1.本发明涉及家电领域,尤其涉及维护站及维护站的空气净化方法。
背景技术:
2.现有的扫地机器人为了能够持续运转,会增设一个维护站,维护站设有集尘腔和集尘机构,集尘机构包括尘袋、集尘管和风机,尘袋设于集尘腔中,当扫地机器人收集满灰尘碎屑时,自动运行至维护站,集尘管与扫地机器人的排尘口对接,并将扫地机器人中的灰尘碎屑抽吸至尘袋。
3.由于抽吸到尘袋中的灰尘碎屑含有一些细菌,且细菌在尘袋中会进行滋生,用户在更换尘袋时,尘袋中的细菌会对用户的健康产生影响。
技术实现要素:
4.有鉴于此,本发明公开了维护站及维护站的空气净化方法。
5.本发明的第一方面公开一种维护站,包括:
6.机壳,所述机壳设有集尘腔;
7.集尘机构,所述集尘机构包括集尘管、尘袋和风机,所述集尘管安装于所述机壳,所述集尘管包括连接端和对接端,所述尘袋设于所述集尘腔内并与所述连接端连通,所述对接端用于与扫地机器人对接,所述风机用于驱动扫地机器人中的灰尘经过所述集尘管流向所述尘袋;
8.其中,所述维护站还包括设于所述集尘腔的空气净化组件。
9.本发明的第二方面公开一种维护站的空气净化方法,所述维护站包括机壳和集尘机构,所述机壳设有集尘腔,所述集尘机构包括集尘管、尘袋和风机,所述集尘管安装于所述机壳,所述集尘管包括连接端和对接端,所述尘袋设于所述集尘腔内并与所述连接端连通,所述对接端用于与扫地机器人对接,所述风机用于驱动扫地机器人中的灰尘经过所述集尘管流向所述尘袋,所述维护站还包括设于所述集尘腔的空气净化组件,所述维护站的空气净化方法包括:
10.开启所述空气净化组件对所述集尘腔内的物品进行紫外杀菌。
11.从上述的技术方案可以看出,本发明公开的维护站及维护站的空气净化方法,通过在集尘腔设置空气净化组件,空气净化组件可以对集尘腔中的物品进行细菌消杀,特别是对收集于尘袋中的灰尘碎屑进行细菌消杀,避免尘袋中的灰尘碎屑细菌滋生,当用户更换尘袋时,尘袋中的细菌对人体的健康造成影响。
附图说明
12.为了更清楚地说明本发明实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以如这些附图获得其他的附图。
13.图1是本发明第一方面提供的维护站的结构示意图;
14.图2是本发明第一方面提供的集尘机构的结构示意图;
15.图3是本发明第一方面提供的维护站的一种爆炸示意图;
16.图4是图3中a处局部放大示意图;
17.图5是本发明第一方面提供的维护站的另一种爆炸示意图;
18.图6是本发明第一方面提供的一种第一管道组件的结构示意图;
19.图7是本发明第一方面提供的另一种第一管道组件的结构示意图;
20.图8是本发明第一方面提供的维护站的另一种爆炸示意图;
21.图9是图8中b处局部放大示意图;
22.图10本发明第一方面提供的维护站的另一种爆炸示意图;
23.图11是图10中c处局部放大示意图;
24.图12是本发明第一方面提供的扫地机器人系统的结构示意图;
25.图13是本发明第二方面提供的维护站的结构示意图;
26.图14是本发明第二方面提供的维护站的一种爆炸示意图;
27.图15是本发明第二方面提供的集尘机构的结构示意图;
28.图16是本发明第二方面提供的维护站的另一种爆炸示意图;
29.图17是本发明第三方面提供的维护站的方框示意图;
30.图18是本发明第三方面提供的维护站的局部结构示意图;
31.图19是图18中所示结构的一种爆炸示意图;
32.图20是图18中所示结构的另一种爆炸示意图;
33.图21是单个第一红外发射器的作用区域示意图;
34.图22是单个第二红外发射器的作用区域示意图;
35.图23是单个第三红外发射器的作用区域示意图;
36.图24是本发明第三方面提供的红外回充系统的结构示意图;
37.图25是本发明第四方面提供的维护站的结构示意图;
38.图26是图25中d-d截面示意图;
39.图27是图26中h处局部放大示意图;
40.图28是本发明第四方面提供的集尘机构的结构示意图;
41.图29是本发明第四方面提供的维护站的局部结构爆炸示意图;
