1.本发明涉及医疗机器人技术领域,尤其涉及一种步态引导与评价康复机器人。
背景技术:
2.下肢受伤患者或者脑卒中患者,通常借助器械来辅助进行步态康复训练。目前,可通过医生对病人采用选择性手法牵拉特定肌群以达到训练的目的,然而,工作强度大,且训练效果与医生技术熟练程度有关,难以保证对病人保持康复训练动作的一致性和准确性。现有技术中,开发了能够代替医生康复机器人,然而,其难以同时满足不同康复阶段的病人的康复训练要求,训练效果较差;且现有的康复机器人功能单一,而医院采用的同时具有评价与治疗的康复机器人,结构复杂,占用面积大,患者受使用场所限制,使用不便。
技术实现要素:
3.本发明的目的在于提供一种步态引导与评价康复机器人,在步态训练时能够对患者进行步态引导,且能够采集步态信息,以便于后续评价患者康复情况。
4.为达此目的,本发明采用以下技术方案:
5.一种步态引导与评价步态引导与评价康复机器人,包括:
6.框架,能够支撑在地面上;
7.扶持并联平台,固定设置于所述框架上,用于支撑人体腰部;
8.控制单元,与所述扶持并联平台通讯连接,所述控制单元能够使所述扶持并联平台按预设轨迹运行;
9.第一检测单元,设置于所述扶持并联平台上,用于获取人体健侧和患侧分别作用于所述扶持并联平台上的拉压力,并将所述拉压力信息传递至远程主机;
10.第二检测单元,设置于所述框架上,用于获取行走过程中的步态信息,并将所述步态信息传递至远程主机。
11.可选地,所述第二检测单元包括相机,所述相机能够拍摄步态,并将拍摄的步态发送给远程主机。
12.可选地,所述相机设置有两个,两个所述相机设置于所述框架沿第一方向的两侧,并分别用于拍摄患侧与健侧的步态信息。
13.可选地,所述第二检测单元还包括一端设置于所述框架上的第一安装臂,所述第一安装臂的另一端连接于所述相机,所述相机能够通过所述第一安装臂调节角度和高度。
14.可选地,所述框架包括可拆卸连接的两个支平台、分别安装于两个所述支平台上的支撑腿,所述支撑腿能够沿竖直方向伸缩,两个所述支平台能够形成第一中空结构,所述第一中空结构能够围设于人体外周,两个所述相机分别设置于两个所述支平台上。
15.可选地,所述第一检测单元包括拉压力传感器,所述拉压力传感器用于检测所述支撑腿上的拉压力。
16.可选地,所述扶持并联平台包括动平台、定平台、设置于所述动平台和所述定平台
之间的六个运动链,所述定平台固定于框架上,所述动平台和所述定平台分别能够围绕在人体腰部的上部和下部,所述控制单元分别控制六个所述运动链的伸缩以使所述扶持并联平台按预设位姿运行。可选地,所述动平台包括可拆卸连接的两个第一支安装件,两个所述第一支安装件能够形成第二中空结构;
17.所述定平台包括可拆卸连接的两个第二支安装件,两个所述第二支安装件能够形成第三中空结构。
18.可选地,所述框架沿第二方向的一侧设置有引导射灯组件,所述控制单元能够控制所述引导射灯组件照射在地面的预设位置上形成虚拟足印。
19.可选地,所述框架上设置有牵引装置,所述控制单元能够控制所述牵引装置牵引腿部运动。
20.本发明的有益效果:
