1.本公开大体上涉及电动机,且更具体地,涉及在启动电动机之前确定转子位置和极性。
背景技术:
2.永磁体同步电机(pmsm)通常会在启动之前进行转子对齐过程。如果不进行转子对齐,pmsm可能在操作启动期间临时反转方向或发生机械振动,这在许多致动器或电动车辆应用中是不允许的。传统上,已使用包括霍尔装置、光学编码器和电感编码器的传感器来检测转子位置。由于可能存在额外的部件故障,因此使用传感器检测转子位置会增加系统复杂度且降低安全性。
3.最近的用于检测转子位置的无传感器系统依赖于耗时的电流测量、定子电感器电压的精确采样和/或时变总线电压的采样。这些方法中的每一种都降低了转子位置检测的可靠性,增加了成本、复杂度,且在一些情况下增加了电动机的启动时间。另外,确定转子位置的传统技术导致估计转子位置的准确度变低。
技术实现要素:
4.根据第一方面,提供一种用于电动机的初始位置检测的方法,包括:
5.对于从三个定子绕组中的两个定子绕组中选出的相应一对定子绕组中的每一个,其中所述三个定子绕组中的每一个连接到中性节点,确定相应的定子三角接线电压,每个相应的定子三角接线电压是通过以下项确定的多个三角接线电压中的一个:在相应的所述一对两端施加第一电压脉冲同时测量所述中性节点的相应第一电压,在相应的所述一对两端施加放电路径同时测量所述中性节点的相应第二电压,并且通过从所述相应第二电压中减去所述相应第一电压来确定所述三角接线电压;
6.根据所述三个相应定子三角接线电压中的每一个的绝对值的最小值来确定最小三角接线电压,所述最小三角接线电压与所述三个定子绕组中不包括在相应的所述一对中的剩余定子绕组相关联;
7.通过比较与所述最小三角接线电压不相关联的所述两个定子绕组的所述定子三角接线电压来确定对应于所述最小三角接线电压的所述剩余定子绕组与所述电动机的转子的d轴和所述转子的q轴之一的接近度;并且
8.通过比较第一转子三角接线电压与第二转子三角接线电压来确定所述转子的转子极性,其中所述第一转子三角接线电压和所述第二转子三角接线电压各自是根据包括与所述最小三角接线电压相关联的所述剩余定子绕组的一对定子绕组确定的所述多个三角接线电压之一。
9.根据一个或多个实施例,在连接到所述中性节点的所述剩余定子绕组的端处测量所述中性节点的所述第一电压和所述第二电压,其中所述剩余定子绕组未通电。
10.根据一个或多个实施例,用于确定所述转子极性的所述第一电压脉冲和所述第二
电压脉冲具有能够使与所述最小三角接线电压相关联的所述剩余定子绕组磁饱和的长持续时间。
11.根据一个或多个实施例,用于确定所述转子极性的所述第一电压脉冲和所述第二电压脉冲具有能够防止所述转子物理旋转的短持续时间。
12.根据一个或多个实施例,最小绝对电压对应于u相,当v相的所述相应定子三角接线电压大于w相的相应定子电压时所述剩余定子绕组接近所述d轴,并且当v相的所述相应定子三角接线电压小于或等于w相的所述相应定子电压时所述剩余定子绕组接近所述q轴。
13.根据一个或多个实施例,所述转子的所述初始位置为:
14.当所述第一转子三角接线电压的第一绝对值大于所述第二转子三角接线电压的第二绝对值且所述剩余定子绕组接近所述d轴时,相对于参考角标称地为0度,
15.当所述第一转子三角接线电压的所述第一绝对值小于或等于所述第二转子三角接线电压的所述第二绝对值且所述剩余定子绕组接近所述d轴时,相对于所述参考角标称地为180度,
16.当所述第一转子三角接线电压的第一绝对值大于所述第二转子三角接线电压的第二绝对值且所述剩余定子绕组接近所述q轴时,相对于所述参考角标称地为-90度,并且
17.当所述第一转子三角接线电压的所述第一绝对值小于或等于所述第二转子三角接线电压的所述第二绝对值且所述剩余定子绕组接近所述q轴时,相对于所述参考角标称地为90度。
18.根据一个或多个实施例,所述最小绝对电压对应于v相,当u相的所述相应定子三角接线电压大于w相的所述相应定子电压时所述剩余定子绕组接近所述d轴,并且当u相的所述相应定子三角接线电压小于或等于w相的所述相应定子电压时所述剩余定子绕组接近所述q轴。
