干涉;同时,在所述第一刚性管以及所述第二刚性管的作用下,可以避免使用过程中发生晃动或者位移,从而可以避免对所述罩盖的上下运动以及所述清洗架的转动产生干涉。
12.优选的,所述第二阀门位于所述清洗架的内部,且所述第二阀门为电动阀;所述医用器材清洗装置还包括用于向所述第二阀门提供电源的旋转接线盒;所述旋转接线盒设置于所述第二腔室内,所述旋转接线盒包括盒体、盒盖、多个导电触头以及多个直径不等的导电圆环;所述盒体同轴安装于所述固定轴上偏离所述清洗架的一端,所述盒盖可转动连接于所述盒体上偏离所述固定轴的一端,且所述盒盖与所述盒体之间形成密封;多个所述导电圆环的同轴安装于所述盒体内,多个所述导电触头间隔设置于所述盒盖内,多个所述导电触头的一端分别与多个所述导电圆环接触,多个所述导电触头的另一端贯穿至所述盒盖的外部。其优点是:通过所述旋转接线盒,可以在所述清洗架转动的同时,将电源引入到所述清洗架的内部,以便实现对所述第二阀门的自动控制。
13.优选的,所述清洗池内可拆卸连接有网板,所述网板与所述清洗池的内底部之间留有间隔。其优点是:当医用器材直接放在所述清洗池内时,医用器材与所述清洗池的内底面之间容易残留清洗废渣,清洗效果一般较差。但是,在所述网板的作用下,可以将医用器材与所述清洗池内底面分隔开,得以提高对医用器材的清洗效果。
14.优选的,所述第二管道上偏离所述排污口的一端设有弯折部;当所述清洗池转动至所述开口位置时,与该所述清洗池对应的所述弯折部朝下布置。其优点是:所述弯折部既可以对所述清洗废水起到导流作用,又可以避免从第二管道内排出的所述清洗废水沿所述第二管道的外壁回流至所述清洗架的内部。
15.与现有技术相比,本技术的有益效果在于:由于所述清洗架的两端可转动设置于所述箱体内,所述清洗架的各个侧面均凹陷形成有至少一个所述清洗池,且所述清洗架的各个侧面上的所述清洗池的尺寸互不相等,因此,清洗时,可以根据需要清洗的医用器材的实际尺寸,并通过转动所述清洗架,使得不同尺寸的所述清洗池面向所述开口,以便选择合适尺寸的所述清洗池,将需要清洗的医用器材放入对应的所述清洗池内,得以避免对水资源造成浪费。清洗结束后,打开所述第二阀门,得以所述第二管道直接将所述清洗废水排入所述罐体内。清洗结束后,还可以通过所述第一管道向所述清洗池内通入消毒气体,以便对医用器材进行消毒。
附图说明
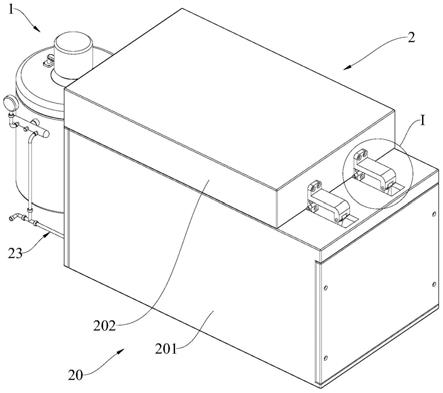
16.图1为本技术提供的一种医疗垃圾处理装置和一种医用器材清洗装置的立体图。
17.图2为图1中i处的局部放大图。
18.图3为图1中医疗垃圾处理装置的放大图。
19.图4和图5分别为图3中ii、iii处的局部放大图。
20.图6为图3中医疗垃圾处理装置的爆炸图。
21.图7为图6中部分结构的爆炸图,展示了搅拌机构。
22.图8为图7中iv处的局部放大图。
23.图9为图1中医用器材清洗装置的爆炸图。
24.图10为图9中的罩盖在俯视状态下的立体图,展示了第一驱动件。
25.图11为图9中部分结构的爆炸图,展示了第二驱动件以及第二管道。
26.图12为图11中v处的局部放大图。
27.图13为图11中旋转接线盒的爆炸图。
28.图14为图1中的剖视图,展示了医用器材清洗装置以及医疗垃圾处理装置的工作原理。
29.图15-20分别为图14中vi、vii、viii、ix、x、xi处的局部放大图。
30.图21为棘轮与棘爪的工作原理图。
31.图中:1、医疗垃圾处理装置;11、罐体;111、内导热罐;1111、进液口;1112、排气口;112、外保温罐;113、罐盖;12、加热器;13、排液管;131、控制阀;14、搅拌机构;141、搅拌电机;142、搅拌叶片;1421、容纳腔;1422、轴孔;143、刮刀;144、安装轴;1441、限位块;1442、滑块;145、棘轮;1451、滑槽;146、棘爪;147、弹性件;148、电磁铁;149、复位弹簧;15、压力表;16、泄压阀;17、液位检测器;18、排气管;181、排气阀;19、进水管;191、进水阀;2、医用器材清洗装置;20、机箱;201、箱体;2011、隔板;2012、第一腔室;2013、