21.本发明提供的一种步态引导与评价康复机器人,训练时,框架支撑于地面,扶持并联平台支撑人体腰部,从而使人体腰部得到支撑,防止行走过程中摔倒,提高了使用安全性。具体地,通过调整扶持并联平台的实时位姿,进而控制并联平台固定的人体髋关节的位置与姿态,以模拟人体自然步行过程中髋关节运行轨迹,为脑卒中患者提供支撑力,辅助脑卒中患者进行提髋与迈步动作,实现人机协调的步态训练,通过调整并联平台的空间位姿,满足脑卒中患者不同康复阶段步态训练需求,减轻治疗师的工作负担,并且提高患者的训练效果;具体地,人体行走时髋关节运行轨迹及控制扶持并联平台调整位姿均可参照现有技术,不再赘述;具体地,不同患者及处于不同康复训练阶段的患者,其髋关节运行轨迹有所差别,可针对不同运行轨迹通过控制单元调整扶持并联平台的位姿,提高了适用性。通过控制单元控制扶持并联平台,位姿一致性和准确性高,更符合患者需求,从而进一步提高了训练效果,避免了训练效果过度依赖医生技术熟练程度。
22.远程主机分别得到通过第一检测单元和第二检测单元获取行走过程中的人体健侧和患侧分别作用于扶持并联平台的拉压力信息和步态信息;由于人体重量一定,通过拉压力信息可得到步行时健侧和患侧髋关节的辅助支撑力,进而可以分别得出健侧和患侧的足底压力;通过比较健侧和患侧的步态差异、健侧和患侧的足底压力信息,构建患者步态评价系统,以便于了解患者恢复情况,有针对性地进行下一阶段训练,形成了闭环的评价与训练,提高了训练效果。
附图说明
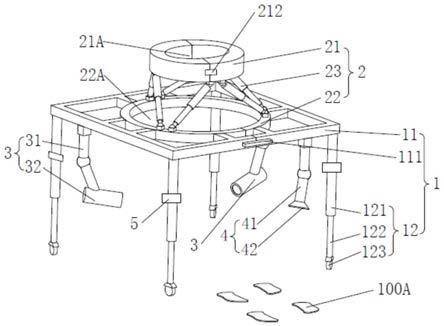
23.图1是本发明的具体实施方式提供的合并状态下的步态引导与评价康复机器人的结构示意图;
24.图2是本发明的具体实施方式提供的展开状态下的步态引导与评价康复机器人的结构示意图。
25.图中:
26.1、框架;11、支平台;111、第一卡扣;112、铰链;12、支撑腿;121、第一支撑腿;122、第二支撑腿;123、轮子;
27.2、扶持并联平台;21、动平台;211、第一支安装件;212、第二卡扣;213、柔性缓冲固定带;21a、第二中空结构;22、定平台;221、第二支安装件;22a、第三中空结构;23、运动链;
28.3、第二检测单元;31、相机;32、第一安装臂;
29.4、引导射灯组件;41、第二安装臂;42、射灯本体;
30.5、拉压力传感器。
具体实施方式
31.为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面将结合附图对本发明实施例的技术方案做进一步的详细描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
33.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
34.本实施例提供了一种步态引导与评价康复机器人,如图1所示,其包括框架1、扶持并联平台2、控制单元、第一检测单元和第二检测单元3;具体地,框架1能够支撑在地面上;扶持并联平台2固定设置于框架1上,用于支撑人体腰部;控制单元与扶持并联平台2通讯连接,控制单元能够使扶持并联平台2按预设轨迹运行;第一检测单元设置于扶持并联平台2上,用于获取人体健侧和患侧分别作用于扶持并联平台2上的拉压力,并将拉压力信息传递至远程主机;第二检测单元3设置于框架1上,用于获取行走过程中的步态信息,并将步态信息传递至远程主机。
35.训练时,框架1支撑于地面,扶持并联平台2支撑人体腰部,从而使人体腰部得到支撑,防止行走过程中摔倒,提高了使用安全性。具体地,通过调整扶持并联平台2的实时位姿,进而控制扶持并联平台2固定的人体髋关节的位置与姿态,以模拟人体自然步行过程中髋关节运行轨迹,为脑卒中患者提供支撑力,辅助脑卒中患者进行提髋与迈步动作,实现人机协调的步态训练,通过调整扶持并联平台2的空间位姿,满足脑卒中患者不同康复阶段步态训练需求,减轻治疗师的工作负担,并且提高患者的训练效果;具体地,人体行走时髋关节运行轨迹及控制扶持并联平台2调整位姿均可参照现有技术,不再赘述;具体地,不同患者及处于不同康复训练阶段的患者,其髋关节运行轨迹有所差别,可针对不同运行轨迹通过控制单元调整扶持并联平台2的位姿,提高了适用性。通过控制单元控制扶持并联平台2,位姿一致性和准确性高,更符合患者需求,从而进一步提高了训练效果,避免了训练效果过度依赖医生技术熟练程度。