19.根据一个或多个实施例,所述转子的所述初始位置为:
20.当所述第一转子三角接线电压的第一绝对值大于所述第二转子三角接线电压的第二绝对值且所述剩余定子绕组接近所述d轴时,相对于所述参考角标称地为30度,
21.当所述第一转子三角接线电压的所述第一绝对值小于或等于所述第二转子三角接线电压的所述第二绝对值且所述剩余定子绕组接近所述d轴时,相对于所述参考角标称地为-150度,
22.当所述第一转子三角接线电压的第一绝对值大于所述第二转子三角接线电压的第二绝对值且所述剩余定子绕组接近所述q轴时,相对于所述参考角标称地为120度,并且
23.当所述第一转子三角接线电压的所述第一绝对值小于或等于所述第二转子三角接线电压的所述第二绝对值且所述剩余定子绕组接近所述q轴时,相对于所述参考角标称地为-60度。
24.根据一个或多个实施例,所述最小绝对电压对应于w相,当u相的所述相应定子三角接线电压大于v相的所述相应定子电压时所述剩余定子绕组接近所述d轴,并且当u相的所述相应定子三角接线电压小于或等于v相的所述相应定子电压时所述剩余定子绕组接近所述q轴。
25.根据一个或多个实施例,所述转子的所述初始位置为:
26.当所述第一转子三角接线电压的第一绝对值大于所述第二转子三角接线电压的
第二绝对值且所述剩余定子绕组接近所述d轴时,相对于所述参考角标称地为-120度,
27.当所述第一转子三角接线电压的所述第一绝对值小于或等于所述第二转子三角接线电压的所述第二绝对值且所述剩余定子绕组接近所述d轴时,相对于所述参考角标称地为60度,
28.当所述第一转子三角接线电压的第一绝对值大于所述第二转子三角接线电压的第二绝对值且所述剩余定子绕组接近所述q轴时,相对于所述参考角标称地为150度,并且
29.当所述第一转子三角接线电压的所述第一绝对值小于或等于所述第二转子三角接线电压的所述第二绝对值且所述剩余定子绕组接近所述q轴时,相对于所述参考角标称地为-30度。
30.根据本发明的第二方面,提供一种设备,包括:
31.电动机的转子,所述转子包括直(d)轴和交(q)轴,其中所述d轴限定所述转子的最大磁阻的第一路径且所述q轴限定最大产生力矩的第二路径;和
32.所述电动机的多个定子绕组,其中从所述多个定子绕组中选择三对定子绕组;以及
33.控制器,所述控制器被配置成:
34.通过依序给每一对定子绕组通电和断电来确定每一对定子绕组的三角接线电压,其中通过连接到相应的每一对的中心抽头的未通电定子绕组来测量所述三角接线电压,
35.根据所述三个三角接线电压中的每一个的绝对值的最小值来确定最小三角接线电压,其中所述最小三角接线电压与不包括在相应的所述一对中的剩余定子绕组相关联,并且
36.比较与所述最小三角接线电压不相关联的所述两个三角接线电压,以确定所述剩余定子绕组与所述转子的所述d轴和所述转子的q轴之一的接近度。
37.根据一个或多个实施例,所述电动机包括永磁体同步电机(pmsm)。
38.根据一个或多个实施例,所述电动机包括无刷直流电(bldc)电机。
39.根据一个或多个实施例,所述控制器另外被配置成依序给包括与所述最小三角接线电压相关联的所述剩余定子绕组的一对定子绕组通电和断电,以测量第一转子三角接线电压和第二转子三角接线电压,其中通过在与用于测量第二转子三角接线电压的第二电压脉冲相反的方向上施加第一电压脉冲来测量第一转子三角接线电压;且通过将所述第一转子三角接线电压与所述第二转子三角接线电压进行比较来确定所述转子的转子极性。
40.根据一个或多个实施例,所述控制器另外被配置成通过经由相应的短路二极管连接依序将每一对定子绕组连接到电源和接地之一来给每一对定子绕组通电。
41.根据本发明的第三方面,提供一种用于电动机的初始位置检测的方法,包括:
42.通过依序给三对定子绕组中的每一对通电和断电来确定每一对的三角接线电压,其中通过连接到相应的每一对的中心抽头的未通电定子绕组来测量所述三角接线电压;
