1.本发明涉及一种两个设备之间点云匹配并进行畸形校正的方法。
背景技术:
2.通常一个侦测系统中具有不止一个侦测设备,例如激光雷达、光电视觉探头等,不同设备探测目标的时候都是独立的探测,不同的设备间发现目标的能力以及识别真假目标的能力也不尽相同,因此不同探测设备之间联动显得尤为重要。例如由于激光雷达是全方位的探测设备,能够发现360度方位的目标,但是无法将发现目标的外形轮廓,目标大小等具体目标加以识别,因此需要通过光电视觉探头直接观察该目标,单光电视觉探头是单方向,高精度的观察设备,因此必须知道目标的精确位置才能将摄像头转到对应的位置进行观察追踪。
3.每个设备都具有自己的坐标系,如果需要将甲乙两个设备联动,务必需要将两个设备的点云进行匹配,即将以甲设备为原点的源坐标系与以乙设备为原点的目标坐标系进行坐标转换。然而由于生产、安装上的误差每个设备的坐标系都不是严格意义上的直角坐标系,因此在点云匹配后误差累计会造成较大的畸形。
技术实现要素:
4.有鉴于此,本发明提供一种两探测设备间点云匹配及畸形校正方法,通过不同设备之间的坐标转换并对进行畸形校正,提高不同设备之间的耦合精度。
5.为解决以上技术问题,本发明的技术方案为采用一种两探测设备间点云匹配及畸形校正方法,包括:进行源坐标系到目标坐标系的坐标转换;消除坐标转换后的形变。本发明的原理是在完成源坐标系到目标坐标系的坐标转换后,再进行形变的消除,用于消除设备在生产安装中造成的误差,避免误差累计,提高设备之间的耦合精度。
6.作为一种改进,所述进行源坐标系到目标坐标系的坐标转换是利用转换公式来实现的。
7.作为一种改进,所述转换公式为:
[0008][0009]
其中r
3x3
代表旋转矩阵,t
3x1
代表平移矩阵,s代表整体比例因子,o
1x3
为零向量;另有
[0010][0011]
t3×1=[t
x t
y tz]
t
[0012]
其中α、β、γ分别表示点沿x、y、z轴的旋转角度,t
x
、ty、tz分别表示点沿x、y、z轴的
平移量。
[0013]
作为另一种更进一步的改进,获取转换公式的步骤包括:利用源坐标系中的物体源点集以及该物体在目标坐标系中的实际点集计算源坐标系到目标坐标系的旋转矩阵和平移矩阵;利用旋转矩阵和平移矩阵对源点集进行转化得到目标点集并进行迭代计算最终获得最优旋转矩阵和最优平移矩阵;将最优旋转矩阵证和最优平移矩阵套用到转换公式中。
[0014]
作为一种改进,所述迭代计算包括:计算目标点集中的点与该物体在目标坐标系中的实际点集中的点之间的平均距离,如果平均距离大于或者等于阈值并且迭代次数小于或者等于预设次数,则利用目标点集和实际点集计算新的旋转矩阵和平移矩阵;利用新的旋转矩阵和平移矩阵对源点集进行转化得到新的目标点集并进行迭代计算,直到平均距离小于阈值或者迭代次数大于预设次数为止。
[0015]
作为一种改进,所述利用源坐标系中的物体源点集以及该物体在目标坐标系中的实际点集计算源坐标系到目标坐标系的旋转矩阵和平移矩阵为:设物体在源坐标系中的源点集p={pi|pi∈r3,i=1,2,
……
n},该物体在目标坐标系中的实际点集q={qj|qj∈r3,j=1,2,
……
m},旋转矩阵为r,平移矩阵为t,f(r,t)为源点集p在变换公式(r,t)下与目标点集q之间的误差,求满足min(f(r,t))的最优解(r,t)
[0016][0017]
本发明的有益之处在于:首先进行旋转平移矩阵的计算,通过旋转平移后的矩阵计算畸形形变矩阵,结合起来成为无线电映射到光电探头的坐标系中。经过实际测试,仅通过一次数据采集就完成了数据标定,大大提高了数据的不同设备之间的耦合性和联动性,为后续更精准的处置流程提供保证。
附图说明
[0018]
图1展示同一物体在无线电探测设备坐标系与光电视觉探头坐标系中点云的分布情况。
[0019]
图2展示理论上经过点云匹配后,源坐标系点云映射到目标坐标系后的点云与该物体实际在目标坐标系中的点云的分布情况。
[0020]
图3展示实际上经过点云匹配后,源坐标系点云映射到目标坐标系后的点云与该物体实际在目标坐标系中的点云的分布情况。
[0021]
图4展示通过形变消除后,物体从源坐标系映射到目标坐标系后的点云图像与该物体实际在目标坐标系中的点云分布情况。
[0022]
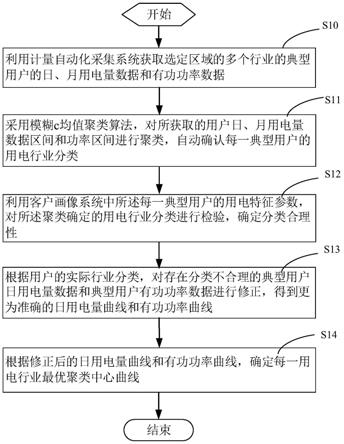
图5为本发明的流程图。
具体实施方式
[0023]
为了使本领域的技术人员更好地理解本发明的技术方案,下面结合具体实施方式对本发明作进一步的详细说明。
[0024]
本发明旨在解决两种设备之间匹配问题,通过不同设备之间的坐标转换,联动不
同设备去发现目标。增加系统的可用性和耦合性,为发现识别目标提供更精准的依据。
[0025]
