1.本技术涉及一种自动定位技术领域,特别是涉及一种货物的定位方法、装置、系统、存储介质及电子设备。
背景技术:
2.仓库作为货物的中转站,在货物的生产流通中发挥重要作用,货物通常放置于托盘上,通过叉车叉取托盘完成货物在仓库中的入库、移库和出库等操作。货物在仓储过程中,由于货物的数量众多,为了方便对货物的管理,就需要对每件货物进行定位追踪。
3.现有货物定位的方法为利用固定在货物上的定位标签,通过无线定位技术,对定位标签所在的货物进行定位,但是在货物存放密度大、叠放的仓库应用场景中,定位标签信号被严重遮挡,造成定位误差较大,甚至信号丢失的情况发生。
技术实现要素:
4.有鉴于此,本技术提供一种货物的定位方法、装置、系统、存储介质及电子设备,主要目的在于解决以上现有技术中至少一项技术问题。
5.依据本技术一个方面,提供了一种货物的定位方法,包括:
6.获取设置在运输车上的至少两个定位标签的位置信息及其中至少一个定位标签与目标点的相对位置信息,至少两个定位标签中各个定位标签的中心位于同一直线上,目标点位于直线上;
7.根据至少两个定位标签的位置信息及相对位置信息,确定目标点的位置信息;
8.将目标点的位置信息确定为运输车所载货物的位置信息。
9.在一个实施方式中,目标点在运输车运载的载货部的承载面上的垂直投射点为承载面的中心点。
10.在一个实施方式中,根据至少两个定位标签的位置信息及相对位置信息,确定目标点的位置信息,包括:
11.根据至少两个定位标签中任意两个定位标签分别对应的位置信息,确定运输车的车头朝向;
12.根据车头朝向、其中至少一个定位标签的位置信息及相对位置信息,确定目标点的位置信息。
13.在一个实施方式中,位置信息包括第一坐标方向的第一坐标信息以及第二坐标方向的第二坐标信息;
14.根据至少两个定位标签中任意两个定位标签分别对应的位置信息,确定运输车的车头朝向,包括:
15.确定第一关系,第一关系为任意两个定位标签分别对应的第一坐标信息之间的大小关系;
16.确定第二关系,第二关系为任意两个定位标签分别对应的第二坐标信息之间的大
小关系;
17.确定第三关系,第三关系包括:第一绝对值信息与预设阈值之间的关系以及第二绝对值信息与预设阈值之间的关系;
18.其中,第一绝对值信息包括:任意两个定位标签分别对应的第一坐标信息之间差值的绝对值;第二绝对值信息包括:任意两个定位标签分别对应的第二坐标信息之间差值的绝对值;
19.基于第一关系、第二关系及第三关系,确定运输车的车头朝向。
20.在一个实施方式中,基于第一关系、第二关系及第三关系,确定叉车的车头朝向,包括:
21.若x2>x1,x2-x1>l且|y1-y2|≤l,则确定运输车的车头方向与第一坐标方向的正方向相反;
22.若y1>y2,|x2-x1|≤l且y1-y2>l,则确定运输车的车头方向与第二坐标方向的正方向相同;
23.若x1>x2,x1-x2>l且|y2-y1|≤l,则确定运输车的车头方向与第一坐标方向的正方向相同;
24.若y2>y1,|x1-x2|≤l且y2-y1>l,则确定运输车的车头方向与第二坐标方向的正方相反;
25.其中,(x1,y1)以及(x2,y2)为任意两个定位标签分别对应的位置信息,x1以及x3为任意两个定位标签分别对应的第一坐标信息,y1以及y2为任意两个定位标签分别对应的第二坐标信息,l为预设阈值。
26.在一个实施方式中,根据车头朝向、其中至少一个定位标签的位置信息及相对位置信息,确定目标点的位置信息,包括以下任一项:
27.基于车头朝向、至少一个定位标签与目标点的相对位置信息中任一定位标签与目标点的相对位置信息以及任一定位标签的位置信息确定目标点的预估位置信息,并将目标点的预估位置信息确定为目标点的位置信息;
28.基于车头朝向、至少两个定位标签分别与目标点的相对位置信息以及各自对应的位置信息,分别确定目标点分别对应的预估位置信息,基于目标点分别对应的预估位置信息确定目标点的位置信息。
29.在一个实施方式中,若运输车为叉车,则基于车头朝向,任一定位标签与目标点的相对位置信息以及该定位标签的位置信息确定目标点对应的预估位置信息,包括:
30.将该定位标签的位置信息向车头朝向方向平移任一定位标签与目标点的相对位置信息;
31.将平移后的位置信息确定为目标点对应的预估位置信息。
32.在一个实施方式中,将该定位标签的位置信息向车头朝向方向平移任一定位标签与目标点的相对位置信息;将平移后的位置信息确定为目标点对应的预估位置信息,包括:
33.若叉车的车头朝向与第一坐标方向轴的正方向相反,则按照如下公式计算得到目标点对应的预估位置信息,
34.35.若叉车的车头方向与第二坐标方向轴的正方向相同,则按照如下公式计算得到目标点对应的预估位置信息,
[0036][0037]
若叉车的车头方向与第一坐标方向轴的正方向相同,则按照如下公式计算得到目标点对应的预估位置信息,
[0038][0039]
若叉车的车头方向与第二坐标方向轴的正方相反,则按照如下公式计算得到目标点的对应的预估位置信息,
[0040][0041]
其中,(x3,y3)为目标点对应的预估位置信息,(xk,yk)为定位标签k的位置信息,k=1、2
……
、n,n为定位标签的总数,d为定位标签k与叉车运送的目标点的相对位置信息,定位标签k为任一定位标签。
[0042]
在一个实施方式中,当至少两个定位标签分别对应的定位误差均相同时,预设阈值不小于定位误差的2倍,相邻两个定位标签的中心距离大于定位误差的4倍;
[0043]
当至少两个定位标签分别对应的定位误差不均相同时,预设阈值不小于最大定位误差的2倍,相邻两个定位标签的中心距离大于最大定位误差的4倍;
[0044]
其中,最大定位误差为至少两个定位标签分别对应的定位误差中最大的定位误差。
[0045]
在一个实施方式中,若运输车设有读写器,载货部设有电子标签,方法还包括:
[0046]
当读写器首次读取电子标签的标签信息时,将运输车信息与标签信息匹配的货物信息进行绑定;
[0047]
当读写器再次读取电子标签的标签信息时,将运输车信息与标签信息匹配的货物信息进行解绑;
[0048]
将载货部所载货物在解绑时的位置信息确定为货物的存放位置信息;
[0049]
基于货物的存放位置信息以及各个货位分别对应的货位信息,确定货物所存放的货位的货位信息。
[0050]
在一个实施方式中,基于货物的存放位置信息以及各个货位分别对应的货位信息,确定货物所存放的货位,之后还包括:
[0051]
基于货物所存放的货位的货位信息,更新已存储的货物信息与货位信息之间的关联关系;
[0052]