第二腔室;202、箱盖;203、罩盖;21、清洗架;211、清洗池;212、排污口;213、网板;214、卡块;22、超声波发生器;23、第一管道;2301、第一刚性管;2302、第二刚性管;2303、柔性管;231、第一阀门;24、第二管道;241、第二阀门;242、弯折部;25、第一驱动件;251、第一电机;252、第一传动组件;253、丝杠;254、防护罩;26、第二驱动件;261、第二电机;262、第二传动组件;263、固定轴;27、开盖机构;271、转动臂;272、伸缩气缸;28、旋转接线盒;281、盒体;282、盒盖;283、导电触头;284、导电圆环;29、驱动气缸。
具体实施方式
32.下面,结合具体实施方式,对本技术做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
33.在本技术的描述中,需要说明的是,对于方位词,如有术语“中心”、“横向”、“纵向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示方位和位置关系为基于附图所示的方位或位置关系,仅是为了便于叙述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定方位构造和操作,不能理解为限制本技术的具体保护范围。本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。本技术的说明书和权利要求书中的术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
34.参照图1以及图3,本技术的一个实施例提供一种医疗垃圾处理装置1,医疗垃圾处理装置1用于处理医用器材清洗装置2在清洗过程中所产生的清洗废水。医疗垃圾处理装置1包括罐体11、加热器12(如图14所示)以及带有控制阀131的排液管13;罐体11的内底部与排液管13连通,罐体11上贯穿设有用于引入清洗废水的进液口1111;加热器12设置于罐体11上,并用于对罐体11内部的清洗废水进行加热消毒。工作时,通过进液口1111将医用器材
清洗装置2在清洗过程中所产生的清洗废水引入罐体11的内部,并通过启动加热器12,将罐体11内部的清洗废水加热煮沸,以对清洗废水进行消毒处理。消毒后,打开控制阀131,通过排液管13将消毒后的清洗废水直接排放到下水道内。整个过程操作简单,使用方便,可有效地对清洗废水进行消毒处理,避免对环境造成污染,并降低细菌、病毒的传播风险。
35.参照图6、图7以及图8,在本技术的一些实施例中,医疗垃圾处理装置1还包括搅拌机构14;搅拌机构14包括搅拌电机141、搅拌叶片142、刮刀143、安装轴144、棘轮145、棘爪146以及弹性件147;搅拌电机141设置于罐体11的上端,搅拌电机141的输出轴贯穿至罐体11的内部后,再与搅拌叶片142连接;搅拌叶片142的上端形成有容纳腔1421,棘轮145同轴可转动设置于容纳腔1421内,棘爪146可转动设置于容纳腔1421内;弹性件147设置于容纳腔1421内,弹性件147用于迫使棘爪146与棘轮145啮合;安装轴144的上端同轴设置于棘轮145上,安装轴144的下端与刮刀143连接。结合图14和图20,当启动搅拌电机141后,搅拌电机141的输出轴驱动搅拌叶片142转动,得以在煮沸过程中,通过搅拌叶片142不断对清洗废水进行搅拌,以避免清洗废水中的杂质发生沉淀。如图21所示,当搅拌电机141驱动搅拌叶片142逆时针转动时,棘爪146不会对棘轮145产生扭矩,此时棘轮145不会发生转动,即安装轴144以及刮刀143不会转动;当搅拌电机141驱动搅拌叶片142顺时针转动时,棘爪146对棘轮145产生扭矩,棘轮145得以随搅拌叶片142同时转动,此时,刮刀143对罐体11的内壁进行刮洗,以便及时清理附着在罐体11内壁上的沉淀物。