36.远程主机分别得到通过第一检测单元和第二检测单元3获取行走过程中的人体健
侧和患侧分别作用于扶持并联平台2的拉压力信息和步态信息;由于人体重量一定,通过拉压力信息可得到步行时健侧和患侧髋关节的辅助支撑力,进而可以分别得出健侧和患侧的足底压力;通过比较健侧和患侧的步态差异、健侧和患侧的足底压力信息,构建患者步态评价系统,以便于了解患者恢复情况,有针对性地进行下一阶段训练,形成了闭环的评价与训练,提高了训练效果。
37.具体地,第一检测单元和第二检测单元3向远程主机发送信息可参照现有技术,不再赘述。
38.可选地,如图1所示,第二检测单元3包括相机31,相机31能够拍摄步态,并将拍摄的步态发送给远程主机。可选地,相机31设置有两个,两个相机31设置于框架1沿第一方向的两侧,并分别用于拍摄患侧与健侧的步态信息,提高拍摄准确性。进一步可选地,第二检测单元3还包括一端设置于框架1上的第一安装臂32,第一安装臂32的另一端连接于相机31,相机31能够通过第一安装臂32调节角度和高度,能够根据不同患者的身高或者康复训练阶段等信息进行调节,通过调节相机31至合适角度提高拍摄步态信息的准确性。本实施例中,第一安装臂32具有三个自由度,具体可参照三自由度的机械臂,不再赘述;相机31可进行选配使用现有技术中的相机,不再赘述。
39.可选地,如图2所示,框架1包括两个支平台11、分别安装于两个支平台11上的支撑腿12,支撑腿12分别用于支撑两个支平台11在地面上;两个支平台11能够形成第一中空结构,第一中空结构能够围设于人体外周,便于框架1围设在人体上,使用方便;支撑腿12能够沿竖直方向伸缩,能够根据患者身高进行调节,适用性强;两个相机31分别设置于两个支平台11上,保证两个相机31分别在患者的健侧和患侧。
40.具体地,如图1和图2所示,支撑腿12包括第一支撑腿121和第二支撑腿122,第一支撑腿121和第二支撑腿122沿竖直方向滑动连接,且第一支撑腿121和第二支撑腿122具有锁紧结构,调整完高度后进行锁紧,防止行走过程中第一支撑腿121与第二支撑腿122结构不稳定。
41.具体地,如图1和图2所示,第一支撑腿121和第二支撑腿122之间具有滑动结构,滑动结构为现有技术,不进行限定,本实施例中,滑动结构包括导槽和与导槽滑动配合的导块,第一支撑腿121和第二支撑腿122二者中,一个上开设有导槽,另一个上设置有导块。锁紧结构为现有技术,不进行限定,本实施例中,第一支撑腿121和第二支撑腿122沿竖直方向均可以设置有多个连接孔,调节高度后,通过紧固件穿过第一支撑腿121和第二支撑腿122上的连接孔进行锁紧。具体地,第一支撑腿121固定于安装平台上,第二支撑腿122上安装有轮子123,以方便进行行走,减小阻力,具体地,轮子123可以是万向轮,便于调整方向。具体地,可以通过主动控制轮子123的速度,满足患者不同康复阶段步态训练需求。
42.本实施例中,两个支平台11一端可拆卸连接,另一端通过铰链112铰接,形成开合结构。具体可采用插接、第一卡扣111卡接或紧固件连接等方式进行可拆卸连接。
