1.本发明涉及一种将收容在碗中的多个元件以预定的姿势逐个供给的碗式供料器。
背景技术:
2.在下述专利文献中,记载了与将收容在碗中的多个元件以预定的姿势逐个供给的碗式供料器相关的技术。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2004-182466号公报
6.专利文献2:日本特开2013-170011号公报
技术实现要素:
7.发明所要解决的课题
8.在本说明书中,以通过碗式供料器恰当地供给元件为课题。
9.用于解决课题的技术方案
10.为了解决上述课题,本说明书公开了一种碗式供料器,具备:碗,进行振动以搬运所收容的多个元件;供给部,将所述多个元件以预定的姿势逐个供给;搬运部,进行振动以从所述碗向所述供给部搬运元件;第一检测传感器,检测收容在所述碗中的元件的有无;第二检测传感器,检测所述搬运部的元件的有无;以及控制装置,单独地控制所述碗和所述搬运部的工作。
11.发明效果
12.在本公开中,在碗式供料器中配设有检测收容在碗中的元件的有无的第一检测传感器和检测搬运部的元件的有无的第二检测传感器,单独地控制碗和搬运部的工作。由此,能够通过碗式供料器恰当地供给元件。
附图说明
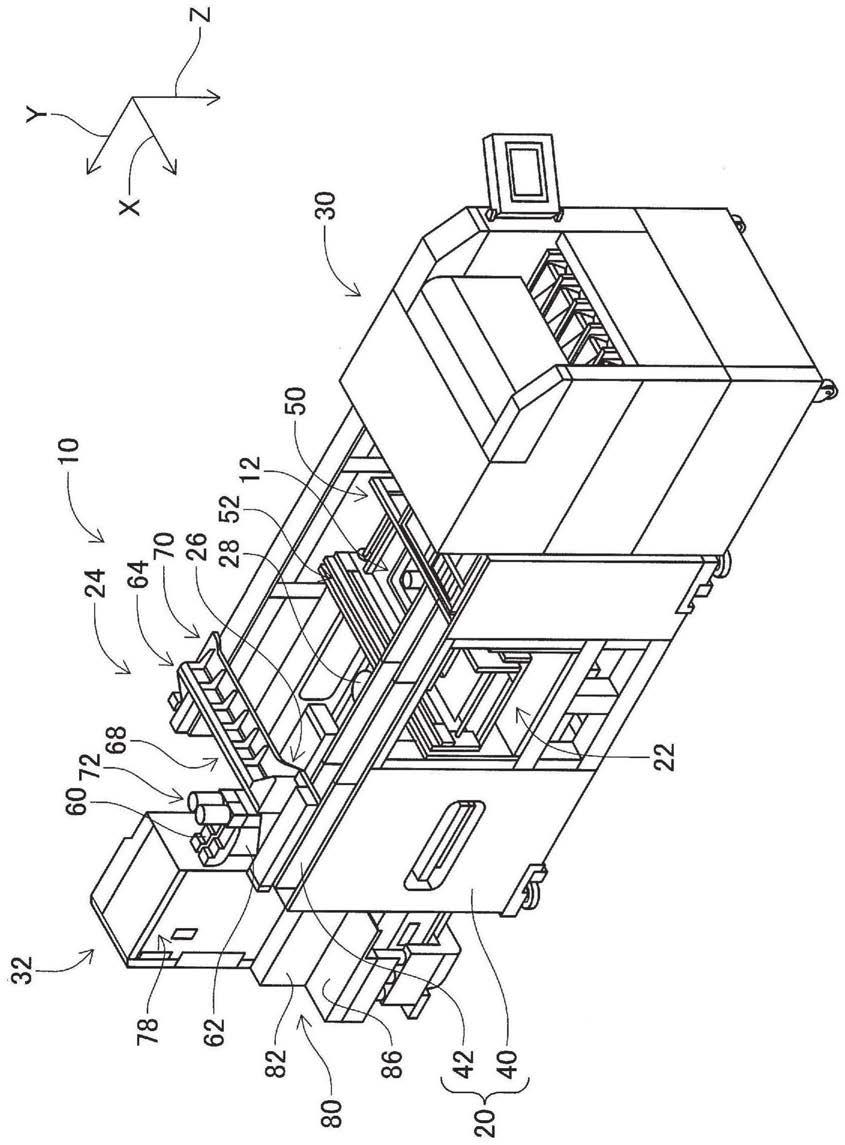
13.图1是表示元件安装装置的立体图。
14.图2是表示元件装配装置的立体图。
15.图3是表示碗式供料器的立体图。
16.图4是表示碗式供料器的侧视图。
17.图5是表示碗式供料器的俯视图。
18.图6是表示第一搬运通道和第二搬运通道的放大图。
19.图7是表示第一搬运通道、第二搬运通道以及供给块的放大图。
20.图8是表示控制装置的框图。
21.附图标记说明
22.36:控制装置
23.82:碗式供料器
24.104:碗
25.106:第一搬运通道(搬运部)
26.108:第二搬运通道(搬运部)
27.110:供给块(供给部)
28.160:检测传感器(第一检测传感器)
29.170:检测传感器(第二检测传感器)
30.180:检测传感器(第二检测传感器)
31.190:检测传感器(第三检测传感器)
具体实施方式
32.以下,作为用于实施本发明的方式,参照附图详细地说明本发明的实施例。
33.在图1中示出元件安装装置10。元件安装装置10是用于执行元件相对于电路基材12的安装作业的装置。元件安装装置10具备装置主体20、基材搬运保持装置22、元件装配装置24、拍摄装置26、28、散装元件供给装置30、元件供给装置32以及控制装置(参照图8)36。此外,作为电路基材12,列举有电路基板、三维构造的基材等,作为电路基板,列举有印刷布线板、印刷电路板等。
34.装置主体20由框架40和架设于该框架40上的梁42构成。基材搬运保持装置22配设在框架40的前后方向的中央,具有搬运装置50和夹持装置52。搬运装置50是搬运电路基材12的装置,夹持装置52是保持电路基材12的装置。由此,基材搬运保持装置22搬运电路基材12,并且在预定的位置固定地保持电路基材12。此外,在以下的说明中,将电路基材12的搬运方向称为x方向,将与该方向成直角的水平的方向称为y方向,将铅垂方向称为z方向。即,元件安装装置10的宽度方向是x方向,前后方向是y方向。