当检测到查询请求时,基于查询请求中携带的货物信息以及货物信息与货位信息之间的关联关系,查找到货物信息所对应的货位信息。
[0053]
在一个实施方式中,基于货物的存放位置信息以及各个货位分别对应的货位信息,确定货物所存放的货位的货位信息,之后还包括:
[0054]
在电子地图上对应位置处显示货物的货物信息及货物所在的货位信息,对应位置为货物所在货位在电子地图上所对应的位置。
[0055]
依据本技术另一个方面,提供了一种货物的定位装置,包括:
[0056]
获取模块,用于获取设置在运输车上的至少两个定位标签的位置信息及其中至少一个定位标签与目标点的相对位置信息,至少两个定位标签中各个定位标签的中心位于同一直线上,目标点位于直线上;
[0057]
目标点位置信息确定模块,根据至少两个定位标签的位置信息及相对位置信息,确定目标点的位置信息
[0058]
货物位置信息确定模块,将目标点的位置信息确定为运输车所载货物的位置信息。
[0059]
在一个实施方式中,目标点在运输车运载的载货部的承载面上的垂直投射点为承载面的中心点。
[0060]
在一个实施方式中,目标点位置信息确定模块包括:
[0061]
车头朝向确定单元,用于根据至少两个定位标签中任意两个定位标签分别对应的位置信息,确定叉车的车头朝向;
[0062]
目标点位置信息确定单元,用于根据车头朝向、其中至少一个定位标签的位置信息及相对位置信息,确定目标点的位置信息。
[0063]
在一个实施方式中,位置信息包括第一坐标方向的第一坐标信息以及第二坐标方向的第二坐标信息;
[0064]
车头朝向确定单元包括:
[0065]
第一关系确定子单元,用于确定第一关系,第一关系为任意两个定位标签分别对应的第一坐标信息之间的大小关系;
[0066]
第二关系确定子单元,用于确定第二关系,第二关系为任意两个定位标签分别对应的第二坐标信息之间的大小关系;
[0067]
第三关系确定子单元,用于确定第三关系,第三关系包括:第一绝对值信息与预设阈值之间的关系以及第二绝对值信息与预设阈值之间的关系;
[0068]
其中,第一绝对值信息包括:任意两个定位标签分别对应的第一坐标信息之间差值的绝对值;第二绝对值信息包括:任意两个定位标签分别对应的第二坐标信息之间差值的绝对值;
[0069]
朝向判定子单元,用于基于第一关系、第二关系及第三关系,确定叉车的车头朝向。
[0070]
在一个实施方式中,朝向判定子单元,具体用于当x2>x1,x2-x1>l且|y1-y2|≤l时,确定叉车的车头方向与第一坐标方向的正方向相反;
[0071]
当y1>y2,|x2-x1|≤l且y1-y2>l时,确定运输车的车头方向与第二坐标方向的正方向相同;
[0072]
当x1>x2,x1-x2>l且|y2-y1|≤l时,确定运输车的车头方向与第一坐标方向的正方向相同;
[0073]
当y2>y1,|x1-x2|≤l且y2-y1>l时,确定运输车的车头方向与第二坐标方向的正方相反;
[0074]
其中,(x1,y1)以及(x2,y2)为任意两个定位标签分别对应的位置信息,x1以及x2为任意两个定位标签分别对应的第一坐标信息,y1以及y2为任意两个定位标签分别对应的第
二坐标信息,l为预设阈值。
[0075]
在一个实施方式中,目标点位置信息确定单元,具体用于以下任一项:
[0076]
基于车头朝向、至少一个定位标签与目标点的相对位置信息中任一定位标签与目标点的相对位置信息以及任一定位标签的位置信息确定目标点的预估位置信息,并将目标点的预估位置信息确定为目标点的位置信息;
[0077]
基于车头朝向、至少两个定位标签分别与目标点的相对位置信息以及各自对应的位置信息,分别确定目标点分别对应的预估位置信息,基于目标点分别对应的预估位置信息确定目标点的位置信息。
[0078]
在一个实施方式中,当运输车为叉车时,目标点位置信息确定单元,具体还用于:
[0079]
将该定位标签的位置信息向车头朝向方向平移任一定位标签与叉车运送的目标点的相对位置信息;
[0080]
将平移后的位置信息确定为目标点对应的预估位置信息。
[0081]
在一个实施方式中,目标点位置信息确定单元,还具体用于当叉车的车头朝向与第一坐标方向轴的正方向相反时,按照如下公式计算得到目标点对应的预估位置信息,
[0082][0083]
当叉车的车头方向与第二坐标方向轴的正方向相同时,按照如下公式计算得到目标点对应的预估位置信息,
[0084][0085]
当叉车的车头方向与第一坐标方向轴的正方向相同时,按照如下公式计算得到目标点对应的预估位置信息,
[0086][0087]
当叉车的车头方向与第二坐标方向轴的正方相反时,按照如下公式计算得到目标点的对应的预估位置信息,
[0088][0089]
其中,(x3,y3)为目标点对应的预估位置信息,(xk,yk)为定位标签k的位置信息,k=1、2
……
、n,n为定位标签的总数,d为定位标签k与叉车运送的目标点的相对位置信息,定位标签k为任一定位标签。。
[0090]
在一个实施方式中,当至少两个定位标签分别对应的定位误差均相同时,预设阈值不小于定位误差的2倍,相邻两个定位标签的中心距离大于定位误差的4倍;
[0091]
当至少两个定位标签分别对应的定位误差不均相同时,预设阈值不小于最大定位误差的2倍,相邻两个定位标签的中心距离大于最大定位误差的4倍;
[0092]
其中,最大定位误差为至少两个定位标签分别对应的定位误差中最大的定位误差。
[0093]
在一个实施方式中,当运输车设有读写器,载货部设有电子标签时,装置还包括:
[0094]
绑定模块,用于当读写器首次读取电子标签的标签信息时,将运输车信息与标签信息匹配的货物信息进行绑定;
[0095]
解绑模块,用于当读写器再次读取电子标签的标签信息时,将运输车信息与标签信息匹配的货物信息进行解绑;
[0096]
货物存放位置信息确定模块,用于将载货部所载货物在解绑时的位置信息确定为货物的存放位置信息;
[0097]
货位信息确定模块,用于基于货物的存放位置信息以及各个货位分别对应的货位信息,确定货物所存放的货位的货位信息。
[0098]
在一个实施方式中,装置还包括:
[0099]
更新模块,用于基于货物所存放的货位的货位信息,更新已存储的货物信息与货位信息之间的关联关系;
[0100]
查找模块,用于当检测到查询请求时,基于查询请求中携带的货物信息以及货物信息与货位信息之间的关联关系,查找到货物信息所对应的货位信息。
[0101]
在一个实施方式中,装置还包括:
[0102]
电子地图显示模块,用于在电子地图上对应位置处显示货物的货物信息及货物所在的货位信息,对应位置为货物所在货位在电子地图上所对应的位置。
[0103]