42.图30是本发明第四方面提供的转接管的结构示意图;
43.图31是本发明第四方面提供的扫地机器人系统的结构示意图;
44.图32是本发明第五方面提供的水箱组件的结构示意图;
45.图33是本发明第五方面提供的水箱组件的爆炸示意图;
46.图34是图33中i处局部放大示意图;
47.图35是本发明第五方面提供的封口盖的结构示意图;
48.图36是本发明第五方面提供的扫地机器人的结构示意图;
49.图37是本发明第六方面提供的维护站的爆炸示意图;
50.图38是本发明第六方面提供的集尘机构的结构示意图;
51.图39是图37中j处局部放大示意图;
52.图40是本发明第七方面提供的扫地机器人系统的信号发送方法的流程示意图。
具体实施方式
53.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
54.还应当理解,在此本发明说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本发明。如在本发明说明书和所附权利要求书中所使用的那样,除非上下文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。
55.请参阅图1-2,本发明的第一方面提出一种维护站10,用于扫地机器人,维护站10包括机壳11和集尘机构12,机壳11设有开口111,集尘机构12包括集尘管121、尘袋122和风机123,集尘管121安装于机壳11,集尘管121包括连接端121a和对接端121b,连接端121a连通尘袋122,对接端121b用于与扫地机器人的排尘口对接,风机123用于驱动扫地机器人中的灰尘经过集尘管121流向尘袋122,其中,对接端121b可活动穿设于开口111。
56.使用时,扫地机器人运行至维护站10处并停靠在维护站10。集尘管121的对接端121b与扫地机器人的排尘口对接,风机123运转,在对接端121b处形成吸力,从而将扫地机器人中的灰尘通过集尘管121抽吸到尘袋122中。
57.采用上述的技术方案后,通过设置对接端121b可活动穿设于开口111,对接端121b与扫地机器人对接时,对接端121b可以自动进行位置矫正,不仅可以提高对接端121b与扫地机器人对接的成功率,而且对接后,对接端121b与扫地机器人的排尘口能够较好贴合,提高对接端121b与扫地机器人的排尘口之间的密封性。
58.示例性地,开口111设于机壳11的侧壁。
59.可选地,风机123安装于机壳11。在其他实施例中,风机123可以安装于集尘管121。
60.请参阅图3-4,在一个可选的实施例中,集尘管121包括第一管道组件1211和与第一管道组件1211连接的第二管道组件1212,第一管道组件1211设有所述对接端121a,第二管道组件1212为柔性管道组件。通过将第二管道组件1212设置为柔性管道组件,可以减小对第一管道组件1211运动时所形成的阻力,可选地,第二管道组件1212为采用硅胶材料制成的第二管道组件。
61.在一个可选的实施例中,维护站10还包括弹性件13,弹性件13的一端与第一管道组件1211连接,弹性件13的另一端与机壳11连接,弹性件13用于将第一管道组件1211拉向开口111。可选地,弹性件13选用弹簧。
62.在一个可选的实施例中,弹性件13设于第一管道组件1211的底部。
63.请参阅图5,在一个可选的实施例中,维护站10还包括支撑件14,支撑件14设于机壳11并抵接第一管道组件1211的底部。通过设置支撑件14,支撑件14可以对第一管道组件1211形成支撑,防止第一支撑组件1211在弹性件的作用下出现上翘的情况,不利于对接端121b与扫地机器人的对接。
64.请参阅图6,在一个可选的实施例中,第一管道组件1211包括第一管体1213和第二管体1214,第一管体1213的一端封口,第一管体1213的另一端与第二管道组件1212连接,第