36.参照图7以及图8,在本技术的一些实施例中,搅拌机构14还包括电磁铁148以及复位弹簧149;安装轴144可上下滑动地连接于棘轮145,且安装轴144与棘轮145之间不可发生相对转动;复位弹簧149设置于容纳腔1421内,复位弹簧149用于迫使安装轴144向上滑动;电磁铁148为环状结构,电磁铁148固定于罐体11的上端,电磁铁148套接于搅拌电机141的输出轴上,电磁铁148用于迫使安装轴144向下滑动。如图14所示,在复位弹簧149的作用下,得以迫使安装轴144向上滑动,使得刮刀143与罐体11的内底面分离,当需要对罐体11的内底面进行刮洗时,逐渐启动电磁铁148,使得电磁铁148的磁力逐渐增加,得以迫使安装轴144缓慢向下滑动,从而使得刮刀143逐步与沉淀物接触,以便逐步将罐体11内底面附着的沉淀刮除干净,同时可以减低搅拌电机141的瞬时负载以及刮刀143造成的磨损;否则,若刮刀143直接与罐体11的内底面接触,当启动刮刀143的瞬间,刮刀143受到沉淀物的阻力最大,既容易增加搅拌电力的瞬时负载,又容易加剧刮刀143的磨损,严重时甚至会使刮刀143报废。另外,当刮刀143沿安装轴144径向的两端分别与罐体11的内侧壁接触时,可以同时对罐体11的内侧壁进行刮洗;在电磁铁148以及复位弹簧149的作用下,可以通过安装轴144带动刮刀143上下滑动,在刮刀143尺寸相同的情况下,可以提高刮刀143的刮洗面积,在相同刮洗面积的情况下,可以降低刮刀143的尺寸。需要说明的是,本技术对安装轴144与棘轮145之间的滑动安装方式不进行限定,例如,如图21所示,可以在棘轮145的轴线上贯穿设置滑槽1451,并可以在安装轴144上设置滑块1442,通过滑块1442与滑槽1451之间的滑动配合,得以实现安装轴144与棘轮145之间的滑动连接,并可以避免安装轴144与棘轮145之间发生相对转动。另外,电磁铁148吸引安装轴144的方式为现有技术,例如可以在安装轴144的上端设置限位块1441,限位块1441的本身为磁铁,或者限位块1441的内部填充有磁铁;同时,限位块1441还可以对复位弹簧149进行限位。
37.参照图6以及图7,搅拌叶片142上沿上下方向设有圆柱形的轴孔1422,安装轴144
滑动连接于轴孔1422内,通过轴孔1422可以加强对安装轴144固定效果,得以提高安装轴144转动过程中的稳定性。
38.参照图4,在本技术的一些实施例中,医疗垃圾处理装置1还包括压力表15以及泄压阀16,压力表15通过泄压阀16与排气口1112连通。通过压力表15可以反馈罐体11内部的压力,通过泄压阀16可以防止罐体11内部气压过高。
39.参照图14,在本技术的一些实施例中,医疗垃圾处理装置1还包括液位检测器17,液位检测器17设置于罐体11上,并用于检测罐体11内部的液位。通过液位检测器17可以及时检测罐体11内部的液位,以便及时补充水源,避免出现干烧现象。
40.参照图6,在本技术的一些实施例中,罐体11包括内导热罐111、外保温罐112、保温填料(保温填料在附图中未画出)以及罐盖113;内导热罐111的上端为敞口结构,外保温罐112套设于内导热罐111的外部,罐盖113可拆卸地设置于外保温罐112的上端;加热器12安装于内导热罐111的外底部与外保温罐112的内底部之间(如图14所示);保温填料填充于内导热罐111与外保温罐112之间。如图14所示,通过将加热器12设置在内导热罐111与外保温罐112之间,既可以满足对内导热罐111内部的清洗废水进行加热,又可以避免加热器12直接与清洗废水接触。另外,外保温罐112以及保温填料可以充分对内导热罐111进行保温,以减少热量的散失,节省能耗。此外,通过可拆卸设置的罐盖113,便于对罐体11内部进行清洗以及便于对搅拌机构14进行清洗与维护。需要说明的是,加热器12的本身以及罐盖113的可拆卸安装方式均为现有技术,在此不做详细赘述。
