一种基于模糊pid控制的一体化热开水保温专用运输车防侧倾控制装置及控制方法
技术领域
1.本发明涉及一体化热开水保温专用运输车领域,特别涉及一种基于模糊pid控制的一体化热开水保温专用运输车防侧倾控制装置及控制方法。
背景技术:
2.一体化热开水保温专用运输车由于具有高效率、低成本等特点,近年来逐渐成为公路运输中液体货物载运的主体。但是一体化热开水保温专用运输车与常规车辆相比,其质心相对较高,重量和体积更大,且罐内液体和车体运动也相互影响。这就使得车辆在遭遇紧急状况或转弯过程中,有较大概率发生侧翻、摆振及折叠等事故。由于运输的液体大部分都具有易燃、易爆和有毒特点。一体化热开水保温专用运输车一旦发生侧翻事故,极易产生泄露、燃烧和爆炸等危险状况,造成人身财产的损失和环境破坏。近年来,罐车侧翻的事件频频发生,对于高效精准的一体化热开水保温专用运输车防侧倾技术的呼声也越来越高。
技术实现要素:
3.本发明所要解决的技术问题是提供一种一体化热开水保温专用运输车防侧倾控制装置、控制方法及控制流程,解决了一体化热开水保温专用运输车在遭遇紧急状况或转弯过程中一体化热开水保温专用运输车侧倾幅度过大的问题。
4.为实现上述目的,本发明提供的一种基于模糊pid控制的一体化热开水保温专用运输车防侧倾控制装置、控制方法及工作流程采用的技术方案是:一种基于模糊pid控制的一体化热开水保温专用运输车防侧倾控制装置包括一体化车架、液罐和罐体姿态调整装置组件与罐体固定架,所述一体化车体用于支撑整车的重量,所述的液罐固定于一体化车体上,用于储存液体;所述的罐体姿态调整装置组件,包括轮胎负载传感器、布置在罐体两侧与车架连接处的电机、推杆和控制器;所述的控制器,用于控制液罐的质心位置;上述数据实时输入控制器中,控制器通过上述数据,基于建立好的一体化热开水保温专用运输车防侧倾模糊pid控制模型,实现动态的调节一体化车架姿态,保障一体化热开水保温专用运输车行驶的稳定性。
5.为达到上述目的,本发明提供如下的一体化热开水保温专用运输车防侧倾模糊pid控制模型搭建技术方法,如下所示:
6.(1)明确一体化热开水保温专用运输车侧翻状况表征参数,用于计算一体化热开水保温专用运输车的侧翻稳定性:
7.当一体化热开水保温专用运输车发生一定的侧倾时,一体化热开水保温专用运输车车轮的载荷会发生转移,该现象被称为由侧倾引起的横向载荷转移,通过计算其横向载荷转移率来确定一体化热开水保温专用运输车当前所处的状态。横向载荷转移率k的定义为:
[0008][0009]
式中,f
zl
,f
zr
分别表示一体化热开水保温专用运输车左右侧的垂直载荷,n;k在[-1,1]范围内变化。当k=0时,两侧载荷相等,一体化热开水保温专用运输车正常行驶;当k=-1或1时,一体化热开水保温专用运输车一侧载荷为0,表明一体化热开水保温专用运输车可能发生侧倾事故。
[0010]
(2)设定模糊pid控制器的两个输入量分别为设定横向载荷转移率与实际横向载荷转移率的误差 e(k)与ec(k):
[0011]
e(k)=t
ref
(k)-t(k)
[0012][0013]
将一体化热开水保温专用运输车不同位置的推杆高度所需的电机转速与行程为作为输出变量
[0014]
(3)选定输入变量的模糊集合
[0015]
选定7个模糊集合,即nb(负大)、nm(负中)、ns(负小)、zo(零)、ps(正小)、 pm(正中)和pb(正大);
[0016]
(4)确定模糊集合的隶属度函数
[0017]
输入变量e(k)与ec(k)的范围均为-1至1,故模糊集合对应的隶属函数定义如下:
[0018][0019][0020][0021][0022][0023][0024][0025]
上式中,f
nb
(x)为模糊集合nb的隶属度函数,f
nm
(x)为模糊集合nm的隶属度函数,f
ns
(x) 为模糊集合ns的隶属度函数,f
ze
(x)为模糊集合zo的隶属度函数,f
ps
(x)为模糊集合ps的隶属度函数,f
pm
(x)为模糊集合pm的隶属度函数,f
pb
(x)为模糊几何pb的隶属度函数,
以上7个隶属度函数数值均保留小数点后两位数字,x表示各个输入变量;
[0026]
(5)模糊推理
[0027]
本发明中对于罐车侧倾状态的控制采用的模糊pid控制,以e(k)与ec(k)为输入,以pid控制的参数的修正量δk
p
、δki与δkd作为控制器的输出,根据整定定律整理控制规则,每个控制器的输出规则均有49个规则,共计147个规则,具体模糊控制规则内容如图5、图6和图7所示;
[0028]
(6)确定解模糊策略
[0029]
前述步骤中得到的结果是模糊的,而对于实际模糊控制系统所输出给电机推杆高度控制装置的是一个精确量,因此需要将模糊量转换成精确量。本发明选择采用重心法进行去模糊化动作,具体如下所示:
[0030][0031]
式中,z0为模糊控制器输出量解模糊后的精确值;zi为模糊控制量论域内的值;μc(zi)为zi的隶属度值。
[0032]
本发明提供如下工作流程:
[0033]
在一体化热开水保温专用运输车行驶过程中,遇到紧急状况或高速过弯时,模糊pid控制器根据两侧轮胎的载荷传感器测得的载荷计算一体化热开水保温专用运输车的横向载荷转移率k,将k与目标横向转移率k0的误差与误差变化率e(k)与ec(k)作为输入进行模糊pid控制,结合其他参数动态调节控制一体化热开水保温专用运输车一体化车架左右两侧的推杆高度来调整罐车重心,最终达到一体化热开水保温专用运输车侧倾的有效抑制。
[0034]
与现有技术相比,本发明具有如下有点和有益效果:
[0035]
1.本发明的防侧倾控制方法,使用的装置体积小便于安装且执行动作快,成本低,便于推广应用;
[0036]
2.本发明中模糊pid控制器需要的参数较少,计算速度较快,且精度较高,环境适应性强;
[0037]
3.本发明高度适用于一体化热开水保温专用运输车,不需要对一体化热开水保温专用运输车进行额外的改造与重新设计。
附图说明
[0038]
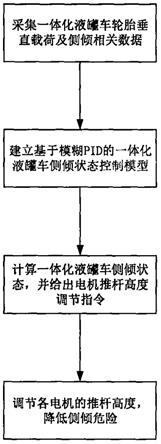
图1为本发明提供的防侧倾方法工作流程图;
[0039]
图2、3分别为本发明提供的一体化热开水保温专用运输车中的罐体姿态调整装置安装位置示意图侧视图与后视图;
[0040]
图4为本发明提供的模糊pid结构图;
[0041]
图5、6、7为本发明提供的模糊集合隶属函数图。
具体实施方式
[0042]
以下将结合具体实施例对本发明提供的技术方案进行详细说明,应理解下述具体实施方式仅用于本发明而不限制于本发明的范围。
[0043]
本发明提出了一种基于模糊pid控制的一体化热开水保温专用运输车防侧倾控制装置、控制方法及工作流程,首先明确一体化热开水保温专用运输车侧倾程度表征参数及其计算方法,然后建立一体化热开水保温专用运输车防侧倾模糊pid控制器模型,最后计算出为使一体化热开水保温专用运输车稳定所需要的不同位置电机所需要的推动的高度,控制一体化热开水保温专用运输车侧倾程度,达到预防和较少一体化热开水保温专用运输车侧倾事故的目的。