二管体1214的一端与第一管体1213的侧壁连接并与第一管体1213连通,第二管体1214设有所述对接端121b,第二管体1214为柔性管体。通过设置第二管体1214为柔性管体,第二管体1214在和扫地机器人对接时,第二管体1214可以发生一定程度的形变,利于提高对接的成功率,而且可以使得第二管体1214与扫地机器人的排尘口之间的密封性更好。可选地,第二管体1214为采用硅胶材料制成的第二管体。
65.请参阅图7,在一个可选的实施例中,第一管道组件1211’包括第一管体1213’和第二管体1214’,第一管体1213’的一端与第二管道组件1212连接,第二管体1214’从第一管体1213’的另一端朝向开口111弯折延伸,第二管体1214’设有所述对接端121b,第二管体1214’远离第一管体1213’的一端设有柔性件1215’。通过在第二管体1214’远离第一管体1213’的一端设有柔性件1215’,第二管体1214’在和扫地机器人对接时,柔性件1215’可以发生一定程度的形变,利于提高对接的成功率,而且可以使得第二管体1214’与扫地机器人的排尘口之间的密封性更好。可选地,柔性件1215’采用硅胶材料制成。
66.请参阅图8-11,在一个可选的实施例中,机壳11设有滑槽15,第一管道组件1211中设有滑动件16,滑槽15沿第一管道组件1211的运动方向延伸,滑动件16可滑动嵌于滑槽15中。滑动件16和滑槽15的配合可以对第一管道组件1211的运动起到导向作用,防止第一管道组件1211运动时发生偏转,不利于对接端121b与扫地机器人的排尘口对接。需要说明的是,滑槽15和滑动件16的设置可以相反,即滑槽15设于第一管道组件1211,而滑动件16设于机壳11也是可以的。需要说明的是,在该实施例中,弹性件13可以设于第一管道组件1211的侧部或者设于第一管道组件1211的顶部,弹性件1213、滑槽15以及滑动件16的配合可以从上下两侧将第一管道组件1211拉住,防止第一管道组件1211出现偏转。
67.请参阅图12,本发明的第一方面还提出一种扫地机器人系统100,该扫地机器人系统包括扫地机器人101和上述的维护站10,扫地机器人101具有灰尘腔和与灰尘腔连通的排尘口102,扫地机器人101停靠在维护站10时,对接端121b与排尘口102对接。
68.在一个可选的实施例中,排尘口102的边缘设有柔性件103。柔性件103利于提高扫地机器人101与对接端121b对接的成功率,同时提高对接端121b与排尘口102之间的密封性。
69.请参阅图13-16,本发明的第二方面提出一种维护站20,用于扫地机器人,该维护站20包括机壳21和第一盖板22,机壳21设有收纳腔211,收纳腔211用于收纳扫地机器人和维护站的配件,第一盖板22与机壳21连接,第一盖板22用于封盖收纳腔211。例如,收纳腔211中可以放置一些清洁附件、hepa耗材、一次性拖布等。
70.采用上述的技术方案后,通过在机壳21设置收纳腔211用于收纳扫地机器人和维护站的配件,具有便利性,方便用户更换配件。
71.在一个可选的实施例中,收纳腔211设于机壳21的顶部。通过收纳腔211设于机壳21的顶部,便于配件的放置和取用,当然,收纳腔211也可以设于机壳21的侧部。
72.在一个可选的实施例中,第一盖板22的一侧与机壳21转动连接。在其他实施例中,第一盖板22也可以设置为机壳21滑动连接,类似滑动门的设置方式,通过推拉第一盖板22实现收纳腔211的开启和关闭。
73.在一个可选的实施例中,机壳21的顶部设有凹槽212,收纳腔211设于凹槽212的槽底面,第一盖板22封盖收纳腔211时,第一盖板22位于凹槽212中,以使第一盖板22不凸出于
机壳21的顶面。
74.在一个可选的实施例中,维护站20还包括安装座23和转动件24,机壳21的顶壁设有第一开口213,安装座23设于机壳21内并安装于机壳21,转动件24的一端与安装座23转动连接,转动件24的另一端穿过第一开口213并与第一盖板22的一侧连接。
75.示例性地,转动件24设有转轴241,安装座23设有轴孔231,转轴231可转动安装于轴孔241中,以使转动件24可以相对于安装座23转动。