35.元件装配装置24配设在梁42上,具有两台作业头60、62和作业头移动装置64。如图2所示,在各作业头60、62的下端面能够装卸地设有吸嘴66,通过吸嘴66来保持元件。另外,作业头移动装置64具有x方向移动装置68、y方向移动装置70以及z方向移动装置72。并且,两台作业头60、62通过x方向移动装置68和y方向移动装置70一体地向框架40上的任意的位置移动。另外,不使用工具而以单触的方式将各作业头60、62能够装卸地定位并装配于滑动件74、76,z方向移动装置72使滑动件74、76单独地在上下方向上移动。即,作业头60、62通过z方向移动装置72而单独地在上下方向上移动。
36.拍摄装置26以在铅垂轴线上朝向下方的状态安装于滑动件74,与作业头60一起在x方向、y方向以及z方向上移动。由此,拍摄装置26对框架40上的任意的位置进行拍摄。如图1所示,拍摄装置28以在铅垂轴线上朝向上方的状态配设在框架40上的基材搬运保持装置22与元件供给装置32之间。由此,拍摄装置28对由作业头60、62的吸嘴66保持的元件进行拍摄。此外,拍摄装置26、28为二维相机,拍摄二维图像。
37.散装元件供给装置30配设于框架40的前后方向上的一方侧的端部。散装元件供给装置30是使分散存在的状态下的多个元件整齐排列、并在整齐排列的状态下供给元件的装置。即,是使任意姿势的多个元件整齐排列为预定的姿势并供给预定的姿势的元件的装置。
38.元件供给装置32配设在框架40的前后方向上的另一方侧的端部。元件供给装置32
具有托盘型元件供给装置78和供料器型元件供给装置80。托盘型元件供给装置78是供给载置于托盘上的状态下的元件的装置。供料器型元件供给装置80是通过碗式供料器82来供给元件的装置、通过带式供料器来供给元件的装置等。以下,对碗式供料器82的构造进行说明。
39.碗式供料器82利用固定设置于框架40的另一方侧的端部的供料器保持台86所具备的全部插槽中的多个插槽,在不使用工具的情况下能够装卸地定位并装配。碗式供料器82是将收容在碗形状的碗中的电子元件以排成一列的状态搬运至供给位置、并在供给位置处逐个供给的供给装置。
40.如图3至图5所示,碗式供料器82具备供料器主体100、元件料斗102、碗104、第一搬运通道106、第二搬运通道108以及供给块110。此外,在以下的说明中,将从元件料斗102朝向供给块110的方向记载为前方,将从供给块110朝向元件料斗102的方向记载为后方。另外,图3是从斜上方的视点表示碗式供料器82的立体图,图4是从侧方的视点表示碗式供料器82的侧视图,图5是从上方的视点表示碗式供料器82的俯视图。
41.碗式供料器82在供料器主体100中装配于供料器保持台86,在供料器主体100的上表面配设有元件料斗102、碗104、第一搬运通道106、第二搬运通道108以及供给块110。元件料斗102呈大致圆柱形状,配设在供料器主体100的上表面的后方侧的端部。元件料斗102被设为呈碗形状凹陷的凹部,该凹部作为元件投入部112发挥功能。另外,在元件料斗102的上缘的前端部形成有朝向前方突出的突出部114。并且,在该突出部114的上表面以沿前后方向延伸的方式形成有槽116,该槽116在前端向突出部114的前端开口,在后端向元件投入部112开口。此外,槽116的宽度尺寸比电子元件的宽度尺寸稍大。
42.另外,在元件投入部112的内壁面形成有螺旋形状的搬运路118,该搬运路118从元件投入部112的底面起一边围绕元件投入部112的内壁面一边到达槽116的后端的开口。另外,元件料斗102在供料器主体100的上表面被保持为能够在前后方向以及左右方向上振动,通过电磁马达(参照图8)120的工作而在前后方向以及左右方向上扭转振动。此外,通过电磁马达120的工作,元件料斗102以非常小的振幅高频地振动,从而使投入到元件投入部112的元件沿搬运路118向上方移动。