43.根据所述三个三角接线电压中的每一个的绝对值的最小值来确定最小三角接线电压,其中所述最小三角接线电压与不包括在相应的所述一对中的所述剩余定子绕组相关联;并且
44.比较与所述最小三角接线电压不相关联的所述两个三角接线电压,以确定所述剩余定子绕组与所述电动机的转子的直(d)轴和所述转子的交(q)轴之一的接近度,其中所述
d轴限定所述转子的最大磁阻的第一路径且所述q轴限定最大产生力矩的第二路径。
45.根据一个或多个实施例,另外包括依序给包括与所述最小三角接线电压相关联的所述剩余定子绕组的一对定子绕组通电和断电,以测量第一转子三角接线电压和第二转子三角接线电压,其中通过在与用于测量第二转子三角接线电压的第二电压脉冲相反的方向上施加第一电压脉冲来测量第一转子三角接线电压,且通过将所述第一转子三角接线电压与所述第二转子三角接线电压进行比较来确定所述转子的转子极性。
46.根据一个或多个实施例,用于确定所述转子极性的所述第一电压脉冲和所述第二电压脉冲具有能够使与所述最小三角接线电压相关联的所述剩余定子绕组磁饱和的长持续时间。
47.根据一个或多个实施例,用于确定所述转子极性的所述第一电压脉冲和所述第二电压脉冲具有能够防止所述转子物理旋转的短持续时间。
48.根据一个或多个实施例,给所述三对定子绕组中的每一对通电包括通过相应的短路二极管连接将相应的每一对连接到电源和接地之一。
附图说明
49.本发明借助于例子示出并且不受附图的限制,附图中的相似标记指示类似元件。为简单和清晰起见示出图中的元件,并且元件不一定按比例绘制。
50.图1、图2和图3是示出用于转子位置的初始确定的定子自电感与转子永磁体位置之间的各种物理关系的示例实施例的示意图。
51.图4和图5是根据本公开的示例实施例的被配置成分别在脉冲注入区间和续流区间期间的电动机的示意图。
52.图6和图7是示出用于转子极性的确定的定子自电感与转子永磁体位置之间的两种物理关系的示例实施例的示意图。
53.图8是示出根据本公开的示例实施例的确定的转子位置的极坐标图。
54.图9是根据本公开的示例实施例的用于确定图8的转子位置的方法的流程图表示。
55.图10是进一步示出根据本公开的示例实施例的图8和图9的转子位置的确定的表格视图。
56.图11是根据本公开的示例实施例的用于电动机的初始位置检测的方法的流程图表示。
57.图12是根据本公开的示例实施例的用于电动机的初始位置检测的方法的流程图表示。
具体实施方式
58.本文所述实施例提供转子的位置和极性的检测以促进电动机的启动。在三个定子绕组的每一对中依序注入三个短脉冲,其中在脉冲注入区间期间和
‘
续流’区间期间进行测量。当消除所注入的电压脉冲并且随着定子电感器断电而使定子产生反电动势(emf)时,发生续流区间。通过在脉冲注入期间从所注入的电压中减去续流电压来对每一对定子绕组进行相对电压测量。在一个实施例中,通过浮动相位(例如,未形成电感器对的剩余电感器)来测量每一对电感器的电压差以确定中心抽头电压。中心抽头电压的值与定子电感器产生并
释放磁场能量的能力有关,产生并释放磁场能量的能力另外与定子电感有关。定子电感随定子电感器相对于转子的位置而改变,因而可用于确定一对完全相对的转子位置。
59.通过在包括接近转子的定子绕组的定子对上施加两个较长的电压脉冲且比较在注入区间期间和续流区间期间进行的测量来进一步确定转子的极性,其中每个电压脉冲以相反极性施加到定子对。长脉冲被设计成在不引起转子物理旋转的情况下使转子芯磁饱和。通过使用转子芯的非线性磁饱和现象,每个所施加的脉冲的两个测得的电压将根据转子极性而增大或减小。因此,除了其它优点之外,转子位置和极性的确定还具有极少的施加能量、较少的噪音、提高的可靠性、鲁棒性和准确度。具体地,在每个电感器的中心抽头端处进行相对电压测量,以减少由于总线电压变化而引起的误差,增强数据解析度并提高可靠性。电压测量时间比先前解决方案中所使用的执行电流测量所需的时间短。计算转子位置的执行时间非常短,这对于汽车应用来说至关重要。由于注入到电感器中的能量减小,在电动机启动期间产生的噪音也非常小。