一种基于模糊pid控制的一体化热开水保温专用运输车防侧倾控制装置包括一体化车架1、液罐2和罐体姿态调整装置组件3与罐体固定架4,所述一体化车体用于支撑整车的重量,所述的液罐固定于一体化车体上,用于储存液体;所述的罐体姿态调整装置组件,包括轮胎负载传感器、布置在罐体两侧与车架连接处的电机5、推杆6和控制器;所述的控制器,用于控制液罐的质心位置;上述数据实时输入控制器中,控制器通过上述数据,基于建立好的一体化热开水保温专用运输车防侧倾模糊pid控制模型,实现动态的调节一体化车架姿态,保障一体化热开水保温专用运输车行驶的稳定性。
[0044]
一体化热开水保温专用运输车防侧倾的工作方法如图1所示,包括以下步骤:
[0045]
(1)明确一体化热开水保温专用运输车侧翻状况表征参数,用于计算一体化热开水保温专用运输车的侧翻稳定性:
[0046]
当一体化热开水保温专用运输车发生一定的侧倾时,一体化热开水保温专用运输车车轮的载荷会发生转移,该现象被称为由侧倾引起的横向载荷转移,通过计算其横向载荷转移率来确定一体化热开水保温专用运输车当前所处的状态。横向载荷转移率k的定义为:
[0047][0048]
(2)设定模糊pid控制器的两个输入量分别为设定横向载荷转移率与实际横向载荷转移率的误差 e(k)与ec(k):
[0049]
e(k)=t
ref
(k)-t(k)
[0050][0051]
将一体化热开水保温专用运输车不同位置的推杆高度所需的电机转速与行程为作为输出变量;
[0052]
(3)选定输入变量的模糊集合
[0053]
选定7个模糊集合,即nb(负大)、nm(负中)、ns(负小)、zo(零)、ps(正小)、pm(正中)和pb(正大);
[0054]
(4)确定模糊集合的隶属度函数
[0055]
输入变量e(k)与ec(k)的范围均为-1至1,故模糊集合对应的隶属函数定义如下:
[0056]
[0057][0058][0059][0060][0061][0062][0063]
上式中,f
nb
(x)为模糊集合nb的隶属度函数,f
nm
(x)为模糊集合nm的隶属度函数,f
ns
(x)为模糊集合 ns的隶属度函数,f
ze
(x)为模糊集合zo的隶属度函数,f
ps
(x)为模糊集合ps的隶属度函数,f
pm
(x)为模糊集合pm的隶属度函数,f
pb
(x)为模糊几何pb的隶属度函数,以上7个隶属度函数数值均保留小数点后两位数字,x表示各个输入变量;
[0064]
(5)模糊推理
[0065]
本发明中对于罐车侧倾状态的控制采用的模糊pid控制,以e(k)与ec(k)为输入,以pid控制的参数的修正量δk
p
、δki与δkd作为控制器的输出,根据整定定律整理控制规则,每个控制器的输出规则均有49个规则,共计147个规则,具体模糊控制规则内容如图5、图6和图7所示;
[0066]
(6)确定解模糊策略
[0067]
前述步骤中得到的结果是模糊的,而对于实际模糊控制系统所输出给电机推杆位置调节装置的是一个精确量,因此需要将模糊量转换成精确量。本发明选择采用重心法进行去模糊化动作,具体如下所示:
[0068][0069]
式中,z0为模糊控制器输出量解模糊后的精确值;zi为模糊控制量论域内的值;μc(zi)为zi的隶属度值。
[0070]
通过本技术方案可以有效调节一体化热开水保温专用运输车的质心位置,具有优异动态响应性能,最大程度上避免一体化热开水保温专用运输车在高速过弯或紧急状况时的操纵稳定性。
[0071]
尽管已经示出和描述本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