43.另外,碗104也呈大致圆柱形状,在供料器主体100的上表面配设于元件料斗102的前方侧。此外,碗104的高度尺寸比元件料斗102的高度尺寸小,碗104以碗104的上表面位于从元件料斗102的上端向前方突出的突出部114的前端的下方的方式配设于元件料斗102的前方侧。另外,碗104的上表面也被设为呈碗形状凹陷的凹部,该凹部作为元件收容部122发挥功能。
44.在该元件收容部122的内壁面也形成有螺旋形状的搬运路124,该搬运路124从元件收容部122的底面起一边围绕元件收容部122的内壁面一边在碗104的上缘的侧方侧开口。另外,碗104在供料器主体100的上表面也被保持为能够在前后方向以及左右方向上振动,通过电磁马达(参照图8)128的工作而在前后方向以及左右方向上扭转振动。此外,同样地,通过电磁马达128的工作,碗104以非常小的振幅高频地振动,从而使投入到元件收容部122中的元件沿搬运路124向上方移动。
45.另外,第一搬运通道106呈大致棒形状,以在供料器主体100的上表面沿前后方向延伸的方式被支撑腿130支撑。此外,第一搬运通道106的后端朝向在碗104的上缘的侧方部
开口的搬运路124延伸。另外,在第一搬运通道106的上表面以沿前后方向延伸的方式形成有搬运槽132,搬运槽132在前端向第一搬运通道106的前端开口,在后端向第一搬运通道106的后端开口。并且,搬运槽132的后端与在碗104的上缘的侧方部开口的搬运路124隔着微小的间隙而对置。即,搬运槽132的后端开口的第一搬运通道106的后端与搬运路124开口的碗104的上缘的侧方部隔着微小的间隙而对置。此外,搬运槽132的宽度尺寸比电子元件的宽度尺寸稍大。另外,第一搬运通道106被支撑腿130保持为能够在前后方向上振动,通过电磁马达(参照图8)136的工作而在前后方向上振动。此外,同样地,通过电磁马达136的工作,第一搬运通道106以非常小的振幅高频地振动,从而使排列在第一搬运通道106的搬运槽132中的元件朝向前方移动。
46.顺便说一下,第一搬运通道106的后端与碗104的上缘的侧方部之间的间隙比将第一搬运通道106的振幅与碗104的振幅相加所得的幅度大。由此,在碗104以及第一搬运通道106振动时,碗104与第一搬运通道106不抵接。另外,在后面进行详细说明,从碗104的搬运路124向第一搬运通道106的搬运槽132搬运电子元件,但是第一搬运通道106的后端与碗104的上缘的侧方部的间隙比该电子元件的外部尺寸小。由此,在从碗104的搬运路124向第一搬运通道106的搬运槽132搬运电子元件时,防止电子元件的脱落。
47.另外,第二搬运通道108也呈大致棒形状,以在供料器主体100的上表面沿前后方向延伸的方式被支撑腿140支撑。此外,第二搬运通道108被配设为从第一搬运通道106的前端朝向前方呈直线状延伸,第一搬运通道106和第二搬运通道108位于一条直线上。即,第二搬运通道108被配设为在后端与第一搬运通道106的前端对置,并与该第一搬运通道106位于一条直线上。但是,第二搬运通道108位于比第一搬运通道106稍靠下方的位置。
48.另外,在第二搬运通道108的上表面也以沿前后方向延伸的方式形成有搬运槽144,搬运槽144在前端向第二搬运通道108的前端开口,在后端向第二搬运通道108的后端开口。并且,如图6所示,搬运槽144的后端与第一搬运通道106的搬运槽132的前端隔着微小的间隙而对置。即,搬运槽144的后端开口的第二搬运通道108的后端与搬运槽132的前端开口的第一搬运通道106的前端隔着微小的间隙而对置。此外,搬运槽144的宽度尺寸被设为与搬运槽132的宽度尺寸大致相同。另外,第二搬运通道108被支撑腿140保持为能够在前后方向上振动,通过电磁马达(参照图8)146的工作而在前后方向上振动。此外,同样地,通过电磁马达146的工作,第二搬运通道108以非常小的振幅高频地振动,从而使排列在第二搬运通道108的搬运槽144中的元件朝向前方移动。