60.图1、图2和图3示出定子自电感与转子位置之间的物理关系的示例实施例。为简单起见,因为由互电感引起的感应电压没有发生明显变化,因此不需要分析定子绕组的互电感。由于磁凸度,每个定子电感的大小与磁路中由定子和转子形成的磁阻有关。较大磁性磁阻(例如,磁阻)减小了电感值。类似地,定子绕组的较小磁性磁阻增强了定子绕组的自电感。磁性磁阻表示与磁通量相反。因此,当转子与定子绕组对齐时,磁通量更易于流动,从而导致磁性磁阻增大且因此导致自电感减弱。
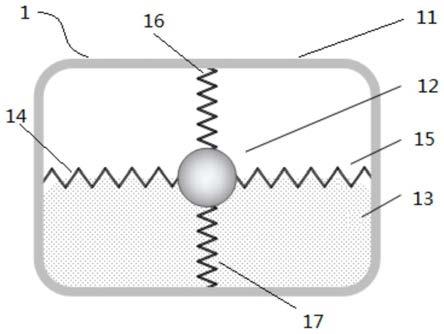
61.图1示出三相电动机的实施例10,所述三相电动机包括u相定子绕组13的u相端12、v相定子绕组15的v相端14和w相定子绕组17的w相端16。中性节点18(或“中心抽头”)连接三个定子绕组中的每一个。转子19包括北极20和南极22。直(d)轴24限定转子的最大磁阻的路径。正(q)轴26限定最大产生力矩的路径。在图中1,u相定子绕组13的电感(lu)小于v相定子绕组15的电感(lv)。电感lv等于w相定子绕组17的电感(lw)。将图1的示例实施例10与图2的示例实施例30以及图3的示例实施例50进行比较,图2的lu电感大于图3的lu电感,图3的lu电感又大于图1的lu电感。重申一遍,由于不同的转子位置,因此u相定子绕组13的lu电感在图1中最小而在图2中最大。
62.图4和图5示出分别针对脉冲注入区间和续流区间的电动机的示例实施例70和110。在图4的实施例70中,电压源71的正极端通过可由开关74短路的二极管72连接到u相端12。电压源71的负极端通过可由开关78短路的二极管76连接到u相端12。电压源71的正极端通过可由开关84短路的二极管82连接到v相端14。电压源71的负极端通过可由开关88短路的二极管86连接到v相端14。电压源71的正极端通过可由开关94短路的二极管92连接到w相端16。电压源71的负极端通过可由开关98短路的二极管96连接到w相端16。示例实施例70和110中的每一个包括控制器100。在一个示例实施例中,控制器100包括被配置成控制开关74、78、94、98、84和88的状态机、机器代码和/或固件中的一个或多个的组合。
63.在示例实施例70中,一对定子绕组包括u相定子绕组13和w相定子绕组17。在脉冲注入区间期间,控制器100用开关74使二极管72短路且用开关98使二极管96短路。因此,电流102从电压源(vdc)71的正极端流过开关74,并且流过u相定子绕组13。电流104流过w相定子绕组17和开关98,到达电压源71的负极端。因此,给由u相定子绕组13和w相定子绕组17形成的一对定子绕组通电。在u相端12连接到电压源71的正极端且w相端16连接到电压源71的
负极端的情况下,施加到一对定子绕组(例如“电机定子”)的电压为uuw。通过浮动v相定子绕组14在v相端14处测得的电压与中性节点18处的电压基本相同。通过下式得出此脉冲注入区间之后的中性节点18的电压vv1,其中lw和lu分别是w相定子绕组17和u相定子绕组13的电感:
64.(1)vv1=[lw/(lu lw)]*vdc
[0065]
在示例实施例110中,一对定子绕组包括u相定子绕组13和w相定子绕组17。在续流区间期间,控制器100断开开关74和开关98。因此,电流106从电压源71的负极端流过二极管76,并且流过u相定子绕组13。电流108流过w相定子绕组17和二极管92,到达电压源71的正极端。因此,给由u相定子绕组13和w相定子绕组17形成的一对定子绕组断电,从而产生反emf以产生电流106和108。通过下式得出此脉冲注入区间之后的中性节点18的电压vv2:
[0066]
(2)vv2=[lu/(lu lw)]*vdc
[0067]
因此,通过下式得出一对定子绕组两端的三角接线电压:
[0068]
(3)δvv=vv2-vv1
[0069]