76.在一个可选的实施例中,机壳21还设有集尘腔214,收纳腔211位于集尘腔214的旁侧。
77.在一个可选的实施例中,维护站20还包括第二盖板25,第二盖板25与机壳21连接,第二盖板25用于封盖集尘腔214。
78.在一个可选的实施例中,维护站20还包括安装于机壳21的集尘机构26,集尘机构26包括集尘管261、尘袋262和风机263,集尘管261安装于机壳21,集尘管261包括连接端261a和对接端261b,尘袋262设于集尘腔214内并与连接端261a连通,对接端261b用于与扫地机器人对接,风机263用于驱动扫地机器人中的灰尘经过集尘管261流向尘袋262。
79.在一个可选的实施例中,机壳21的侧壁设有第二开口215,对接端261b可活动穿设于第二开口215。通过设置对接端261b可活动穿设于第二开口215,对接端261b与扫地机器人对接时,对接端261b可以自动进行位置矫正,不仅可以提高对接端261b与扫地机器人对接的成功率,而且对接后,对接端261b与扫地机器人的排尘口能够较好贴合,提高对接端261b与扫地机器人的排尘口之间的密封性。
80.在一个可选的实施例中,集尘管261包括第一管道组件2611和与第一管道组件2611连接的第二管道组件2612,第一管道组件2611设有所述对接端261a,第二管道组件2612为柔性管道组件。
81.请参阅图17-24,本发明的第三方面提出一种维护站30,用于扫地机器人,该维护站30包括机壳31、充电机构32和红外回充系统33,充电机构32和红外回充系统33均安装于机壳31,充电机构32用于给扫地机器人充电,红外回充系统33包括远场红外发射模块331和近场红外发射模块332,远场红外发射模块331和近场红外发射模块332设于机壳31的不同高度。
82.采用上述的技术方案后,通过设置远场红外发射模块331和近场红外发射模块332设于机壳31的不同高度,远场红外发射模块331和近场红外发射模块332可以组成立体红外回充系统,从而实现较大的红外信号覆盖范围。
83.在一个可选的实施例中,远场红外发射模块331高于近场红外发射模块332设置。
84.在一个可选的实施例中,远场红外发射模块331包括两个第一红外发射器3311,两个第一红外发射器3311的中轴e的夹角为α1,α1=110
°-
130
°
,单个第一红外发射器3311的作用区域的两边缘为l1和l2,l1与l2的夹角为α2,α2=120
°-
140
°
。所述的中轴e指的是第一红外发射器3311的作用区域的两边缘为l1和l2的对称轴,该定义沿用至下文。
85.在一个可选的实施例中,远场红外发射模块331的覆盖范围为100cm-8000cm。
86.在一个可选的实施例中,近场红外发射模块332包括两个第二红外发射器3321,两个第二红外发射器3321的中轴f平行设置,单个第二红外发射器3321的作用区域的两边缘为s1和s2,s1与s2的夹角为α3,α3≤20
°
,可选地,α3=13
°-
15
°
。
87.在一个可选的实施例中,近场红外发射模块332的作用半径小于等于50cm。
88.在一个可选的实施例中,红外回充系统33还包括中场红外发射模块333,中场红外发射模块333包括两个第三红外发射器3331,两个第三红外发射器3331的中轴g的夹角为α4,α4≤90
°
,单个第三红外发射器3331的作用区域的两边缘为m1和m2,m1与m2的夹角为α5,α5≤130
°
。
89.在一个可选的实施例中,中场红外发射模块333的作用半径小于等于100cm。通过设置中场红外发射模块333,进一步拓宽了红外信号的覆盖范围。
90.在一个可选的实施例中,中场红外发射模块333与近场红外发射模块332等高设置。
91.在一个可选的实施例中,两个第三红外发射器3331位于两个第一红外发射器3311之间,两个第二红外发射器3321位于两个第三红外发射器3331之间,两个第一红外发射器3311、两个第二红外发射器3321、及两个第三红外发射器3331相对于同一个平面呈对称设置。