根据本技术的又一方面,提供了一种货物的定位系统,包括处理器、设置在运输车上的至少两个定位标签,至少两个定位标签中各个定位标签的中心位于同一直线上;
[0104]
定位标签,用于定位;
[0105]
处理器,用于获取至少两个定位标签的位置信息及其中至少一个定位标签与目标点的相对位置信息,目标点位于直线上;
[0106]
根据至少两个定位标签的位置信息及相对位置信息,确定目标点的位置信息;
[0107]
将目标点的位置信息确定为运输车所载货物的位置信息。
[0108]
根据本技术的又一方面,提供了一种存储介质,存储介质中存储有至少一可执行指令,可执行指令使处理器执行如上述货物的定位方法。
[0109]
根据本技术的又一方面,提供了一种电子设备,包括:处理器、存储器、通信接口和通信总线,处理器、存储器和通信接口通过通信总线完成相互间的通信;
[0110]
存储器用于存放至少一可执行指令,可执行指令使处理器执行如上述货物的定位方法。
[0111]
借由上述技术方案,本技术实施例提供的技术方案至少具有下列优点:
[0112]
本技术提供了一种货物的定位方法、装置、系统、存储介质及电子设备,与现有技术对货物直接定位相比,本技术通过获取设置在运输车上的至少两个定位标签的位置信息及其中至少一个定位标签与目标点的相对位置信息,然后基于至少两个定位标签中各个定位标签的中心位于同一直线上,且目标点为位于该直线上,通过至少两个定位标签的位置信息及相对位置信息,得到目标点的位置信息,并将目标点的位置信息确定为所述运输车所载货物的位置信息,也即在本技术中不需要在货物上设置定位标签,而是通过设置在运输车上的至少两个定位标签的位置信息确定所述运输车所载货物的位置信息,这样可避免由于货物堆叠或密度较大,使货物上的定位标签信号被严重遮挡,造成定位误差较大,甚至信号丢失的情况发生。
附图说明
[0113]
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本技术的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
[0114]
图1示出了本技术一实施例提供的货物的定位方法流程图;
[0115]
图2示出了本技术一实施例中的定位标签、载货部及目标点的位置关系图;
[0116]
图3示出了本技术一实施例中的定位标签及载货部位置关系图;
[0117]
图4示出了本技术一实施例中的定位标签、载货部、读写器与目标点的位置关系图;
[0118]
图5示出了本技术另一实施例提供的货物的定位方法流程图;
[0119]
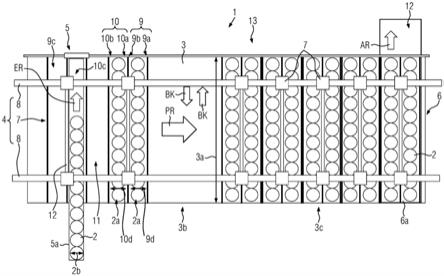
图6示出了本技术另一实施例实施的场景图;
[0120]
图7为两个定位标签的误差区域重叠的示意图;
[0121]
图8示出了本技术一实施例中两个定位标签的误差区域相切的示意图;
[0122]
图9示出了本技术一实施例中两个定位标签的位置关系图;
[0123]
图10示出了本技术另一实施例中两个定位标签的误差区域相切的示意图;
[0124]
图11示出了本技术又一实施例提供的货物的定位方法流程图;
[0125]
图12示出了本技术一实施例提供的一种货物的定位装置组成框图;
[0126]
图13示出了本技术一实施例提供的一种电子设备的结构示意图。
具体实施方式
[0127]
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
[0128]
本技术实施例提供了一种货物的定位方法,如图1所示,该方法可以由电子设备执行,该电子设备可以为终端设备,如手机或笔记本电脑等,也可以为服务器,该方法包括:
[0129]
步骤s101:获取设置在运输车上的至少两个定位标签的位置信息及其中至少一个定位标签与目标点的相对位置信息。其中,至少两个定位标签中各个定位标签的中心位于同一直线上,目标点位于直线上。
[0130]
对于本技术实施例,运输车上设置有载货部,载货部可为能够装载货物的托板或容器装置,例如,叉盘或集装箱等。在本技术实施例中,将目标点的位置确定为运输车上承载的货物的位置。
[0131]
对于本技术实施例,设置在运输车上的定位标签的数量可以为两个,也可以多于两个,在本技术实施例中,各个定位标签分别对应的中心与目标点处于同一条直线上。
[0132]
本技术实施例中的一种可能的实现方式,目标点可以为预先设置。
[0133]
具体地,在本技术实施例中,目标点在运输车运载的载货部的承载面上的垂直投射点为承载面的中心点。也就是说,各个定位标签所在平面与过载货部中心点且垂直于载货部平面的直线之间的交点即为目标点。也即在确定目标点之后,基于目标点和各个定位标签的各个中心点之间位于同一直线上这一关系,设置各个定位标签。
[0134]
例如,如图2所示,以叉车为例,定位标签4一般可以设置在叉车1的车顶,也即目标点g为垂直于载货部2且过载货部2中心点f的直线于车顶所在平面s之间的交点。在叉车运输货物3时,目标点g通常也与货物3的中心点重合。f为载货部的中心点,由于图2为二维平面图,也即图2中f点仅是示意性的。
[0135]
对于本技术实施例,由于定位标签的设置与目标点的相关,但是目标点的确定与载货部的中心点的位置相关,载货部的类型不同,中心点位置也不相同,进而定位标签的位置也不同,因此可以预先确定各种类型的载货部的中心点位置,进而确定各种类型的载货部所对应的定位标签的位置信息,例如,如图3所示,以叉车为例,预先确定载货部2的中心点f的位置,进而利用中心点f所在的垂直方向的直线n2与叉车1的车顶所在平面上能够与直线n2相交且垂直于直线n2的直线n1,直线n1通常与车顶的中轴线重合,从而可确定将定位标签4设置在直线n1上。在本技术实施例中,所涉及到的载货部的中心点位置为该载货部承载至运输车时所对应的中心点位置。例如,所涉及的载货部的中心点位置为叉车插入载货部之后所对应的载货部的中心点位置。
[0136]
在本实施例中,运输车上的至少两个定位标签的位置信息的获取方式可采用通过设置在仓库内的多个uwb(ultra wideband,超宽带)基站,采用tdoa(time difference of arrivial,到达时间差)定位算法、aoa(angle of arrival,到达角定位)算法或tof(time of flight,飞行时间定位)算法等来实现定位标签的位置信息的测算,其中,uwb基站部署在仓库顶部的天花板上,使uwb基站的信号覆盖所在仓库,既节省空间又达到减小信号干扰的目的,当然,也可采用其他现有方式获取定位标签的位置信息,例如蓝牙定位等,本实施例不做严格限定。