设备对于目标的发现是基于显示三维世界中的真实目标在各自的观察坐标系中的映射。在真实的世界中建立观察坐标系,我们称为世界坐标系,那么被观察的物体在这个世界坐标系中则具有一个唯一的坐标与其对应。对于设备来说,无论是无线电探测设备还是雷达抑或是光电视觉探头,这个物体在这些设备中也具有一个唯一的坐标与其对应。为了建立两个设备之间的联系,需要将分别以两个设备为原点的坐标系进行映射,即本发明中所述的从源坐标系到目标坐标系的坐标转换,使得源坐标系中源点集的点在目标坐标系中均有唯一的点与之对应,从而实现两个设备的联动。
[0026]
本实施例举例无线电探测设备与光电视觉探头的坐标系映射。由于无线电探测设备是全方位的探测设备,能够发现360度方位的目标,但是无法将发现目标的外形轮廓,目标大小等具体目标加以识别,因此需要通过光电视觉抬头直接观察该目标。单光电视觉探头是单方向,高精度的观察设备,因此必须知道目标的精确位置才能将光电视觉探头转到对应的位置进行观察追踪。
[0027]
由于无线电探测设备与光电视觉探头安装位置、角度的不同,如图1所示,假设同一物体出现在二者的探测范围中形成点云,该物体的点云展现在以二者为原点的坐标系中的位置情况也不同,需要将无线电探测设备的坐标系(源坐标系)中的点云进行一定的旋转、平移、缩放等操作后映射到光电视觉探头的坐标系(目标坐标系)的点云与该物体实际在目标坐标系中点云分布重合,如图2所示。因此需要源坐标系和目标坐标系之间建立特定的坐标转换关系才能实现上述目的。而在建立关系后,在源坐标系中采集到的任意点云都能正确的映射到目标坐标系中对光电视觉探头进行指导。
[0028]
基于上述问题,本发明提供一种两探测设备间点云匹配及畸形校正方法,如图5所示包括:
[0029]
s1进行源坐标系到目标坐标系的坐标转换。
[0030]
步骤s1是利用转换公式来实现的;
[0031]
所述转换公式为:
[0032][0033]
其中r
3x3
代表旋转矩阵,t
3x1
代表平移矩阵,s代表整体比例因子,o
1x3
为零向量;另有
[0034][0035]
t3×1=[t
x t
y tz]
t
[0036]
其中α、β、γ分别表示点沿x、y、z轴的旋转角度,t
x
、ty、tz分别表示点沿x、y、z轴的平移量。
[0037]
获取转换公式的步骤包括:
[0038]
s11利用源坐标系中的物体源点集以及该物体在目标坐标系中的实际点集计算源坐标系到目标坐标系的旋转矩阵和平移矩阵;
[0039]
设物体在源坐标系中的源点集p={pi|pi∈r3,i=1,2,
……
n},该物体在目标坐标系中的实际点集q={qj|qj∈r3,j=1,2,
……
m},旋转矩阵为r,平移矩阵为t,f(r,t)为源点集p在变换公式(r,t)下与目标点集q之间的误差,求满足min(f(r,t))的最优解(r,t)
[0040][0041]
s12利用旋转矩阵和平移矩阵对源点集进行转化得到目标点集并进行迭代计算最终获得最优旋转矩阵和最优平移矩阵;
[0042]
所述迭代计算具体为:计算目标点集中的点与该物体在目标坐标系中的实际点集中的点之间的平均距离,如果平均距离大于或者等于阈值并且迭代次数小于或者等于预设次数,则利用目标点集和实际点集计算新的旋转矩阵和平移矩阵;利用新的旋转矩阵和平移矩阵对源点集进行转化得到新的目标点集并进行迭代计算,直到平均距离小于阈值或者迭代次数大于预设次数为止。
[0043]
s13将最优旋转矩阵证和最优平移矩阵套用到转换公式中。
[0044]
s2消除坐标转换后的形变。
[0045]
如图3所示,经过源坐标系到目标坐标系的坐标转换,物体从源坐标系映射到目标坐标系中的点云图像与该物体实际在目标坐标系中的点云图像仍然有一定的偏差。
[0046]
通过观察旋转平移点云匹配的情况后,发现在不同方位角的时候源坐标系和目标坐标系的高度差是不相同的。也就是说无线电探测设备的坐标系和光电视觉探头的坐标系之间并不是严格的直角坐标系,他们的各自的坐标系中存在坐标系形变。
[0047]
形变的消除可通过对坐标进行线性拟合来进行。针对实验结果的观察,发现误差量基本都是在z方向上,因此对z方向的偏置进行3次方拟合,拟合公式为:
[0048][0049]
其中x0,y0,z0为目标坐标系的坐标,x1,y1,z1为源坐标系的坐标,通过线性回归方程计算出k:{k
11
,k
12
,
……k39
}的值。
[0050]
计算出k:{k
11
,k
12
,
……k39
}的值后,通过上述方程对通过平移矩阵和旋转矩阵转换后的坐标进行纠偏,消除形变。如图4所示,形变消除后,物体从源坐标系映射到目标坐标系中的点云图像与该物体实际在目标坐标系中的点云图像已经非常接近。
[0051]
以上仅是本发明的优选实施方式,应当指出的是,上述优选实施方式不应视为对本发明的限制,本发明的保护范围应当以权利要求所限定的范围为准。对于本技术领域的普通技术人员来说,在不脱离本发明的精神和范围内,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。