49.顺便说一下,第二搬运通道108的后端与第一搬运通道106的前端之间的间隙比将第二搬运通道108的振幅与第一搬运通道106的振幅相加所得的宽度大。由此,在第一搬运通道106以及第二搬运通道108振动时,第一搬运通道106与第二搬运通道108不抵接。另外,在后面详细说明,从第一搬运通道106的搬运槽132向第二搬运通道108的搬运槽144搬运电子元件,但是第一搬运通道106的前端与第二搬运通道108的后端之间的间隙比该电子元件的外部尺寸小。由此,在从第一搬运通道106的搬运槽132向第二搬运通道108的搬运槽144搬运电子元件时,防止电子元件的脱落。
50.另外,供给块110在供料器主体100的上表面,在与第二搬运通道108的前端对置的位置被支撑腿150支撑。此外,供给块110的上表面位于与第二搬运通道108的上表面大致相同的高度。并且,如图7所示,在供给块110的上表面形成有凹部152。该凹部152的宽度尺寸
比电子元件的宽度尺寸稍大,凹部152的长度尺寸比电子元件的长度尺寸稍大。由此,在凹部152中定位并收容一个电子元件。
51.另外,凹部152在供给块110的与第二搬运通道108对置的后端面开口,该凹部152的开口与第二搬运通道108的搬运槽144的前端的开口隔着微小的间隙而对置。此外,供给块110的后端面与第二搬运通道108的前端之间的间隙比第二搬运通道108的振幅大。由此,在第二搬运通道108振动时,供给块110与第二搬运通道108不抵接。另外,在后面进行详细说明,从第二搬运通道108的搬运槽144向供给块110的凹部152搬运电子元件,但是供给块110的后端面与第二搬运通道108的前端之间的间隙比该电子元件的外部尺寸小。由此,在从第二搬运通道108的搬运槽144向供给块110的凹部152搬运电子元件时,防止电子元件的脱落。
52.另外,如图3以及图4所示,在碗104的上方配设有检测传感器160。检测传感器160是限定反射型的传感器,从碗104的上方朝向碗104的元件收容部122的底面照射光。并且,从检测传感器160照射的光被收容在元件收容部122中的元件反射,通过由检测传感器160接收该反射的光而对位于碗104内的电子元件进行检测。另一方面,在碗104内没有适当的数量的元件的情况下,所照射的光不会被电子元件反射,因此不会接收检测传感器160反射光。即,检测传感器160检测收容在碗104的元件收容部122中的电子元件是否具有适当的数量。
53.另外,如图7所示,在第一搬运通道106配设有圆筒状的检测传感器170。检测传感器170是透过型的传感器,由投光部172和受光部174构成。投光部172和受光部174以夹着搬运槽132的状态相互对置地配设。投光部172和受光部174埋设于第一搬运通道106,从投光部172照射的光经由搬运槽132被受光部174接收。因此,在投光部172与受光部174之间的搬运槽132中存在有电子元件的情况下,从投光部172照射的光被该电子元件遮挡,因此受光部174不接收由投光部172照射的光。另一方面,在投光部172与受光部174之间的搬运槽132中没有电子元件的情况下,受光部174接收从投光部172照射的光。由此,检测传感器170基于受光部174的受光的有无而对搬运槽132的配置有检测传感器的位置处的电子元件的有无进行检测。