[0137]
在本实施例中,一个定位标签与目标点的相对位置信息具体为该定位标签的中心与目标点之间的直线距离。
[0138]
具体地,任一定位标签与目标点的相对位置信息可以为预先测量得到的,也可以通过下述公式(1)进行计算得到的。在本技术实施例中,任意可以得到定位标签与目标点的相对位置信息的方式均在本技术保护范围之内,并不做限定。
[0139][0140]
其中,d为任一定位标签与目标点相对位置信息,b1为载货部的宽度,b2为该任一标签与读写器之间水平距离,b3为读卡器到载货部长边之间的距离。具体地,如图4所示,定位标签a与目标点g之间相对位置信息为d,载货部2的宽度为b1,定位标签a与读写器5之间的水平距离为b2,读卡器5到载货部长边m之间的距离为b3。
[0141]
步骤s102:根据至少两个定位标签的位置信息及相对位置信息,确定目标点的位置信息。
[0142]
步骤s103:将目标点的位置信息确定为运输车所载货物的位置信息。
[0143]
本实施例提供的货物的定位方法,与现有技术对货物直接定位相比,本实施例通过获取设置在运输车上的至少两个定位标签的位置信息及其中至少一个定位标签与目标点的相对位置信息,然后基于至少两个定位标签中各个定位标签的中心位于同一直线上,且目标点为位于该直线上,通过至少两个定位标签的位置信息及相对位置信息,得到目标点的位置信息,并将目标点的位置信息确定为运输车所载货物的位置信息,也即在本技术
中不需要在货物上设置定位标签,而是通过设置在运输车上的至少两个定位标签的位置信息确定运输车所载货物的位置信息,这样可避免由于货物堆叠或密度较大,使货物上的定位标签信号被严重遮挡,造成定位误差较大,甚至信号丢失的情况发生。
[0144]
进一步地,作为上述实施例具体实施方式的细化和扩展,在本技术的另一实施例中,为了完整说明本实施例的实施过程,提供了货物的定位方法,如图5所示,该方法具体包括以下步骤:
[0145]
步骤s501:获取设置在运输车上的至少两个定位标签的位置信息及其中至少一个定位标签与目标点的相对位置信息。其中,至少两个定位标签中各个定位标签的中心位于同一直线上,目标点位于直线上。
[0146]
对于本技术实施例,位置信息包括第一坐标方向的第一坐标信息以及第二坐标方向的第二坐标信息。其中,第一坐标方向与第二坐标方向分别为在仓库坐标系下的两个坐标方向。具体地,在仓库中建立xy坐标系,xy坐标系即为仓库坐标系,第一坐标方向为x轴所在方向,第二坐标方向为y轴所在方向,第一坐标方向的正方向为x轴的箭头所指方向,第二坐标方向的正方向为y轴的箭头所指方向。在本实施例中,可将东向设置为x轴的箭头所指方向,可将北向设置为y轴的箭头所指方向,当然,还可以将其他方向设置为x轴和y轴的箭头所指方向,本实施例不做严格限定。第一坐标信息为在xy坐标系中对应于x轴的值,第二坐标信息为在xy坐标系中对应于y轴的值。
[0147]
步骤s502:根据至少两个定位标签中任意两个定位标签分别对应的位置信息,确定运输车的车头朝向。
[0148]
至少两个定位标签中任意两个定位标签即为在所有定位标签中任意选定两个,也就是说选取的两个定位标签可以是相邻的两个定位标签,也可是不相邻的两个定位标签。具体地,在一种示例性的应用场景中,如图6所示,叉车上由车头至车尾方向依次设置有定位标签a、定位标签b、定位标签c,在这三个定位标签中选取任意两个标签,即可选取定位标签a和定位标签b、定位标签a和定位标签c、或者定位标签b和定位标签c。
[0149]
在一种可能的实现方式中,步骤s502具体可以包括如下步骤:
[0150]
步骤s5021(图中未示出):确定第一关系,第一关系为任意两个定位标签分别对应的第一坐标信息之间的大小关系。
[0151]
例如,在图6所示的场景中,以选取定位标签a和定位标签b为例,假设定位标签a的位置信息为(10,15),定位标签b的位置信息为(9,8),这样定位标签a的第一坐标信息为10,定位标签b的第一坐标信息为9,定位标签a的第一坐标信息10大于第二定位标签b的第一坐标信息9,从而确定第一关系。
[0152]
步骤s5022(图中未示出):确定第二关系,第二关系为任意两个定位标签分别对应的第二坐标信息之间的大小关系。
[0153]
继续采用上例,定位标签a的第二坐标信息为15,定位标签b的第二坐标信息为8,定位标签a的第二坐标信息15大于定位标签b的第二坐标信息8,从而确定第二关系。
[0154]
步骤s5023(图中未示出):确定第三关系,第三关系包括:第一绝对值信息与预设阈值之间的关系以及第二绝对值信息与预设阈值之间的关系。
[0155]
其中,第一绝对值信息包括:任意两个定位标签分别对应的第一坐标信息之间差值的绝对值;第二绝对值信息包括:任意两个定位标签分别对应的第二坐标信息之间差值
的绝对值。
[0156]
继续采用上例,假设预设阈值为4,定位标签a和定位标签b分别对应的第一坐标信息之间差值的绝对值为1,即第一绝对值信息为1;定位标签a和定位标签b分别对应的第二坐标信息之间差值的绝对值为7,即第二绝对值信息为7,第一绝对值信息1小于预设阈值4,且第二绝对值信息7大于预设阈值4,从而确定第三关系。在本技术实施例中,步骤s5021、步骤s5022以及步骤s5023可以同时执行,也可以不同时执行,其中,在步骤s5021、步骤s5022以及步骤s5023不同时执行时,其三者的执行顺序并不进行限定,任何可能的执行顺序均在本技术保护范围之内。
[0157]
由于定位标签均会存在一定的定位误差,基于每个定位标签所得到的位置信息不一定是定位标签的中心的位置信息,而可能会落入以该定位标签的中心为中心,定位误差为半径所围成的误差区域内,因此,相邻的两个定位标签分别由各自定位误差所围成的误差区域不能重合,以保证两个定位标签所确定的位置信息不同,避免如图7所示的两个定位标签所得到的位置信息f相同,则后续无法确定出运输车的车头朝向的问题,提高了确定运输车的车头朝向的准确性。
[0158]
而由于所用的定位标签不一定会采用同批次的产品,这样所有定位标签的定位误差可能全部相同,也可能至少其中的一个定位标签与其他定位标签的定位误差不同。
[0159]