43.可选地,扶持并联平台2包括动平台21、定平台22、设置于动平台21和定平台22之间的六个运动链23,定平台22固定于框架1上,动平台21和定平台22分别能够围绕在人体腰部的上部和下部,控制单元分别控制六个运动链23的伸缩以使扶持并联平台2按预设位姿运行。具体地,运动链23可以是电动推杆,控制单元主动控制电动推杆伸缩,以调整扶持并联平台2的空间位姿。其他实施例中,运动链23也可以是气缸、气动肌肉、液压缸或者气液混
动缸或者其他能够实现直线输出的结构,不进行限定。
44.具体地,六个运动链23、定平台22和动平台21的具体结构及工作原理均可参照现有技术中的六轴并联机器人,不再赘述。具体地,控制单元控制扶持并联平台2可参照并联机械手的控制方法和控制结构,不再赘述。通过六个运动链23,可以实现髋关节在空间中的6个自由度,进而重现人体步态过程中髋关节运动轨迹。具体地,动平台21具有第二中空结构21a,定平台22具有第三中空结构22a,第二中空结构21a和第三中空结构22a分别用于动平台21和定平台22分别能够围绕在人体腰部的上部和下部围绕在人体腰部的上部和下部。
45.训练时,将动平台21和定平台22分别通过第二中空结构21a和第三中空结构22a围绕在人体腰部上,动平台21在上部,定平台22在下部,同时框架1围设于人体;扶持并联平台2通过定平台22固定于框架1上,框架1支撑设置在地面,能够进行步态训练,并且可以从而使人体腰部通过扶持并联平台2和框架1支撑于地面,防止行走过程中摔倒,提高了使用安全性。
46.具体地,控制单元可采用工控机等,参照现有的六轴并联机器人的控制结构即可,不再赘述。
47.可选地,如图1所示,动平台21和定平台22分别呈圆环状,两个端面用于安装运动链23,第二中空结构21a和第三中空结构22a的内周面围设在人体腰部,具体地,其形状均不进行限定,实现围设于人体的功能即可。
48.可选地,动平台21包括可拆卸连接的两个第一支安装件211,两个第一支安装件211能够形成第二中空结构21a,以方便其围设于人体。具体可采用第二卡扣212卡接或其他快速连接装置进行连接,也可以采用紧固件连接,不进行限定。
49.同理,可选地,定平台22包括可拆卸连接的两个第二支安装件221,两个第二支安装件221能够形成第三中空结构22a。具体可采用卡扣卡接等快速连接装置进行连接,也可以采用紧固件连接,不进行限定。
50.本实施例中,安装平台为开合结构,动平台21和定平台22为可拆卸结构,整个装置能够绕铰链112进行打开或合并,类似于尺规,两个半边合起来就是一个整体。使用时,先处于展开状态,一个第一支安装件211及一个第二支安装件221的内壁分别卡住人体的髋部,再将另一个第一支安装件211及另一个第二支安装件221分别连接,使动平台21和定平台22分别围绕在人体,同时两个支平台11扣合,固定好后就可以进行训练;之后,类似于尺规的方式,两个半边绕铰链112张开使结构打开,患者可以从扶持并联平台2及支架单元上脱开,离开下肢康复机器人。其他实施例中,两个支平台11的两端也可以均通过可拆卸连接的方式连接。
51.具体地,两个第一支安装件211、两个第二支安装件221及两个支平台11均沿同一平面对称设置。
52.本实施例中,如图2所示,第二中空结构21a和第三中空结构22a内部还均设有柔性缓冲固定带213,以便于贴紧固定于人体;进一步地,柔性缓冲固定带213分别设置于第二中空结构21a和第三中空结构22a的内侧壁,能起到缓冲作用,提高舒适性,另外可以根据不同患者的腰部尺寸,调节固定带或者调节缓冲层厚度,以使其贴合于患者腰部。具体地,缓冲层可采用柔性材料制成。