54.另外,在第二搬运通道108也配设有透过型的圆筒状的检测传感器180,该检测传感器180由投光部182和受光部184构成。投光部182与受光部184以夹着搬运槽144的状态相互对置地配设。投光部182和受光部184埋设于第二搬运通道108,从投光部182照射的光经由搬运槽144被受光部184接收。因此,在投光部182与受光部184之间的搬运槽144中存在有电子元件的情况下,从投光部182照射的光被该电子元件遮挡,因此受光部184不接收由投光部182照射的光。另一方面,在投光部182与受光部184之间的搬运槽144中没有电子元件的情况下,受光部184接收从投光部182照射的光。由此,检测传感器180基于受光部184的受光的有无而对搬运槽144的配置有检测传感器的位置处的电子元件的有无进行检测。
55.另外,在供给块110也配设有透过型的圆筒状的检测传感器190,该检测传感器190由投光部192和受光部194构成。投光部192和受光部194以夹着凹部152的状态相互对置地配设。投光部192和受光部194埋设于供给块110,从投光部192照射的光经由凹部152被受光部194接收。因此,在投光部192与受光部194之间的凹部152中存在有电子元件的情况下,从投光部192照射的光被该电子元件遮挡,因此受光部194不接收由投光部192照射的光。另一
方面,在投光部192与受光部194之间的凹部152中没有电子元件的情况下,受光部194接收从投光部192照射的光。由此,检测传感器190基于受光部194的受光的有无而检测凹部152的电子元件的有无。
56.另外,如图8所示,控制装置36具备控制器200、多个驱动电路202、图像处理装置206。多个驱动电路202与上述搬运装置50、夹持装置52、作业头60、62、x方向移动装置68、y方向移动装置70、z方向移动装置72、托盘型元件供给装置78、电磁马达120、128、136、146、散装元件供给装置30连接。控制器200具备cpu、rom、ram等,以计算机为主体,与多个驱动电路202连接。由此,基材搬运保持装置22、元件装配装置24等的工作由控制器200控制。另外,控制器200也与图像处理装置206连接。图像处理装置206对由拍摄装置26、28获得的图像数据进行处理,控制器200从图像数据取得各种信息。进而,控制器200还与碗式供料器82的检测传感器160、170、180、190连接。由此,控制器200取得基于检测传感器160、170、180、190的检测结果。
57.元件安装装置10通过上述结构,对被基材搬运保持装置22保持的电路基材12进行元件的装配作业。具体而言,电路基材12被搬运至作业位置,在该位置被夹持装置52固定地保持。接着,拍摄装置26向电路基材12的上方移动,对电路基材12进行拍摄。由此,获得与电路基材12的保持位置的误差相关的信息。另外,散装元件供给装置30或者元件供给装置32在预定的供给位置供给元件。此外,元件供给装置30的碗式供料器82对元件的供给的详细说明见后述。并且,作业头60、62中的任一个向元件的供给位置的上方移动,通过吸嘴66来保持元件。接着,保持有元件的作业头60、62向拍摄装置28的上方移动,通过拍摄装置28对被吸嘴66保持的元件进行拍摄。由此,获得与元件的保持位置的误差相关的信息。并且,保持有元件的作业头60、62向电路基材12的上方移动,对所保持的元件进行电路基材12的保持位置的误差、元件的保持位置的误差等的修正,并装配于电路基材12上。