当至少两个定位标签分别对应的定位误差均相同时,预设阈值不小于定位误差的2倍,相邻两个定位标签的中心距离大于定位误差的4倍。具体地,在叉车上所有定位标签的定位误差相同的情况下,为了保证相邻的两个定位标签分别由各自定位误差所围成的误差区域不能重合,就要保证一个定位标签的误差区域的任一点与相邻的定位标签的误差区域的任一点之间的第一绝对值信息大于两个区域相切时,切点与误差区域的点之间最第一坐标信息差值的最大值,即定位误差的2倍,也就是相邻两个定位标签的中心距离大于定位误差的4倍。以定位标签a和定位标签b,定位误差为r为例,为了保证定位标签a与定位标签b分别由各自定位误差所围成的误差区域不能重合,则要保证定位标签a的定位误差围成的误差区域的任意一点和定位标签b的误差区域的任意一点之间第一绝对值大于如图8所示的两个区域相切时,切点p与点a1或点b1之间的第一坐标信息的差值,即2r,也就是定位标签a的中心o1和定位标签b的中心o2之间的距离大于4r,具体如图9所示。而基于一个定位标签的误差区的任一点与相邻的定位标签的误差区域的任一点之间的第一绝对值大于定位误差的2倍,预设阈值要不小于定位误差的2倍。
[0160]
当至少两个定位标签分别对应的定位误差不均相同时,预设阈值不小于最大定位误差的2倍,相邻两个定位标签的中心距离大于最大定位误差的4倍;其中,最大定位误差为至少两个定位标签分别对应的定位误差中最大的定位误差。在运输车上至少两个定位标签分别对应的定位误差不均相同的情况下,为了保证相邻的两个定位标签分别由各自定位误差所围成的误差区域不能重合,就要保证一个定位标签的误差区域的任一点与相邻的定位标签的误差区域的任一点之间的第一绝对值大于两个区域相切时,切点与误差区域上的点之间第一坐标信息差值的最大值,即最大定位误差的2倍,这样将相邻两个定位标签的中心距离设置为大于最大定位误差的4倍。以定位标签a和定位标签b,定位标签a的定位误差为r1,定位标签b的定位误差为r2,且r1>r2为例,为了保证定位标签a与定位标签b分别由各自的误差区域不能重合,则要保证定位标签a的误差区域上任意一点和定位标签b的误差区域
的任意一点之间的第一绝对值信息大于如图10所示的两个区域相切时,切点p与点a2之间的第一坐标信息的差值,即2r1;这样定位标签a的中心o1和定位标签b的中心o2之间的距离大于4r1。而基于一个定位标签的误差区域的任一点与相邻的定位标签的误差区域的任一点之间的绝对值信息大于最大定位误差的2倍,预设阈值要不小于最大定位误差的2倍。
[0161]
步骤s5024(图中未示出):基于第一关系、第二关系及第三关系,确定运输车的车头朝向。
[0162]
具体地,若x2>x1,x2-x1>l且|y1-y2|≤l,则确定运输车的车头方向与第一坐标方向的正方向相反;
[0163]
若y1>y2,|x2-x1|≤l且y1-y2>l,则确定运输车的车头方向与第二坐标方向的正方向相同;
[0164]
若x1>x2,x1-x2>l且|y2-y1|≤l,则确定运输车的车头方向与第一坐标方向的正方向相同;
[0165]
若y2>y1,|x1-x2|≤l且y2-y1>l,则确定运输车的车头方向与第二坐标方向的正方向相反;
[0166]
其中,(x1,y1)以及(x2,y2)为任意两个定位标签分别对应的位置信息,x1以及x3为任意两个定位标签分别对应的第一坐标信息,y1以及y2为任意两个定位标签分别对应的第二坐标信息,l为预设阈值。
[0167]
继续以采用上例,选取定位标签a和定位标签b,定位标签a的位置信息(x1,y1)为(10,15),定位标签b的位置信息(x2,y2)为(9,8),如果预设阈值l为4,第一坐标方向为xy坐标系中x轴所在方向,第二坐标方向为xy坐标系中y轴所在方向,第一坐标方向的正方向为x轴的箭头所指方向,第二坐标的正方向为y轴的箭头所指方向,并且将东向设置为x轴的箭头所指方向,将北向设置为y轴的箭头所指方向,第一坐标信息为在xy坐标系中对应于x轴的值,第二坐标信息为在xy坐标系中对应于y轴的值,这样通过上述判断条件,满足y2>y1,|x1-x2|≤l且y2-y1>l,则确定运输车的车头方向与y轴的箭头所指方向相同,即为车头朝向北。其他选取定位标签的组合和比较方式可采用上述示例出的方式,本实施例不再赘述。
[0168]
步骤s503:根据车头朝向,其中至少一个定位标签的位置信息及相对位置信息,确定目标点的位置信息,并将目标点的位置信息确定为运输车所载货物的位置信息。
[0169]
其中,至少一个定位标签的位置信息及相对位置信息可以是所有标签中的任一个定位标签的位置信息及相对位置信息,也可是所有定位标签中至少两个定位标签的位置信息及各自相应的相对位置信息,也可以是所有定位标签的位置信息及各自相应的相对信息,例如,如图6所示,在叉车设置有定位标签a、定位标签b和定位标签c,其中至少一个定位标签的位置信息及相对位置信息可以是其中一个定位标签的位置信息及该定位标签与目标点之间的相对位置信息,如定位标签a的位置信息及定位标签a与目标点之间的相对位置信息,也可以是其中的任意两个定位标签的位置信息及各自相应的相对位置信息,如定位标签a的位置信息及定位标签a与目标点之间的相对位置信息和定位标签b的位置信息及定位标签b与目标点之间的相对位置信息,也可以是所有的定位标签,即定位标签a的位置信息及定位标签a与目标点之间的相对位置信息、定位标签b的位置信息及定位标签b与目标点之间的相对位置信息和定位标签c的位置信息及定位标签c与目标点之间的相对位置信息。
[0170]
在一个可选的实施方式中,根据车头朝向,其中至少一个定位标签的位置信息及相对位置信息,确定目标点的位置信息,具体可以包括:基于车头朝向、至少一个定位标签与目标点的相对位置信息中任一定位标签与目标点的相对位置信息以及任一定位标签的位置信息确定目标点的预估位置信息,并将目标点的预估位置信息确定为目标点的位置信息。
[0171]
进一步地,将上述确定出的目标点的位置信息确定为运输车所在货物的位置信息。
[0172]
对于本技术实施例,任一定位标签与目标点的相对位置信息以及任一定位标签的位置信息中所涉及的任一定位标签为同一定位标签。
[0173]
继续采用上例,至少一个定位标签与目标点的相对位置信息中任一定位标签与目标点的相对位置信息以及任一定位标签的位置信息为定位标签a与目标点之间的相对位置信息及定位标签a的位置信息,或者定位标签b与目标点之间的相对位置信息及定位标签b的位置信息,或者定位标签c与目标点之间的相对位置信息及定位标签c的位置信息。
[0174]
本技术实施例的一种可能的实现方式,基于车头朝向、至少一个定位标签与目标点的相对位置信息中任一定位标签与目标点的相对位置信息以及任一定位标签的位置信息确定目标点的预估位置信息,具体可以包括:若运输车的载货部的设置的方向与车头朝向相反,则将该定位标签的位置信息向与车头朝向相反的方向并按照该定位标签与目标点的相对位置信息平移;并将平移后的位置信息作为目标点的预估位置信息。
[0175]