92.本发明的第三方面还提出一种扫地机器人系统,该扫地机器人系统包括扫地机器人以及上述的维护站,扫地机器人设有红外接收模块。
93.在一个可选的实施例中,扫地机器人在前进方向的前方和后方均设有红外接收模块。
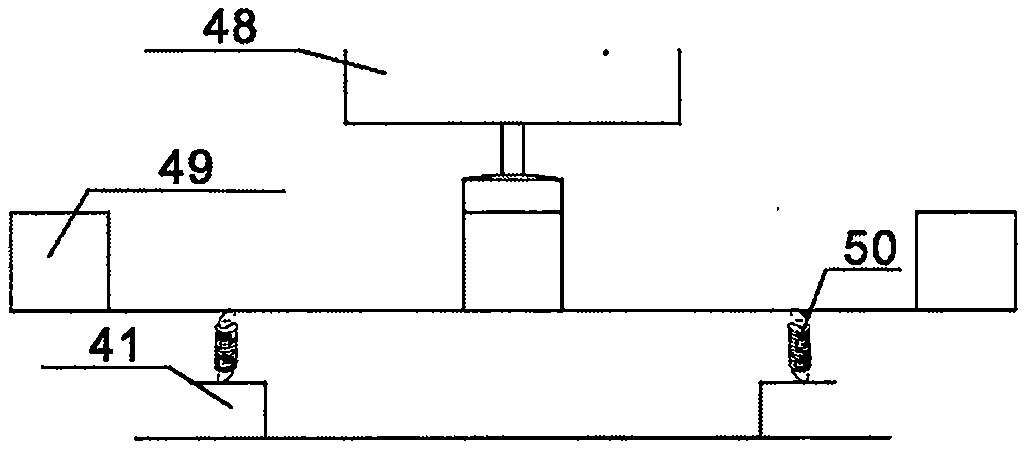
94.请参阅图25-30,本发明的第四方面提出一种维护站40,用于扫地机器人,该维护站40包括机壳41和集尘机构42,集尘机构42包括集尘管421、尘袋422和风机423,集尘管42安装于机壳41,集尘管421包括进尘管4211、转接管4212以及出尘管4213,进尘管4211用于与扫地机器人的排尘口对接,出尘管4213与尘袋422连通,风机423用于驱动扫地机器人中的灰尘经过集尘管42流向尘袋422,转接管4212的一端与进尘管4211连通,转接管4212的另一端与出尘管4213连通,其中,转接管4212为柔性管。
95.采用上述的技术方案后,通过设置转接管4212为柔性管,不仅降低了进尘管4211与转接管4212之间、以及出尘管4213与转接管4212之间的装配难度,而且,使得出尘管4213可以设置为可活动的。
96.在一个可选的实施例中,机壳41包括上壳体411设于上壳体411底部并与上壳体411连接的下壳体412,上壳体411设有集尘腔4111和连通集尘腔4111的集尘内管4112,出尘管4213穿设于集尘内管4112中,出尘管4213的下端与转接管4212的上端连接,进尘管4211安装于下壳体412并与转接管4212的下端连通。
97.在一个可选的实施例中,下壳体412包括下板体4121、设于下板体4121上侧的第一连接管4122、以及设于下板体4121下侧的第二连接管4123,转接管4212的下端与第一连接管4122连接,进尘管4211的一端与第二连接管4123连接。
98.在一个可选的实施例中,转接管4212的上端的内侧壁设有第一台阶4214,转接管4212的下端的内侧壁设有第二台阶4215,出尘管4213的下端穿设于转接管4212的上端并抵接第一台阶4214,第一连接管4122穿设于转接管4212的下端并抵接第二台阶4215。出尘管4213和第一连接管4122对转接管4212形成夹持固定。
99.可选地,出尘管4213的下端穿设于转接管4212的上端的长度不小于8mm。可选地,第一连接管4122穿设于转接管4212的下端的长度不小于8mm。可选地,转接管4212的上端的
内侧壁设有斜面,便于出尘管4213的下端穿设于转接管4212。可选地,出尘管4213的下端的内侧壁设有斜面,便于第一连接管4122穿设于转接管4212。
100.在一个可选的实施例中,转接管4212的外侧壁设有第一凸出部4216,第一凸出部4216朝向集尘内管4112的一侧设有卡槽4217,集尘内管4112的下端穿设于卡槽4217中。通过设置第一凸出部4216和集尘内管4112的配合,起到稳固转接管4212的作用。
101.在一个可选的实施例中,转接管4212的外侧壁还设有第二凸出部4218,第二凸出部4218设于第一凸出部4216远离集尘内管4112的一侧并与第一凸出部4216间隔设置,上壳体411的底部设有通孔4113和围设于通孔4113边缘的围壁4114,转接管4212穿设于通孔4113,围壁4114抵接第二凸出部4218。通过设置围壁4114抵接第二凸出部4218,进一步起到稳固转接管4212的作用。
102.在一个可选的实施例中,转接管4212上端的内侧壁设有环形凸起4219,环形凸起4219用于出尘管4213与转接管4212之间的密封。
103.在一个可选的实施例中,机壳41的侧壁开设有连通集尘腔4111的开口,出尘管4213的端部可活动穿设于开口。
104.在一个可选的实施例中,出尘管4213的中部的两侧设有转轴4220,机壳41在出尘管的两侧设有轴孔,转轴4220可转动穿设于轴孔中,以使出尘管4213的端部可活动穿设于开口。