53.具体地,如图1所示,定平台22可以安装在第一中空结构的侧壁上,或者安装在框
架1的顶部,根据安装平台的结构进行安装即可。本实施例中,安装平台为矩形架,矩形架内侧固定设置有多个安装条,多个安装条的端部形成第一中空结构,定平台22的外周固定于安装条的端部,重量较轻,且结构稳定性好。具体地,矩形架和安装条均可以是方钢结构,结构强度和刚性均较好,组装制作方便。其他实施例中,矩形架也可以是圆形架,椭圆形架或者不规则形架等,不进行限定。
54.可选地,第一检测单元包括拉压力传感器5,拉压力传感器设置于框架1上,用于检测作用于框架1上的作用力;进一步地,拉压力传感器5用于检测支撑腿12上的拉压力,从而可以获得对髋关节的辅助支撑力。具体地,如图1和图2所示,第一支撑腿121分为两段,拉压力传感器5一端连接在第一段第一支撑腿121上,另一端连接在第二段第一支撑腿121上。
55.可选地,框架1沿第二方向的一侧设置有引导射灯组件4,控制单元能够控制引导射灯组件4照射在地面的预设位置上形成虚拟足印。具体地,根据患者步态训练需求,设置患者训练时的步幅和步宽,控制单元控制引导射灯组件4在步行前方投影处相应的虚拟足印,引导患者踩在虚拟足印进行训练,从而保证了训练过程中,保持符合训练需求的步幅和步宽,提高了训练效果;具体地,步幅和步宽的设计可参照现有医生对患者治疗的相关方案,不再赘述。
56.可选地,如图1所示,引导射灯组件4包括一端固定设置于框架1的第二安装臂41和设置于第二安装臂41另一端的射灯本体42,第二安装臂41能够通过第二安装臂41调节角度和高度,能够根据不同患者的身高或者康复训练阶段等信息进行调节,通过调节射灯本体42至合适角度以保证形成的虚拟足印符合步幅和步宽需求。具体地,第二安装臂41的具体结构可参照吊装的机械臂或者机械手等,根据需求,控制单元控制第二安装臂41形成相应的运动轨迹,不再赘述。射灯本体42也可以采用现有的射灯,不再赘述。
57.可选地,框架1上设置有牵引装置,控制单元能够控制牵引装置牵引腿部运动,本实施例中辅助腿部运动以使脚部踩在虚拟足印上,辅助患者进行摆腿动作,使其动作规范,达到训练目的,提高训练效果。
58.可选地,牵引装置包括固定于框架1上的驱动件和设置于驱动件输出端的吊带,吊带用于围绕在人体腿部,驱动件可以是电机等驱动结构,通过吊带驱动腿部摆动,参照现有技术即可,不再赘述。具体地,吊带具有安装扣,方便穿戴在腿部,并且吊带能够绑紧在腿部,避免滑脱,也可以参照现有技术针对舒适性和不同腿围进行相应设置,以及可以根据需求围设在腿部位置,不再赘述。
59.根据患者康复训练需求,预先在控制单元内输入控制程序,能够调节相机31及射灯本体42至合适位置;使用时将康复机器人围设在人体上,扶持并联平台2围设在腰部,牵引装置绑在腿部,行走时,通过扶持并联平台2及牵引装置,辅助患者进行提髋及摆腿动作,起到助力作用,保证患者进行标准的步行动作,并且减少步行代谢消耗,有利于患者恢复正常步态,减少肌肉的异常代偿,通过引导射灯组件4虚拟出相应培训计划的足印,引导患者步态训练,规范训练动作,从而提高了康复训练效果,通过拉压力传感器5及相机31获取的信息评价患者当前康复情况,以便于下一次有针对性地训练。
60.显然,本发明的上述实施例仅仅是为了清楚说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本
发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。