本技术实施例的另一种可能的实现方式,若运输车为叉车,则基于车头朝向、至少一个定位标签与目标点的相对位置信息中任一定位标签与目标点的相对位置信息以及任一定位标签的位置信息确定目标点的预估位置信息,具体可以包括如下:
[0176]
步骤一:将该定位标签的位置信息向车头朝向方向平移任一定位标签与目标点的相对位置信息。
[0177]
步骤二:将平移后的位置信息确定为目标点对应的预估位置信息。
[0178]
具体地,若叉车的车头朝向与第一坐标方向轴的正方向相反,则按照如下公式计算得到目标点对应的预估位置信息,
[0179][0180]
若叉车的车头方向与第二坐标方向轴的正方向相同,则按照如下公式计算得到目标点对应的预估位置信息,
[0181][0182]
若叉车的车头方向与第一坐标方向轴的正方向相同,则按照如下公式计算得到目标点对应的预估位置信息,
[0183][0184]
若叉车的车头方向与第二坐标方向轴的正方相反,则按照如下公式计算得到目标点的对应的预估位置信息,
[0185][0186]
其中,(x3,y3)为目标点对应的预估位置信息,(xk,yk)为定位标签k的位置信息,k=1、2
……
、n,n为定位标签的总数,d为定位标签k与目标点的相对位置信息,定位标签k为任一定位标签。
[0187]
进一步地,在上述实施例确定出目标点的位置信息,从而得到叉车运输的货物的位置信息,也即叉车运输的货物的位置信息为上述确定出的目标点的位置信息。
[0188]
继续以采用上例,选取定位标签a和定位标签b,定位标签a的位置信息为(10,15),定位标签b的位置信息为(9,8),预设阈值l为4,第一坐标方向为xy坐标系中x轴所在方向,第二坐标方向为xy坐标系中y轴所在方向,第一坐标方向的正方向为x轴的箭头所指方向,第二坐标的正方向为y轴的箭头所指方向,并且将东向设置为x轴的箭头所指方向,将北向设置为y轴的箭头所指方向,第一坐标信息为在xy坐标系中对应于x轴的值,第二坐标信息为在xy坐标系中对应于y轴的值,这样确定叉车的车头方向与y轴的箭头所指方向相同,即为车头朝向北,然后在定位标签a、定位标签b和定位标签c中选取任意一个定位标签,以选取定位标签a,定位标签a与目标点的相应的相对位置信息d为5为例,根据车头朝向及如下对应的公式,
[0189][0190]
目标点对应的预估位置信息x3=10,y3=15 5=20,则目标点对应的预估位置信息(10,20)。
[0191]
在本实现方式中,通过车头的朝向,将其中的一个定位标签的位置信息沿车头的朝向方向平移相应的相对位置信息,则可得到目标点的位置信息,不仅避免了繁琐的定位算法,而且也保证了货物的定位准确。
[0192]
在另一个可选的实施方式中,根据车头朝向,其中至少一个定位标签的位置信息及相对位置信息,确定目标点的位置信息,具体可以包括:基于车头朝向、至少两个定位标签分别与目标点的相对位置信息以及各自对应的位置信息,分别确定目标点分别对应的预估位置信息,基于目标点分别对应的预估位置信息确定目标点的位置信息。
[0193]
进一步地,在确定目标点的位置信息后,将目标点的位置信息确定为货物的位置信息。
[0194]
对于本技术实施例,基于车头朝向、任一定位标签与目标点的相对位置信息以及该定位标签的位置信息,确定目标点对应的预估位置信息的计算方式详见上文中记载的目标点对应的预估位置信息的确定方式,在此不在赘述。
[0195]
继续采用上例,以选取在定位标签a、定位标签b和定位标签c中选取任意两个定位标签为例,具体选取定位标签a和定位标签b,定位标签a的位置信息为(10,15),定位标签b的位置信息为(9,8),假设定位标签a与目标点的相对位置信息为5,定位标签b与目标点的相对位置信息为10,则根据上述公式,分别得到通过定位标签a所确定的预估位置信息为(10,20),通过定位标签b所确定的预估位置信息为(9,18),然后将两个预估的位置信息的第一坐标信息和第二坐标信息分别取得平均值为(9.5,19),将平均值确定为目标点的位置信息,这样利用多个预估位置信息进行求和平均的方式,进一步对目标点的位置信息进行
修正,提高定位的准确性。在本技术实施例中,在基于目标点分别对应的预估位置信息确定目标点的位置信息时,并不限于求平均值的方式,任意基于目标点分别对应的预估位置信息确定目标点的位置信息的方式均在本技术实施例的保护范围之内。
[0196]
进一步地,作为上述实施例具体实施方式的细化和扩展,在本技术的另一实施例中,运输车上设有读写器,载货部设有电子标签,如图11所示,该方法具体还包括以下步骤:
[0197]
步骤s1101:当读写器首次读取电子标签的标签信息时,将运输车信息与标签信息匹配的货物信息进行绑定。
[0198]
其中,货物信息包括但不限于货物的名称及入库时间等,叉车信息包括但不限于叉车的编号及叉车的型号等。
[0199]
对于本技术实施例,载货部上承载有货物,当运输车辆装载货物时,运输车上设置的读写器首次读取该载货部设置的电子标签,以实现将运输车辆与标签信息匹配的货物信息进行绑定。
[0200]
本技术实施例的一种可能的实现方式,若该运输车为叉车,读写器可设置在叉车货叉的上表面,电子标签可设置在载货部的轨道上,这样在货叉插入轨道内的过程中,读写器与电子标签接触后,可读取电子标签的标签信息,标签信息为载货部的id号,每个载货部的id号与其当前所载货物的货物信息相匹配;并且在读写器读取到电子标签的标签信息时,将叉车信息与标签信息匹配的货物信息进行绑定,这样,工作人员可掌握每个叉车的使用情况及每个处于运输状态的叉车所运送的货物,便于对叉车调度,提高工作人员的工作效率。
[0201]
步骤s1102:当读写器再次读取电子标签的标签信息时,将运输车信息与标签信息匹配的货物信息进行解绑。
[0202]
对于本技术实施例,当该运输车卸载该货物时,设置上运输车上的读写器与载货物上的电子标签重合,从而再次读取到该电子标签的标签信息,此时,可以将运输车信息与标签信息匹配的货物信息进行解绑。
[0203]
以叉车为例,在叉车将货物运送至指定的货位后,叉车的货叉从载货部的轨道内抽出,在抽出的过程中,读写器与电子标签再次接触后,可再次读取电子标签的标签信息,并在读写器再次读取到电子标签的标签信息时,将叉车信息与标签信息匹配的货物信息进行解绑,这样叉车在运送任务完成后,使叉车与相应运输货物之间自动解除对应关系,无需人工操作,降低工作人员的工作量。
[0204]
步骤s1103:将载货部所载货物在解绑时的位置信息确定为货物的存放位置信息。
[0205]
步骤s1104:基于货物的存放位置信息以及各个货位分别对应的货位信息,确定货物所存放的货位的货位信息。
[0206]