105.请参阅图31,本发明的第四方面还提出一种扫地机器人系统400,该扫地机器人系统400包括扫地机器人401及上述的维护站40,维护站40具有灰尘腔和连通灰尘腔的排尘口402,扫地机器人401停靠在维护站时,进尘管4211与排尘口402对接。
106.请参阅图32-35,本发明的第五方面提出一种水箱组件51,用于扫地机器人,该水箱组件51包括水箱壳体511和过滤器,水箱壳体511具有容水腔5111、连通容水腔5111的进水口5112、以及连通容水腔5111的出水口(图未示),过滤器安装于进水口5112处,过滤器用于过滤注入容水腔5111中的水;其中,水箱壳体511还设有连通容水腔5111的透气孔5114。
107.采用上述的技术方案后,通过在进水口5112处设置过滤器过滤注入容水腔5111中的水,可以避免杂质进入到容水腔5111中堵塞出水口(图未示),同时拖地更干净,此外,通过在水箱壳体511设有连通容水腔5111的透气孔5114,透气孔5114在注水的过程中可以排出容水腔5111中的气体,使得注水更快更平稳。
108.在一个可选的实施例中,水箱组件51还包括封口盖513,封口盖513封盖进水口5112和透气孔5114。
109.在一个可选的实施例中,水箱组件51还包括封口盖513和防水透气膜(图未示),封口盖513封盖进水口5112,防水透气膜安装于透气孔5114处并覆盖透气孔5114。
110.在一个可选的实施例中,过滤器包括柱形支架5121和安装于柱形支架5121的过滤网(图未示),柱形支架5121和过滤网组合形成一端敞口的柱形过滤器,进水口5112的侧壁设有卡扣结构5115,过滤器的敞口端卡设于卡扣结构5115。
111.可选地,过滤网选用金属过滤网。在其他实施例中,柱形过滤器中也可以内置有其他过滤器件,例如海绵、pp(polypropylene,聚丙烯)棉滤芯、活性炭滤芯和离子交换膜中一种或多种的组合。
112.在一个可选的实施例中,柱形支架5121包括第一环状件5123、第二环状件5124、以
及若干个连接于第一环状件5123与第二环状件5124之间的筋条5125,第一环状件5123围合形成所述敞口。过滤网覆盖第二环状件5124的内侧,及相邻的两个筋条5125之间的空隙。
113.在一个可选的实施例中,封口盖513包括盖板5131和凸设于盖板5131的第一凸部5132,封口盖513封盖进水口5112时,第一凸部5132嵌于进水口5112中,第一凸部5132的外侧壁凸设有第一环形凸起5133,第一环形凸起5133抵接进水口5112的内侧壁,使得第一凸部5132与进水口5112的内侧壁之间形成密封。
114.在一个可选的实施例中,第一凸部5132呈环状,封口盖513还包括凸设于第一凸部5132内侧的第二凸部5134,第二凸部5134的外侧壁凸设有第二环形凸起5135,第二环形凸起5135卡设于第一环状件5123远离盖板5131的一侧。
115.在一个可选的实施例中,过滤器包括环形支架和安装于环形支架的过滤网,进水口5112的侧壁设有卡扣结构5115,环形支架卡设于卡扣结构5115。
116.请参阅图36,本发明的第五方面还提出一种扫地机器人50,该扫地机器人50包括主机组件52和上述水箱组件51,水箱组件51安装于主机组件52。水箱组件51用于提供扫地机器人50清洁所需的水。
117.本发明的第五方面还提出一种扫地机器人系统,该扫地机器人系统包括维护站和上述的扫地机器人,维护站包括机壳和供水机构,供水机构安装于机壳,供水机构用于向扫地机器人的容水腔注水。
118.请参阅图37-39,本发明的第六方面提出一种维护站60,用于扫地机器人,该维护站60包括机壳61和集尘机构62,机壳61设有集尘腔611,集尘机构62包括集尘管621、尘袋622和风机623,集尘管621安装于机壳61,集尘管621包括连接端621a和对接端621b,尘袋622设于集尘腔611内并与连接端621b连通,对接端621a用于与扫地机器人对接,风机623用于驱动扫地机器人中的灰尘经过集尘管621流向尘袋622;其中,维护站60还包括设于集尘腔611的空气净化组件63。