41.参照图9、图10以及图11,在本技术的一些实施例中,医用器材清洗装置2包括机箱20、清洗架21、超声波发生器22、带有第一阀门231的第一管道23以及带有第二阀门241的第二管道24;机箱20包括上端设有开口的箱体201以及盖设于开口上的箱盖202;超声波发生器22以及第一管道23设置于箱盖202上;清洗架21为空心的多棱柱状结构,清洗架21的两端可转动设置于箱体201内;清洗架21的各个侧面均凹陷形成有至少一个清洗池211,清洗架21的各个侧面上的清洗池211的尺寸互不相等;各清洗池211的内底部均设有排污口212,各排污口212上均连接有一个第二管道24;各第二管道24上偏离排污口212的一端沿清洗架21的转动轴线贯穿至箱体201外部后,再通过进液口1111延伸至罐体11的内部;当其中一个清洗池211随清洗架21转动至开口位置时,第一管道23用于向该清洗池211中通入清洗液或消毒气体,超声波发生器22用于向该清洗池211中发射超声波,与该清洗池211对应的第二管道24用于将该清洗池211内的清洗废水排入罐体11的内部。清洗时,可以根据需要清洗的医用器材的实际尺寸,并通过转动清洗架21,使得不同尺寸的清洗池211面向开口,以便选择合适尺寸的清洗池211,将需要清洗的医用器材放入对应的清洗池211内,得以避免对水资源造成浪费。清洗结束后,打开第二阀门241,得以第二管道24直接将清洗废水排入罐体11内。清洗结束后,还可以通过第一管道23向清洗池211内通入消毒气体,以便对医用器材进行消毒。
42.参照图4以及图5,在本技术的一些实施例中,罐体11为封闭结构,罐体11上设有排气口1112,排气口1112以及进液口1111均位于罐体11内液位的上方,得以避免罐体11内部的液体通过排气口1112以及进液口1111排出。第二管道24可转动连接于进液口1111,第二管道24的转动轴线与清洗架21的转动轴线重合,且第二管道24与进液口1111之间形成密封,得以在清洗架21发生转动的同时,始终维持各第二管道24与罐体11内部的连通和密封。
第二管道24上位于罐体11内部的一端设有弯折部242,当清洗池211转动至开口位置时,对应该清洗池211的弯折部242延伸至罐体11内的液位中;此时,既可以避免排出的清洗废水沿第二管道24的外壁渗出至罐体11的外部,又可以防止流入罐体11内部的清洗废水飞溅到罐体11的内侧壁上,还可以避免罐体11内部产生的高温蒸汽通过第二管道24进入清洗池211内。医疗垃圾处理装置1还包括带有排气阀181的排气管18以及带有进水阀191的进水管19;排气管18的一端与排气口1112连通,排气管18的另一端与第一管道23连通;进水管19的一端连通于第一管道23以及排气管18,进水管19的另一端连通水源。当打开进水阀191以及第一阀门231,并关闭排气阀181时,水源依次通过进水管19和第一管道23进入到对应的清洗池211内,从而可以实现向清洗池211内提供清洗水。当关闭进水阀191,并打开排气阀181以及第一阀门231时,罐体11内的清洗废水因煮沸而产生的高温蒸汽,依次通过排气口1112、排气管18以及第一管道23进入到对应的清洗池211内,从而可以有效地对清洗池211、第二管道24以及清洗后的医用器材进行消毒,得以充分利用煮沸清洗废水所产生的高温蒸汽进行消毒,有利于降低对能源的消耗;同时,蒸汽液化后又会依次通过排污口212和第二管道24重新回流至罐体11内,从而可以避免对水资源造成浪费。当关闭第一阀门231,并打开进水阀191以及排气阀181时,水源依次通过进水管19、排气管18以及排气口1112进入到罐体11内部,从而可以及时向罐体11内部补充水源,避免出现干烧;当罐体11内的清洗废水排尽后,还可以通入水源对罐体11内部进行清洗。需要说明的是,在医用器材清洗装置2单独使用的情况下,当清洗池211转动至开口位置时,与该清洗池211对应的弯折部242朝下布置;弯折部242既可以对清洗废水起到导流作用,又可以避免从第二管道24内排出的清洗废水沿第二管道24的外壁回流至清洗架21的内部。如图11所示,各第二管道24集成一束后,再沿顺时针或逆时针扭转180
°
,即可实现第二管道24的一端朝上(以完成与排污口212之间的连通),且第二管道24另一端连接的弯折部242的开口朝下。