各个货位的货位信息包括但不限于货位位置信息及货位的编号等。将货物的存放位置信息与货位位置信息进行比较,将距离货物的存放位置信息最近的货位的货位信息确定货物所存放的货位的货位信息,这样工作人员就可掌握每个货位所在的货位,或者每个货位所存放的货物,方便对货位的管理及对货物的查找。
[0207]
步骤s1105:基于货物所存放的货位的货位信息,更新已存储的货物信息与货位信息之间的关联关系。
[0208]
更新已存储的货物信息与货位信息之间的关联关系包括但不限于替换原有的货
物信息与货位信息之间的关联关系及新增货物信息与货位信息之间的关联关系。
[0209]
示例性的,在一示例中,在电子设备内预先存储货物a的货物信息与货位a的货位信息之间的关联关系,假设货物a已经运送出库,也就是货物a已离开货位a,然后货物b存在货位a上,就要建立货物b的货物信息与货位a的货位信息之间的关联关系,并替换之前存储的货物a的货物信息与货位a的货位信息,即更新已存储的货物信息与货位信息之间的关联关系。
[0210]
在另一示例中,货位a为空货位,即货位a的货位信息并未与已有货物的货物信息之间存在关联关系。当货位a存放了货物b时,就要新建货物b的货物信息与货位a的货位信息之间的关联关系,并将该关联关系进行存储。
[0211]
在本实施例中,更新货物信息及货位信息之间的关联关系,保证了货物信息与货位信息的对应关系的准确性。
[0212]
进一步地,步骤s1105与步骤s1101-步骤s1104没有严格的执行顺序,任何可能的执行顺序均在本技术的保护范围之内。
[0213]
步骤s1106:当检测到查询请求时,基于查询请求中携带的货物信息以及货物信息与货位信息之间的关联关系,查找到货物信息所对应的货位信息。
[0214]
利用查询请求中携带的货物信息以及货物信息与货位信息之间的关联关系,工作人员可查询到货物所在的货位,这样方便工作人员快速查找到所需货物。
[0215]
进一步地,步骤s1106与步骤s1101-步骤s1105没有严格的执行顺序,任何可能的执行顺序均在本技术的保护范围之内。
[0216]
步骤s1107:在电子地图上对应位置处显示货物的货物信息及货物所在的货位信息,对应位置为货物所在货位在电子地图上所对应的位置。
[0217]
示例性的,货物a放置在货位a上,货物a的货物信息包括货物名称a和货物a的入库时间为2012年10月11日等,货物a的重量是100kg,货位a的货位信息包括货位a的位置信息、货位a的编号5等,这样电子地图上与货位a的位置信息相对应的位置标示出货位a的货位信息(也即货物名称a和货物a的入库时间为2012年10月11日等,货物a的重量是100kg等)及货物a的货物信息(也即货位a的位置信息、货位a的编号5等)。
[0218]
其中,电子地图包括但不限于gis(geographic information system,地理信息)地图、gps(global positioning system,全球定位系统)地图等。
[0219]
在本实施例中,在电子地图上相应的位置显示各货物的货位信息及其所在的货位信息,使工作人员更加直观的查看到各个货物所在货位及其位置,并且通过电子地图,更能快速的找到各个货物所在的货位,进一步方便工作人员快速查找到所需货物及掌握各个货位的使用状况。
[0220]
进一步地,步骤s1107与步骤s1101-步骤s1106没有严格的执行顺序,任何可能的执行顺序均在本技术的保护范围之内。
[0221]
上述任一实施例的描述可以适用于各个实施例。
[0222]
进一步地,作为对上述方法的实现,本技术实施例提供了一种货物的定位装置,如图12所示,该装置包括:
[0223]
获取模块1201,用于获取设置在运输车上的至少两个定位标签的位置信息及其中至少一个定位标签与目标点的相对位置信息,至少两个定位标签中各个定位标签的中心位
于同一直线上,目标点位于直线上;
[0224]
目标点位置信息确定模块1202,用于根据至少两个定位标签的位置信息及相对位置信息,确定目标点的位置信息
[0225]
货物位置信息确定模块1203,用于将目标点的位置信息确定为运输车所载货物的位置信息。
[0226]
进一步地,目标点在运输车运载的载货部的承载面上的垂直投射点为承载面的中心点。
[0227]
在具体的应用场景中,目标点位置信息确定模块1202包括:
[0228]
车头朝向确定单元,用于根据至少两个定位标签中任意两个定位标签分别对应的位置信息,确定叉车的车头朝向;
[0229]
目标点位置信息确定单元,用于根据车头朝向、其中至少一个定位标签的位置信息及相对位置信息,确定目标点的位置信息。
[0230]
在具体的应用场景中,位置信息包括第一坐标方向的第一坐标信息以及第二坐标方向的第二坐标信息;车头朝向确定单元包括:
[0231]
第一关系确定子单元,用于确定第一关系,第一关系为任意两个定位标签分别对应的第一坐标信息之间的大小关系;
[0232]
第二关系确定子单元,用于确定第二关系,第二关系为任意两个定位标签分别对应的第二坐标信息之间的大小关系;
[0233]
第三关系确定子单元,用于确定第三关系,第三关系包括:第一绝对值信息与预设阈值之间的关系以及第二绝对值信息与预设阈值之间的关系;
[0234]
其中,第一绝对值信息包括:任意两个定位标签分别对应的第一坐标信息之间差值的绝对值;第二绝对值信息包括:任意两个定位标签分别对应的第二坐标信息之间差值的绝对值;
[0235]
朝向判定子单元,用于基于第一关系、第二关系及第三关系,确定叉车的车头朝向。
[0236]
在具体的应用场景中,朝向判定子单元,具体用于当x2>x1,x2-x1>l且|y1-y2|≤l时,确定叉车的车头方向与第一坐标方向的正方向相反;
[0237]
当y1>y2,|x2-x1|≤l且y1-y2>l时,确定运输车的车头方向与第二坐标方向的正方向相同;
[0238]
当x1>x2,x1-x2>l且|y2-y1|≤l时,确定运输车的车头方向与第一坐标方向的正方向相同;
[0239]
当y2>y1,|x1-x2|≤l且y2-y1>l时,确定运输车的车头方向与第二坐标方向的正方相反;
[0240]
其中,(x1,
y1
)以及(x2,y2)为任意两个定位标签分别对应的位置信息,x1以及x2为任意两个定位标签分别对应的第一坐标信息,y1以及y2为任意两个定位标签分别对应的第二坐标信息,l为预设阈值。
[0241]
在具体应用场景中,目标点位置信息确定单元,具体用于以下任一项:
[0242]
基于车头朝向、至少一个定位标签与目标点的相对位置信息中任一定位标签与目标点的相对位置信息以及任一定位标签的位置信息确定目标点的预估位置信息,并将目标