119.采用上述的技术方案后,通过在集尘腔611设置空气净化组件63,空气净化组件63可以对集尘腔611中的物品进行细菌消杀,特别是对收集于尘袋622中的灰尘碎屑进行细菌消杀,避免尘袋622中的灰尘碎屑细菌滋生,当用户更换尘袋622时,尘袋622中的细菌对人体的健康造成影响。
120.可选地,空气净化组件63可以为紫外杀菌组件、臭氧发生组件等。其中,紫外杀菌组件通过设置紫外灯发出紫外光对集尘腔611中的细菌进行消杀,臭氧发生组件通过产生臭氧对集尘腔611中的细菌进行消杀。
121.在一个可选的实施例中,维护站60还包括设于集尘腔内的除味干燥组件64,除味干燥组件64包括外壳641和内置于外壳641的除味剂和干燥剂。通过在集尘腔中设置除味干燥组件64,不仅可以去除集尘腔611中的水分,防止细菌滋生,而且还可以去除集尘腔611中的气味,防止集尘腔611中的气味扩散到周围环境,对周围环境造成影响。
122.在一个可选的实施例中,除味剂包括活性炭、塑料除味剂、高分子除味剂和光触媒中的一种或多种的组合。可选地,光触媒可以选用铂金光触媒,铂金光触媒配合空气净化组件63可以很好地去除集尘腔611中的气味。
123.在一个可选的实施例中,干燥剂包括活性炭、生石灰,硫酸钙、氯化钙、硅胶、活性氧化铝中的一种或多种的组合。
124.在一个可选的实施例中,外壳641的侧壁设有通孔6411。通过设置通孔6411,可以增大除味剂和干燥剂与集尘腔611中空气的接触面积,提升除味和除湿效果。
125.本发明的第六方面还提出一种维护站的空气净化方法,维护站60包括机壳61和集尘机构62,机壳61设有集尘腔611,集尘机构62包括集尘管621、尘袋622和风机623,集尘管621安装于机壳61,集尘管621包括连接端621a和对接端621b,尘袋622设于集尘腔611内并与连接端621a连通,对接端621b用于与扫地机器人对接,风机623用于驱动扫地机器人中的灰尘经过集尘管621流向尘袋623,维护站60还包括设于集尘腔611的空气净化组件63,维护站的空气净化方法包括:
126.开启空气净化组件63对集尘腔611内的物品进行紫外杀菌。
127.在一个可选的实施例中,维护站的空气净化方法还包括:
128.根据预设的单位时间内的运行次数,控制空气净化组件63对集尘腔611内的物品进行周期性杀菌。
129.需要说明的是,空气净化组件63也可以设置为常开状态,对集尘腔611内的物品进行不暂停杀菌。
130.在一个可选的实施例中,维护站的空气净化方法还包括:
131.检测尘袋622中的垃圾容量,当尘袋622中的垃圾容量大于容量预设值时,提高空气净化组件63在单位时间内的运行次数。
132.在一个可选的实施例中,维护站的空气净化方法还包括:
133.检测尘袋622中的垃圾容量,当尘袋622中的垃圾容量大于容量预设值时,延长空气净化组件63的单次杀菌时长。
134.例如,空尘袋时,每三天启动一次空气净化组件63,每次运行10mi n;
135.半满尘袋时,每两天启动一次空气净化组件63,每次运行20mi n;
136.满尘袋时,每天启动一次空气净化组件63,每次运行30mi n。
137.在一个可选的实施例中,检测尘袋中的垃圾容量包括:
138.检测集尘管621内的气压值,当集尘管621内的气压值大于预设气压预设值时,判定尘袋622中的垃圾容量大于容量预设值。
139.例如,对于一个2.5l的尘袋622,当集尘管621内的负压在30000pa时,尘袋622处于空尘袋状态;当集尘管621内的负压在19000pa时,尘袋622处于空尘袋状态;当集尘管621内的负压在8500pa时,尘袋622处于满尘袋状态。不同容量的尘袋622的容量状态对应不同的负压值。
140.请参阅图40,本发明的第七方面提出一种扫地机器人系统的信号发送方法s70,扫地机器人系统包括维护站和扫地机器人,扫地机器人系统设有回充系统,扫地机器人系统的信号发送方法s70包括:
141.s71,检测维护站,获得维护信息;
