技术特征:
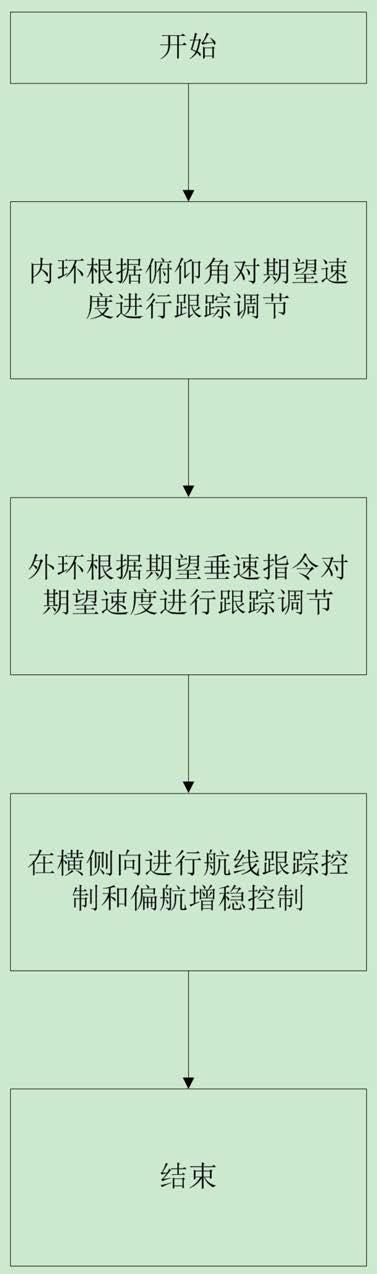
1.一种太阳能无人机无动力下滑控制方法,其特征在于,所述太阳能无人机无动力下滑控制方法包括:内环根据俯仰角对期望速度进行跟踪调节;外环根据期望垂速指令对所述期望速度进行跟踪调节;在横侧向进行航线跟踪控制和偏航增稳控制以完成太阳能无人机无动力下滑控制。2.根据权利要求1所述的太阳能无人机无动力下滑控制方法,其特征在于,内环根据俯仰角对期望速度进行跟踪调节具体包括:根据θ
pr
=kv(v-v
ias_pr
) k
vi
∫(v-v
ias_pr
)dt构建速度回路的控制律,其中,θ
pr
为期望俯仰角指令,v
ias_pr
为期望指示空速,v为指示空速,kv为第一速度回路控制参数,k
vi
为第二速度回路控制参数;根据所述速度回路的控制律对所述期望速度进行跟踪调节。3.根据权利要求1所述的太阳能无人机无动力下滑控制方法,其特征在于,外环根据期望垂速指令获取期望速度指令以对所述期望速度进行调节具体包括:根据构建纵向垂速回路的控制律,其中,v
c
为航点装订速度或设定的基准速度,为期望垂速指令,为垂速,为第一垂速控制回路控制律参数,为第二垂速控制回路控制律参数;根据所述纵向垂速回路的控制律对所述期望速度进行调节。4.根据权利要求3所述的太阳能无人机无动力下滑控制方法,其特征在于,在横侧向进行航线跟踪控制和偏航增稳控制具体包括:根据构建横侧向回路中偏航通道的控制律,其中,δ
r
为方向舵偏角指令,k
r
为偏航通道控制参数,为偏航角速率r的高通滤波值;根据δ
a
=k
p
p k
φ
(φ-φ
pr
) k
φi
∫(φ-φ
pr
)dt构建横侧向回路中内环滚转角回路的控制律,其中,δ
a
为副翼舵偏角指令,p为滚转角速率,φ为实际滚转角,φ
pr
为期望滚转角指令,k
p
为第一滚转角回路控制律参数,k
φ
为第二滚转角回路控制律参数,k
φi
为第三滚转角回路控制律参数;根据构建横侧向回路中外环滚转角回路的控制律,其中,dyr为航偏速度,dy为航线侧向偏差,dy
i
为航线侧向偏差dy的积分,δψv为飞行器当前时刻航迹角与期望航向的偏差,k
dyr
为第一航线跟踪回路控制律参数,k
dy
为第二航线跟踪回路控制律参数,k
dyi
为第三航线跟踪回路控制律参数,为第四航线跟踪回路控制律参数;根据所述横侧向回路中偏航通道的控制律、所述横侧向回路中内环滚转角回路的控制律和所述横侧向回路中外环滚转角回路的控制律进行航线跟踪控制和偏航增稳控制。
技术总结
本发明提供了一种太阳能无人机无动力下滑控制方法,该太阳能无人机无动力下滑控制方法包括:内环根据俯仰角对期望速度进行跟踪调节;外环根据期望垂速指令对期望速度进行跟踪调节;在横侧向进行航线跟踪控制和偏航增稳控制以完成太阳能无人机无动力下滑控制。应用本发明的技术方案,能够解决现有技术中太阳能无人机无动力下滑控制方法主要针对无动力下滑着陆阶段,且计算量较大,工程可行性较低,无法满足无人机的飞行安全性和能源优化的需求的技术问题。技术问题。技术问题。
技术研发人员:巩轶男 孙晓旭 谢勇 田景凡 陈小刚 张忠佐
受保护的技术使用者:海鹰航空通用装备有限责任公司
技术研发日:2020.08.21
技术公布日:2022/2/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。