点的预估位置信息确定为目标点的位置信息;
[0243]
基于车头朝向、至少两个定位标签分别与目标点的相对位置信息以及各自对应的位置信息,分别确定目标点分别对应的预估位置信息,基于目标点别对应的预估位置信息确定目标点的位置信息。
[0244]
在具体应用场景中,当运输车为叉车时,目标点位置信息确定单元,具体还用于:
[0245]
将该定位标签的位置信息向车头朝向方向平移任一定位标签与叉车运送的目标点的相对位置信息;
[0246]
将平移后的位置信息确定为目标点对应的预估位置信息。
[0247]
在具体应用场景中,目标点位置信息确定单元,还具体当叉车的车头朝向与第一坐标方向轴的正方向相反时,按照如下公式计算得到目标点对应的预估位置信息,
[0248][0249]
当叉车的车头方向与第二坐标方向轴的正方向相同时,按照如下公式计算得到目标点对应的预估位置信息,
[0250][0251]
当叉车的车头方向与第一坐标方向轴的正方向相同时,按照如下公式计算得到目标点对应的预估位置信息,
[0252][0253]
当叉车的车头方向与第二坐标方向轴的正方相反时,按照如下公式计算得到目标点的对应的预估位置信息,
[0254][0255]
其中,(x3,y3)为目标点对应的预估位置信息,(xk,yk)为定位标签k的位置信息,k=1、2
……
、n,n为定位标签的总数,d为定位标签k与目标点的相对位置信息,定位标签k为任一定位标签。
[0256]
进一步地,当至少两个定位标签分别对应的定位误差均相同时,预设阈值不小于定位误差的2倍,相邻两个定位标签的中心距离大于定位误差的4倍;当至少两个定位标签分别对应的定位误差不均相同时,预设阈值不小于最大定位误差的2倍,相邻两个定位标签的中心距离大于最大定位误差的4倍;其中,最大定位误差为至少两个定位标签分别对应的定位误差中最大的定位误差。
[0257]
需要说明的是,本实施例提供的一种货物的定位装置所涉及各功能单元的其它相应描述,可以参考上述实施例中的对应描述,在此不再赘述。
[0258]
进一步地,作为对上述方法的实现,本技术实施例另一种可能的实现方式,若运输车设有读写器,载货部设有电子标签,装置还包括:
[0259]
绑定模块,用于当读写器首次读取电子标签的标签信息时,将运输车信息与标签信息匹配的货物信息进行绑定;
[0260]
解绑模块,用于当读写器再次读取电子标签的标签信息时,将运输车信息与标签
信息匹配的货物信息进行解绑;
[0261]
货物存放位置信息确定模块,用于将载货部所载货物在解绑时的位置信息确定为货物的存放位置信息;
[0262]
货位信息确定模块,用于基于货物的存放位置信息以及各个货位分别对应的货位信息,确定货物所存放的货位的货位信息;
[0263]
更新模块,用于基于货物所存放的货位的货位信息,更新已存储的货物信息与货位信息之间的关联关系;
[0264]
查找模块,用于当检测到查询请求时,基于查询请求中携带的货物信息以及货物信息与货位信息之间的关联关系,查找到货物信息所对应的货位信息;
[0265]
电子地图显示模块,用于在电子地图上对应位置处显示货物的货物信息及货物所在的货位信息,对应位置为货物所在货位在电子地图上所对应的位置。
[0266]
需要说明的是,本实施例提供的一种货物的定位装置所涉及各功能单元的其它相应描述,可以参考上述实施例中的对应描述,在此不再赘述。
[0267]
进一步地,作为对上述方法的实现,本技术实施例提供了一种货物的定位系统,包括处理器、设置在运输车上的至少两个定位标签,至少两个定位标签中各个定位标签的中心位于同一直线上;
[0268]
定位标签,用于定位;
[0269]
处理器,用于获取至少两个定位标签的位置信息及其中至少一个定位标签与目标点的相对位置信息,目标点位于直线上;
[0270]
根据至少两个定位标签的位置信息及相对位置信息,确定目标点的位置信息;
[0271]
将目标点的位置信息确定为运输车所载货物的位置信息。
[0272]
需要说明的是,本实施例提供的一种货物的定位系统所涉及的相应描述,可以参考上述实施例中的对应描述,在此不再赘述。
[0273]
根据本技术一个实施例提供了一种存储介质,存储介质存储有至少一可执行指令,该计算机可执行指令可执行上述任意方法实施例中的货物的定位方法。
[0274]
根据本技术一个实施例,如图13示出了一种电子设备的结构示意图,本技术具体实施例并不对电子设备的具体实现做限定。
[0275]
如图13所示,该电子设备可以包括:处理器(processor)1301、通信接口(communications interface)1302、存储器(memory)1303、以及通信总线1305。其中:处理器1301、通信接口1302、以及存储器1303通过通信总线1305完成相互间的通信。
[0276]
通信接口1302,用于与其它设备比如客户端或其它服务器等的网元通信。
[0277]
处理器1301,用于执行程序1304,具体可以执行上述货物的定位方法。
[0278]
具体地,程序1304可以包括程序代码,该程序代码包括计算机操作指令。
[0279]
处理器1301可能是中央处理器cpu,或者是特定集成电路asic(application specific integrated circuit),或者是被配置成实施本技术实施例的一个或多个集成电路。电子设备包括的一个或多个处理器,可以是同一类型的处理器,如一个或多个cpu;也可以是不同类型的处理器,如一个或多个cpu以及一个或多个asic。
[0280]
存储器1303,用于存放程序。存储器1303可能包含高速ram存储器,也可能还包括非易失性存储器(non-volatile memory),例如至少一个磁盘存储器。
[0281]
显然,本领域的技术人员应该明白,上述的本技术的各模块或各步骤可以用通用的计算装置来实现,它们可以集中在单个的计算装置上,或者分布在多个计算装置所组成的网络上,可选地,它们可以用计算装置可执行的程序代码来实现,从而,可以将它们存储在存储装置中由计算装置来执行,并且在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤,或者将它们分别制作成各个集成电路模块,或者将它们中的多个模块或步骤制作成单个集成电路模块来实现。这样,本技术不限制于任何特定的硬件和软件结合。
[0282]
以上仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包括在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。