技术特征:
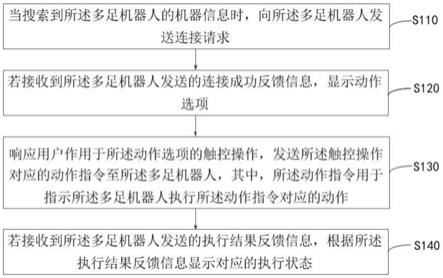
1.一种多足机器人的操控方法,其特征在于,应用于移动终端,所述方法包括:当搜索到所述多足机器人的机器信息时,向所述多足机器人发送连接请求;若接收到所述多足机器人发送的连接成功反馈信息,显示动作选项;响应用户作用于所述动作选项的触控操作,发送所述触控操作对应的动作指令至所述多足机器人,其中,所述动作指令用于指示所述多足机器人执行所述动作指令对应的动作;若接收到所述多足机器人发送的执行结果反馈信息,根据所述执行结果反馈信息显示对应的执行状态。2.根据权利要求1所述的方法,其特征在于,所述向所述多足机器人发送连接请求之前,还包括:通过蓝牙搜索并显示预设范围内的所有多足机器人的蓝牙地址;响应所述用户作用于所述蓝牙地址的触控操作,通过蓝牙协议将网络配置信息发送至所述蓝牙地址对应的多足机器人,其中,所述网络配置信息包括当前连接的无线网络的ssid和密码;接收所述多足机器人发送的配网成功反馈信息。3.根据权利要求1所述的方法,其特征在于,所述向所述多足机器人发送连接请求之后,还包括:若接收到所述多足机器人发送的连接失败反馈信息,根据所述连接失败反馈信息确定所述多足机器人的连接状态,其中,所述连接状态用于表示所述多足机器人与除所述移动终端以外的其他移动终端的连接状态;若所述连接状态为未连接状态,重复执行向所述多足机器人发送连接请求的步骤,并统计发送次数,直至所述发送次数大于等于预设次数,且未接收到所述连接成功反馈信息,显示丢失信息。4.根据权利要求1所述的方法,其特征在于,所述发送所述触控操作对应的动作指令至所述多足机器人之后,还包括:若在第一预设时间内未接收到所述多足机器人发送的执行结果反馈信息,显示执行失败状态。5.根据权利要求1所述的方法,其特征在于,所述接收到所述多足机器人发送的连接成功反馈信息之后,还包括:每隔第二预设时间向所述多足机器人发送alive信息;若第三预设时间内未接收到所述多足机器人发送的alive反馈信息,断开与所述多足机器人的连接。6.根据权利要求1所述的方法,其特征在于,所述向所述多足机器人发送连接请求之前,还包括:接收到第一开启指令时,发送更新请求至服务器;接收并根据所述服务器发送的所述多足机器人的更新反馈信息,更新所述多足机器人的控制指令。7.一种多足机器人的运行方法,其特征在于,应用于所述多足机器人,所述方法包括:广播机器信息;响应移动终端发送的连接请求,确定自身的连接状态,其中,所述连接状态用于表示所
述多足机器人与除所述移动终端以外的其他移动终端的连接状态;若所述连接状态为未连接状态,且连接至所述移动终端,向所述移动终端发送连接成功反馈信息;响应所述移动终端发送的动作指令,执行所述动作指令对应的动作;发送执行结果反馈信息至所述移动终端。8.根据权利要求7所述的方法,其特征在于,所述广播机器信息之前,还包括:响应第二开启指令,广播所述多足机器人的蓝牙地址;若通过蓝牙协议接收到所述移动终端发送的网络配置信息,执行配网,其中,所述网络配置信息包括所述多足机器人当前连接的无线网络的ssid和密码;若配网成功,则发送配网成功反馈信息至所述移动终端。9.根据权利要求7所述的方法,其特征在于,所述确定自身的连接状态之后,还包括:若所述连接状态为已连接状态,向所述移动终端发送连接失败反馈信息。10.根据权利要求7所述的方法,其特征在于,所述方法还包括:响应所述移动终端发送的alive信息,发送alive反馈信息至所述移动终端。11.一种多足机器人的操控装置,其特征在于,应用于移动终端,所述装置包括:连接请求发送模块,用于当搜索到所述多足机器人的机器信息时,向所述多足机器人发送连接请求;动作选项显示模块,用于若接收到所述多足机器人发送的连接成功反馈信息,显示动作选项;动作指令发送模块,用于响应用户作用于所述动作选项的触控操作,发送所述触控操作对应的动作指令至所述多足机器人,其中,所述动作指令用于指示所述多足机器人执行所述动作指令对应的动作;类型显示模块,用于若接收到所述多足机器人发送的执行结果反馈信息,根据所述执行结果反馈信息显示对应的执行状态。12.一种多足机器人的运行装置,其特征在于,应用于所述多足机器人,所述装置包括:广播模块,用于广播机器信息;确定模块,用于响应移动终端发送的连接请求,确定自身的连接状态,其中,所述连接状态包括已连接状态和未连接状态;发送模块,用于若所述连接状态为未连接状态,且连接至所述移动终端,向所述移动终端发送连接成功反馈信息;执行模块,用于响应所述移动终端发送的动作指令,执行所述动作指令对应的动作;所述发送模块,还用于发送执行结果反馈信息至所述移动终端。13.一种移动终端,其特征在于,所述移动终端包括存储器及处理器,所述存储器存储有计算机程序,所述计算机程序在所述处理器执行时,实现如权利要求1至6中任一项所述的多足机器人的操控方法。14.一种多足机器人,其特征在于,所述多足机器人包括存储器及处理器,所述存储器存储有计算机程序,所述计算机程序在所述处理器执行时,实现如权利要求7至11中任一项所述的多足机器人的运行方法。15.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机
程序,所述计算机程序被处理器执行时,实现如权利要求1至7中任一项所述多足机器人的操控方法或如权利要求7至11中任一项所述的多足机器人的运行方法。
技术总结
本申请实施例公开了一种多足机器人的操控方法、运行方法、操控装置及运行装置。所述操控方法应用于移动终端,包括:当搜索到所述多足机器人的机器信息时,向所述多足机器人发送连接请求;若接收到所述多足机器人发送的连接成功反馈信息,显示动作选项;响应用户作用于所述动作选项的触控操作,发送所述触控操作对应的动作指令至所述多足机器人,其中,所述动作指令用于指示所述多足机器人执行所述动作指令对应的动作;若接收到所述多足机器人发送的执行结果反馈信息,根据所述执行结果反馈信息显示对应的执行状态。本申请实施例提供的一种多足机器人的操控方法,实现判断多足机器人是否执行动作指令,提高用户体验的功能。提高用户体验的功能。提高用户体验的功能。
技术研发人员:黄劲松 周可可 李永峰 黄帅
受保护的技术使用者:上海优必杰教育科技有限公司
技术研发日:2021.11.23
技术公布日:2022/2/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。