用剩余的定子对重复如针对由u相定子绕组13和w相定子绕组17形成的定子对所描述的用于确定δvv的给多对定子绕组中的每一对通电和断电的过程,以产生δvu和δvw。具体地,根据使用v相定子绕组15和w相定子绕组17两端的电压脉冲uvw的脉冲注入区间和续流区间的测量产生δvu。根据使用u相定子绕组13和v相定子绕组15两端的电压脉冲uuv的脉冲注入区间和续流区间的测量产生δvw。
[0070]
接着,根据相应定子三角接线电压δvu、δvv和δvw中的每一个的绝对值的最小值来确定最小三角接线电压,如通过下式得出:
[0071]
(3)δvmin = min(|δvu|, |δvv|, |δvw|)
[0072]
如图1和图2中所示,当δvmin=|δvu|时,与剩余的两个定子绕组15和17相比,u相定子绕组13最靠近d轴24或q轴26对齐。相反,如果δvmin=|δvv|,则v相定子绕组15最靠近d轴24或q轴26对齐,且如果δvmin=|δvw|,则w相定子绕组17最靠近d轴24或q轴26对齐。
[0073]
使用根据包括与δvmin相关联的定子绕组的每一对定子绕组确定的先前确定的三角接线电压中的两个来区分与δvmin相关联的定子绕组是最接近d轴24还是最接近q轴26。例如,当δvmin=|δvu|时,用δvv(根据uuw确定)且根据δvw(根据uuv确定)来分析u相定子绕组13是接近d轴24还是接近q轴26。具体地,当δvv大于δvw时,则u相定子绕组13接近d轴24。当δvv小于或等于δvw时,则u相定子绕组13接近q轴26。在另一实施例中,使用单端型测量,其中如果δvw大于零,则u相定子绕组13接近q轴26,否则u相定子绕组13接近d轴24。
[0074]
一旦确定定子绕组(与δvmin相关联)与轴的接近度,就能确定与定子绕组对齐的转子19的极性。图6的示例实施例120示出与u相定子绕组13对齐的转子19的北极20。相比而言,图7的示例实施例130示出与u相定子绕组13对齐的转子19的南极22。将电压脉冲信号施加到包括与δvmin相关联的定子绕组的一对定子绕组以确定转子19的极性。例如,参考图6和图7,将电压脉冲施加到包括u相定子绕组13和v相定子绕组15的一对定子,或施加到u相定子绕组13和w相定子绕组17。
[0075]
在一个例子中,将长电压脉冲uuv施加到包括u相定子绕组13和v相定子绕组15的
一对定子绕组,使用定子芯的非线性磁饱和特性来确定转子极性。所施加的长电压脉冲足够长以确保定子绕组(例如,图6中的u相定子绕组13)是磁饱和的,同时也足够短以防止转子19物理旋转。如图6中所示,当长uuv被施加到端12和14两端时,u相定子绕组13中的电流将减弱转子通量对lu和lv的影响并因此减小lu和lv的值。然而,与v相定子绕组15相比,u相定子绕组13更有可能磁饱和,因而等式dlu/di》dlv/di成立。重申一遍,u相定子绕组13的电感lu将比lv更明显地减小。相反,如图7中所示,电感lu将比lv更明显地增大。
[0076]
首先将长电压脉冲uuv在脉冲注入区间施加到一对定子以确定vw1,接着将所述长电压脉冲uuv施加到续流区间以确定vw2,接着vw2-vw1的差值确定δvw1,与图4和图5的描述类似。随后反转电压感测以施加长电压脉冲uvu,用与确定δvw1类似的方式确定δvw2。最后,如果|δvw1|》|δvw2|,则北极20与u相定子绕组13对齐,如图6中所示。否则,南极22与u相定子绕组13对齐,如图7中所示。
[0077]
图8是示出根据本公开的示例实施例的转子19的各个位置的极坐标图。在图8中,在正或负15度内解析转子19的位置,其中相对于0度处的参考角解析角范围140、142、144、146、148、150、152、154、156、158、160、162、164、166、168和170。参考图6、图7和图8,在一个示例实施例中,δvmin=|δvu|。因而,转子19在角范围140、170、154、156、148、146、162或164处与u相定子绕组13对齐。在确定u相定子绕组13接近d轴24之后,转子19被解析成与140、170、154或156对齐。在解析转子19的极性方向之后,转子对齐将在图6的情况下对应于角范围140或170,或在图7的情况下对应于154或156。