142.s72,当扫地机器人运行至维护站进行回充时,维护站将维护信息通过回充信号传输给扫地机器人;
143.s73,扫地机器人将维护信息发送给用户。
144.采用上述的技术方案后,维护站的维护信息通过回充信号传输给扫地机器人,这样,无需在维护站设置另外的通信模块以向用户发送维护信息,不仅可以降低成本,而且不
用增加其他通信模块,信号传输的调试也简单。
145.在一个可选的实施例中,扫地机器人设有无线通信模块,扫地机器人将维护信息发送给用户包括:通过无线通信模块将维护信息发送给用户终端。
146.在一个可选的实施例中,扫地机器人设有灯光组件和/或语音组件,扫地机器人将维护信息发送给用户包括:通过灯光组件和/或语音组件将维护信息提示给用户。
147.在一个可选的实施例中,维护站包括机壳和集尘机构,所述机壳设有集尘腔,集尘机构包括集尘管、尘袋和风机,集尘管安装于机壳,集尘管包括连接端和对接端,尘袋设于集尘腔内并与连接端连通,对接端用于与扫地机器人对接,风机用于驱动扫地机器人中的灰尘经过集尘管流向尘袋,所述检测维护站,获得维护信息包括:检测尘袋的容量,获得尘袋的容量信息。
148.在一个可选的实施例中,所述检测尘袋的容量,获得尘袋的容量信息包括:检测风机输送的气流的气压值,并根据气压值与尘袋容量的对应关系,获得尘袋的容量信息。
149.例如,对于一个2.5l的尘袋,当集尘管内的负压在30000pa时,尘袋处于空尘袋状态;当集尘管内的负压在19000pa时,尘袋处于空尘袋状态;当集尘管内的负压在8500pa时,尘袋处于满尘袋状态。不同容量的尘袋的容量状态对应不同的负压值。
150.在一个可选的实施例中,维护站还包括供水机构,机壳设有供水腔和出水口,供水机构包括连接于供水腔与出水口之间的管道及用于驱动供水腔中的水流向出水口的流体驱动装置,所述检测维护站,获得维护信息还包括:检测供水腔的容量,获得供水腔的容量信息。
151.在一个可选的实施例中,所述检测供水腔的容量,获得供水腔的容量信息包括:检测流经流体驱动装置的电信号值,当检测的电信号值小于预设电信号值时,获得供水腔已空信息。
152.需要说明的是,检测的维护信息不局限于包括充电信息、尘袋的容量信息和水箱的容量信息,还可以包括维护站的运行状态信息,例如,正在充电、正在加水和正在集尘的信息等。可以通过设置回充信号的不同频率和不同强度来区别维护信息。
153.在一个可选的实施例中,维护站设有红外发送模块和显示模块,扫地机器人设有红外接收模块,扫地机器人运行至维护站进行回充包括:
154.检测扫地机器人的电池电量;
155.当扫地机器人的电池电量低于预设电量阈值时,扫地机器人接收红外发送模块发射的红外信号,并生成控制指令;
156.根据控制指令控制扫地机器人运行至维护站处进行充电:
157.所述扫地机器人将检测的电量信息传输给所述维护站进行显示。
158.需要说明的是,控制扫地机器人运行至维护站进行回充的信号不局限于采用红外回充信号,例如,采用雷达定位信号、蓝牙定位信号也是可以的。
159.在一个可选的实施例中,红外发送模块发送远场红外信号和近场红外信号,维护站将维护信息通过回充信号传输给扫地机器人包括:维护站通过近场红外信号将维护信息传输给扫地机器人。关于远场红外信号和近场红外信号可以参照上述的远场红外发射模块和近场红外发射模块,在此不做赘述。
160.在一个可选的实施例中,维护站将维护信息通过回充信号传输给扫地机器人包
括:当扫地机器人运行至预设位置时,维护站开始向扫地机器人传送维护信息。例如,当扫地机器人与设于维护站上的充电机构接触时,维护站开始向扫地机器人传送维护信息。当然,也可以是扫地机器人运行至维护站并距离维护站的距离小于预设阈值时,维护站开始向扫地机器人传送维护信息。其中,可以通过检测充电机构上的电流信号以判定扫地机器人是否与维护站的充电机构接触。其中,可以在维护站上设置距离传感器,距离传感器检测扫地机器人与维护站之间的距离。
161.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。