43.参照图9以及图10,在本技术的一些实施例中,机箱20还包括罩盖203,罩盖203可升降地设置于箱盖202的内部;当其中一个清洗池211转动至开口位置时,罩盖203向下运动至与清洗架21的侧面接触,得以密封该清洗池211。结合图14和图17,在罩盖203的作用下,在清洗以及消毒时,驱动罩盖203向下运动,以对清洗池211进行密封,得以防止清洗水、清洗废水以及蒸汽排入箱体201内部,并可以减少蒸汽的散失。在清洗架21需要转动时,驱动罩盖203向上运动,以避免罩盖203对清洗架21的转动产生干涉。本技术对罩盖203的可升降安装方式不进行限定,例如在箱盖202内顶部设置驱动气缸29,驱动气缸29的伸缩端与罩盖203连接,通过控制驱动气缸29的伸缩量,即可实现罩盖203升降(即上下)运动。
44.参照图9以及图10,在本技术的一些实施例中,超声波发生器22可水平滑动地设置于罩盖203的内顶部;医用器材清洗装置2还包括用于驱动超声波发生器22滑动的第一驱动件25,第一驱动件25包括第一电机251、第一传动组件252以及两个丝杠253;两个丝杠253相互平行地且可转动地安装于罩盖203的内顶部,超声波发生器22螺纹连接于两个丝杠253上;第一电机251设置于罩盖203的外顶部,第一电机251的输出轴通过第一传动组件252与两个丝杠253连接;当第一电机251通过第一传动组件252驱动两个丝杠253转动时,超声波发生器22沿丝杠253的轴向运动。如图14所示,通过第一电机251驱动第一传动组件252,得以带动两个丝杠253同时转动,从而可以迫使超声波发生器22沿丝杠253的轴向运动,从而可以调整超声波发生器22的水平位置,使得超声波发生器22运动至清洗池211的正上方,提
高清洗效果;当清洗池211的尺寸较大时,还可以控制超声波发生器22在清洗池211的上方沿丝杠253的轴向往复运动,以提高清洗效果。
45.参照图10,在本技术的一些实施例中,超声波发生器22为两个;当两个丝杠253转动时,两个超声波发生器22相向运动或背向运动(即丝杠253上设有两段不同螺旋方向的螺纹);清洗架21的至少一个侧面上沿丝杠253的轴线方向设有两个清洗池211。如图14所示,可以在尺寸较小的清洗池211所在的清洗架21的侧面上,设置两个清洗池211,以便提高清洗架21的利用率,并同时可以提高一次清洗医用器材的数量。另外,通过两个丝杠253可以带动两个超声波发生器22相向运动或背向运动,使得两个超声波发生分别运动至对应的两个清洗池211的正上方,以便分别向两个清洗池211内发射超声波。此外,还可以在罩盖203上设置防护罩254,通过防护罩254将第一电机251以及第一传动组件252罩住,以防止使用过程中柔性管2303对第一电机251以及第一传动组件252造成干涉。
46.参照图14,在本技术的一些实施例中,箱体201内设有隔板2011,隔板2011用于将箱体201分隔成第一腔室2012以及第二腔室2013,开口形成于第一腔室2012上端。如图11所示,医用器材清洗装置2还包括用于驱动清洗架21转动的第二驱动件26;第二驱动件26包括第二电机261、第二传动组件262以及两个空心的固定轴263;第二电机261与第二传动组件262均设置于第二腔室2013内;两个固定轴263的一端分别固定于清洗架21的两端,两个固定轴263的另一端分别可转动安装于第一腔室2012的内侧壁;如图15所示,其中一个固定轴263贯穿至第二腔室2013内,并通过第二传动组件262与第二电机261的输出轴连接;如图16所示,另一个固定轴263可转动连接于进液口1111,并与进液口1111之间形成密封。如图14所示,通过两个固定轴263可以实现对清洗架21的可转动安装,并通过第二驱动件26可以驱动固定轴263(即清洗架21)发生转动,操控方便,自动化程度高。另外,在隔板2011的作用下,得以形成第一腔室2012以及第二腔室2013,从而可以将清洗架21与第二驱动件26分隔开,安全性更高。此外,由于固定轴263为空心结构,因此第二管道24可以直接通过固定轴263的内部贯穿至清洗架21的外部;又由于固定轴263可转动连接于进液口1111,因此,从固定轴263内部穿出来的第二管道24可以直接引入罐体11内部,且第二管道24可以随固定轴263(即清洗架21)同步转动,不会产生相互干涉;而且,固定轴263与进液口1111之间以及第二管道24与固定轴263之间均形成密封,故不会破坏罐体11的密封性。