[0078]
图9是根据本公开的示例实施例的用于确定图8的转子位置的方法180的流程图表示。方法180在182处开始。在184处,根据图4和图5在每一对定子绕组两端注入第一组电压脉冲。在186处,计算δvu、δvv和δvw的值。在190、192和194处,分别根据δvmin=min(|δvu|)、min(|δvv|)还是min(|δvw|),遵循三个决策分支中的一个。
[0079]
在190处,如果δvmin=min(|δvu|),则在200处注入第二组长电压脉冲。参考图6和图7进一步描述长电压脉冲。在202处,确定δw1和δw1的值。在204处,如果δv》δw,则与δvmin相关联的定子绕组接近d轴24,否则所述绕组接近q轴26。在206处,如果|δw1|》|δw2|,则转子位置在212处为0度(参见图8的140或170),否则转子位置在210处为180度(参见图8的154或156)。在208处,如果|δw1|》|δw2|,则转子位置在216处为-90度(参见图8的162或164),否则转子位置在214处为90度(参见图8的146或148)。
[0080]
在192处,如果δvmin=min(|δvv|),则在220处注入第二组长电压脉冲。参考图6和图7进一步描述长电压脉冲。在222处,确定δu1和δu1的值。在224处,如果δu》δw,则与δvmin相关联的定子绕组接近d轴24,否则所述绕组接近q轴26。在226处,如果|δu1|》|δu2|,则转子位置在232处为30度(参见图8的142),否则转子位置在230处为-150度(参见图8的158)。在228处,如果|δu1|》|δu2|,则转子位置在236处为120度(参见图8的150),否则转子位置在234处为-60度(参见图8的166)。
[0081]
在194处,如果δvmin=min(|δvw|),则在240处注入第二组长电压脉冲。参考图6和图7进一步描述长电压脉冲。在242处,确定δv1和δv1的值。在244处,如果δu》δv,则与δvmin相关联的定子绕组接近d轴24,否则所述绕组接近q轴26。在246处,如果|δv1|》|δv2|,则转子位置在252处为-120度(参见图8的160),否则转子位置在250处为60度(参见图8的144)。在248处,如果|δv1|》|δv2|,则转子位置在256处为150度(参见图8的152),否则
转子位置在254处为-3
0度(参见图8的168)。在218处,方法180结束。
[0082]
图10是进一步示出根据本公开的示例实施例的图8和图9的转子位置的确定的表格视图。图11示出用于电动机的初始位置检测的方法的示例实施例270。在272处,针对每一对定子绕组确定相应定子三角接线电压(δvu、δvv或δvw)。在274处,根据每个定子三角接线电压确定与剩余定子绕组相关联的最小三角接线电压(δvmin)。在276处,确定对应于最小三角接线电压的剩余定子绕组与转子19的d轴24或q轴26的接近度。在278处,通过将第一转子三角接线电压与第二转子三角接线电压进行比较(例如,|δw1|》|δw2|)来确定转子极性。
[0083]
图12示出用于电动机的初始位置检测的方法的示例实施例280。在282处,通过给每一对通电(参见图4)和断电(参见图5)来确定每一对定子绕组的相应三角接线电压。在284处,根据每个定子三角接线电压确定与剩余定子绕组相关联的最小三角接线电压。在286处,比较与最小三角接线电压不相关联的两个三角接线电压以确定剩余定子绕组与转子19的d轴24或q轴26的接近度。
[0084]
如应了解,所公开的实施例包括至少以下内容。在一个实施例中,一种用于电动机的初始位置检测的方法包括:对于从三个定子绕组中的两个定子绕组中选出的相应一对定子绕组中的每一个,其中所述三个定子绕组中的每一个连接到中性节点,确定相应的定子三角接线电压,每个相应的定子三角接线电压是通过以下项确定的多个三角接线电压中的一个:在相应的一对两端施加第一电压脉冲同时测量中性节点的相应第一电压,在相应的一对两端施加放电路径同时测量中性节点的相应第二电压,并且通过从相应第二电压中减去相应第一电压来确定三角接线电压。根据三个相应定子三角接线电压中的每一个的绝对值的最小值来确定最小三角接线电压,所述最小三角接线电压与三个定子绕组中不包括在相应的一对中的剩余定子绕组相关联。通过比较与最小三角接线电压不相关联的两个定子绕组的定子三角接线电压来确定对应于最小三角接线电压的剩余定子绕组与电动机的转子的d轴和转子的q轴之一的接近度。通过比较第一转子三角接线电压与第二转子三角接线电压来确定转子的转子极性,其中第一转子三角接线电压和第二转子三角接线电压各自是根据包括与最小三角接线电压相关联的剩余定子绕组的一对定子绕组确定的多个三角接线电压之一。
[0085]
用于电动机的初始位置检测的方法的替代实施例包括以下特征之一或以下特征的任何组合。在连接到中性节点的剩余定子绕组的端处测量中性节点的第一电压和第二电压,其中剩余定子绕组未通电。用于确定转子极性的第一电压脉冲和第二电压脉冲具有能够使与最小三角接线电压相关联的剩余定子绕组磁饱和的长持续时间。用于确定转子极性的第一电压脉冲和第二电压脉冲具有能够防止转子物理旋转的短持续时间。最小绝对电压对应于u相,当v相的相应定子三角接线电压大于w相的相应定子电压时剩余定子绕组接近d轴,并且当v相的相应定子三角接线电压小于或等于w相的相应定子电压时剩余定子绕组接近q轴。最小绝对电压对应于u相且转子的初始位置为:当第一转子三角接线电压的第一绝对值大于第二转子三角接线电压的第二绝对值且剩余定子绕组接近d轴时,相对于参考角标称地为0度;当第一转子三角接线电压的第一绝对值小于或等于第二转子三角接线电压的第二绝对值且剩余定子绕组接近d轴时,相对于参考角标称地为180度;当第一转子三角接线电压的第一绝对值大于第二转子三角接线电压的第二绝对值且剩余定子绕组接近q轴
时,相对于参考角标称地为-90度;并且当第一转子三角接线电压的第一绝对值小于或等于第二转子三角接线电压的第二绝对值且剩余定子绕组接近q轴时,相对于参考角标称地为90度。最小绝对电压对应于v相,当u相的相应定子三角接线电压大于w相的相应定子电压时剩余定子绕组接近d轴,并且当u相的相应定子三角接线电压小于或等于w相的相应定子电压时剩余定子绕组接近q轴。最小绝对电压对应于v相且转子的初始位置为:当第一转子三角接线电压的第一绝对值大于第二转子三角接线电压的第二绝对值且剩余定子绕组接近d轴时,相对于参考角标称地为30度;当第一转子三角接线电压的第一绝对值小于或等于第二转子三角接线电压的第二绝对值且剩余定子绕组接近d轴时,相对于参考角标称地为-150度;当第一转子三角接线电压的第一绝对值大于第二转子三角接线电压的第二绝对值且剩余定子绕组接近q轴时,相对于参考角标称地为120度;并且当第一转子三角接线电压的第一绝对值小于或等于第二转子三角接线电压的第二绝对值且剩余定子绕组接近q轴时,相对于参考角标称地为-60度。最小绝对电压对应于w相,当u相的相应定子三角接线电压大于v相的相应定子电压时剩余定子绕组接近d轴,并且当u相的相应定子三角接线电压小于或等于v相的相应定子电压时剩余定子绕组接近q轴。最小绝对电压对应于w相且转子的初始位置为:当第一转子三角接线电压的第一绝对值大于第二转子三角接线电压的第二绝对值且剩余定子绕组接近d轴时,相对于参考角标称地为-120度;当第一转子三角接线电压的第一绝对值小于或等于第二转子三角接线电压的第二绝对值且剩余定子绕组接近d轴时,相对于参考角标称地为60度;当第一转子三角接线电压的第一绝对值大于第二转子三角接线电压的第二绝对值且剩余定子绕组接近q轴时,相对于参考角标称地为150度;并且当第一转子三角接线电压的第一绝对值小于或等于第二转子三角接线电压的第二绝对值且剩余定子绕组接近q轴时,相对于参考角标称地为-30度。