47.参照图2以及图14,在本技术的一些实施例中,箱盖202上靠近第二腔室2013的一端铰接于第二腔室2013的上端;医用器材清洗装置2还包括用于驱动箱盖202翻转的开盖机构27;开盖机构27包括转动臂271以及伸缩气缸272,转动臂271的一端固定于箱盖202上,转动臂271的另一端铰接于伸缩气缸272的一端,伸缩气缸272的另一端铰接于第二腔室2013的内侧壁。当控制伸缩气缸272收缩时,得以通过转动臂271带动箱盖202打开;当控制伸缩气缸272伸长时,得以通过转动臂271带动箱盖202关闭,并可以压紧箱盖202,使得箱盖202无法打开。另外,伸缩气缸272隐藏在第二腔室2013的内部,安全性更高,且更加美观。
48.参照图14以及图17,在本技术的一些实施例中,第一管道23包括第一刚性管2301、第二刚性管2302以及柔性管2303;第一刚性管2301固定于罩盖203的外顶部,第一刚性管2301的一端贯穿至罩盖203内部并形成有至少一个出液口(如图18所示),使得清洗架21各个侧面上的各个清洗池211均对应有至少一个出液口;第二刚性管2302固定于箱体201的内部,第二刚性管2302的一端通过柔性管2303连通于第一刚性管2301的另一端,第二刚性管
2302的另一端贯穿至箱体201的外部后,再分别与排气管18以及进水管19连通;第一阀门231设置于第二刚性管2302上。如图17所示,在柔性管2303的作用下,可以避免对罩盖203的上下运动以及箱盖202的开闭造成干涉;同时,在第一刚性管2301以及第二刚性管2302的作用下,可以避免使用过程中发生晃动或者位移,从而可以避免对罩盖203的上下运动以及清洗架21的转动产生干涉。
49.参照图14以及图19,在本技术的一些实施例中,第二阀门241位于清洗架21的内部,且第二阀门241为电动阀。如图13所示,医用器材清洗装置2还包括用于向第二阀门241提供电源的旋转接线盒28;旋转接线盒28设置于第二腔室2013内,旋转接线盒28包括盒体281、盒盖282、多个导电触头283以及多个直径不等的导电圆环284;盒体281同轴安装于固定轴263上偏离清洗架21的一端,盒盖282可转动连接于盒体281上偏离固定轴263的一端,且盒盖282与盒体281之间形成密封;多个导电圆环284的同轴安装于盒体281内,多个导电触头283间隔设置于盒盖282内,多个导电触头283的一端分别与多个导电圆环284接触,多个导电触头283的另一端贯穿至盒盖282的外部。如图15所示,当第二电机261通过第二传动组件262带动固定轴263发生转动时,盒体281以及盒体281上同心设置的多个导电圆环284同步转动,而盒盖282以及盒盖282上间隔设置的多个导电触头283可以固定在第二腔室2013内,得以将外部电源接通在静止的导电触头283上,并通过导电触头283与导电圆环284之间的转动连接,始终维持导电触头283与导电圆环284之间的电路导通,得以通过在固定轴263的内部设置导线,以将导电圆环284上的电力输送至对应的第二阀门241上,以实现对第二阀门241的自动控制,且不会对清洗架21的转动产生干涉。
50.参照图12,在本技术的一些实施例中,清洗池211内可拆卸连接有网板213,网板213与清洗池211的内底部之间留有间隔。当医用器材直接放在清洗池211内时,医用器材与清洗池211的内底面之间容易残留清洗废渣,清洗效果一般较差。但是,在网板213的作用下,可以将医用器材与清洗池211内底面分隔开,得以提高对医用器材的清洗效果。本技术对网板213的可拆卸安装方式不进行限定,例如可以在清洗池211的内侧壁上设置卡块214,通过卡块214将网板213卡接在清洗池211内。
51.以上描述了本技术的基本原理、主要特征和本技术的优点。本行业的技术人员应该了解,本技术不受上述实施例的限制,上述实施例和说明书中描述的只是本技术的原理,在不脱离本技术精神和范围的前提下本技术还会有各种变化和改进,这些变化和改进都落入要求保护的本技术的范围内。本技术要求的保护范围由所附的权利要求书及其等同物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。