[0086]
在另一实施例中,一种设备包括电动机的转子,所述转子包括直(d)轴和交(q)轴,其中d轴限定转子的最大磁阻的第一路径,且q轴限定最大产生力矩的第二路径。设备另外包括电动机的多个定子绕组,其中从所述多个定子绕组中选择三对定子绕组。设备进一步包括控制器,所述控制器被配置成:通过依序给每一对定子绕组通电和断电来确定每一对定子绕组的三角接线电压,其中通过连接到相应的每一对的中心抽头的未通电定子绕组来测量所述三角接线电压;根据三个三角接线电压中的每一个的绝对值的最小值来确定最小三角接线电压,其中所述最小三角接线电压与不包括在相应的一对中的剩余定子绕组相关联;并且比较与最小三角接线电压不相关联的两个三角接线电压,以确定剩余定子绕组与转子的d轴和转子的q轴之一的接近度。
[0087]
设备的替代实施例包括以下特征之一或以下特征的任何组合。电动机包括永磁体同步电机(pmsm)。电动机包括无刷直流电(bldc)电机。控制器另外被配置成依序给包括与最小三角接线电压相关联的剩余定子绕组的一对定子绕组通电和断电,以测量第一转子三角接线电压和第二转子三角接线电压,其中通过在与用于测量第二转子三角接线电压的第二电压脉冲相反的方向上施加第一电压脉冲来测量第一转子三角接线电压;且通过将第一转子三角接线电压与第二转子三角接线电压进行比较来确定转子的转子极性。控制器另外被配置成通过经由相应的短路二极管连接依序将每一对定子绕组连接到电源和接地之一来给每一对定子绕组通电。
[0088]
在另一实施例中,一种用于电动机的初始位置检测的方法包括通过依序给三对定
子绕组中的每一对通电和断电来确定每一对的三角接线电压,其中通过连接到相应的每一对的中心抽头的未通电定子绕组来测量三角接线电压。根据三个三角接线电压中的每一个的绝对值的最小值来确定最小三角接线电压,其中所述最小三角接线电压与不包括在相应的一对中的剩余定子绕组相关联。比较与最小三角接线电压不相关联的两个三角接线电压,以确定剩余定子绕组与电动机的转子的直(d)轴和转子的交(q)轴之一的接近度,其中d轴限定转子的最大磁阻的第一路径且q轴限定最大产生力矩的第二路径。
[0089]
用于电动机的初始位置检测的方法的替代实施例包括以下特征之一或以下特征的任何组合。依序给包括与最小三角接线电压相关联的剩余定子绕组的一对定子绕组通电和断电,以测量第一转子三角接线电压和第二转子三角接线电压,其中通过在与用于测量第二转子三角接线电压的第二电压脉冲相反的方向上施加第一电压脉冲来测量第一转子三角接线电压,且通过将第一转子三角接线电压与第二转子三角接线电压进行比较来确定转子的转子极性,从而测量第一转子三角接线电压和第二转子三角接线电压,其中通过在与用于测量第二转子三角接线电压的第二电压脉冲相反的方向上施加第一电压脉冲来测量第一转子三角接线电压,且通过将第一转子三角接线电压与第二转子三角接线电压进行比较来确定转子的转子极性。用于确定转子极性的第一电压脉冲和第二电压脉冲具有能够使与最小三角接线电压相关联的剩余定子绕组磁饱和的长持续时间。用于确定转子极性的第一电压脉冲和第二电压脉冲具有能够防止转子物理旋转的短持续时间。给三对定子绕组中的每一对通电包括通过相应的短路二极管连接将相应的每一对连接到电源和接地之一。
[0090]
虽然本文中参考具体实施例描述了本发明,但是可以在不脱离如所附权利要求书中所阐述的本发明的范围的情况下进行各种修改和改变。因此,说明书和附图应视为说明性而不是限制性意义,并且预期所有这些修改都包括在本发明的范围内。并不希望将本文中相对于特定实施例描述的任何优势、优点或针对问题的解决方案理解为任何或所有权利要求的关键、必需或必不可少的特征或元素。
[0091]
除非另外说明,否则如“第一”和“第二”等术语用于任意地区别此类术语所描述的元件。因此,这些术语未必旨在指示此类元件的时间上的优先级或其它优先级。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。