58.此外,在碗式供料器82中,由作业者将电子元件投入到元件料斗102的元件投入部112中,该被投入的电子元件通过元件料斗102、碗104、第一搬运通道106、第二搬运通道108的反复振动而被搬运至供给块110的凹部152,且电子元件在该凹部152中被供给。
59.详细而言,作业者向元件料斗102的元件投入部112投入多个电子元件。此外,向元件投入部112投入的电子元件例如是作为标准而被称为0603的一边不足1mm的非常小的元件。并且,以限定反射型的传感器无法检测到收容在元件收容部122中的元件为触发,被投入到元件投入部112的电子元件通过元件料斗102的电磁马达120的工作而沿形成于元件投入部112的搬运路118在元件投入部112的内壁面上呈螺旋状上升。
60.详细而言,通过电磁马达120的工作,元件料斗102如上述那样以高频在前后方向以及左右方向上扭转振动。即,元件料斗102在扭转方向上以高频反复振动。此时,被投入到元件投入部112的电子元件通过元件料斗102朝向扭转方向的反复振动所引起的离心力而被朝向元件投入部112的内壁面施力。由此,被投入到元件投入部112的电子元件沿搬运路118在元件投入部112的内壁面上呈螺旋状上升。并且,沿搬运路118上升的电子元件到达形成于元件料斗102的突出部114的槽116,从槽116的前端的开口落下而向碗供给电子元件,直到限定反射型的传感器检测到元件为止。
61.并且,由于碗104的元件收容部122位于元件料斗102的突出部114的前端的下方,因此从槽116的前端落下的电子元件被收容在碗104的元件收容部122中。接着,收容在碗
104的元件收容部122中的电子元件通过碗104的电磁马达128的工作而沿形成于元件收容部122中的搬运路124在元件收容部122的内壁面上呈螺旋状上升。
62.详细而言,通过电磁马达128的工作,碗104如上述那样以高频在前后方向以及左右方向上扭转振动。即,碗104在扭转方向上以高频反复振动。此时,收容在元件收容部122中的电子元件通过碗104朝向扭转方向的反复振动所引起的离心力而被朝向元件收容部122的内壁面施力。由此,收容在元件收容部122中的电子元件沿搬运路124在元件收容部122的内壁面上呈螺旋状上升。
63.并且,沿搬运路124上升的电子元件到达搬运路124的上端,进入与该搬运路124的上端对置的第一搬运通道106的搬运槽132。即,沿搬运路124上升的电子元件从搬运路124的上端被送入第一搬运通道106的搬运槽132。此外,由于搬运槽132的宽度尺寸比电子元件的宽度尺寸稍大,因此电子元件以电子元件的宽度方向与搬运槽132的宽度方向一致的姿势进入搬运槽132。即,电子元件以将电子元件的长度方向设为搬运槽132延伸的方向、将电子元件的宽度方向设为搬运槽132的宽度方向的姿势进入搬运槽132。另外,随着碗104的电磁马达128的工作,电子元件依次从碗104的搬运路124进入第一搬运通道106的搬运槽132,因此在搬运槽132中,多个电子元件成为以上述预定的姿势排成一列的状态。此时,进入到搬运槽132中的电子元件被新进入的电子元件从碗104的搬运路124向第一搬运通道106的搬运槽132按压,从而彼此相邻的电子元件无间隙地紧贴。
64.这样,在以预定的姿势排成一列的状态下进入到搬运槽132中的多个电子元件通过第一搬运通道106的电磁马达136的工作而被朝向第一搬运通道106的前端搬运。详细而言,通过电磁马达136的工作,第一搬运通道106如上述那样以高频在前后方向上反复振动。此时,调整电磁马达136的振动频率,以使进入到搬运槽132中的电子元件朝向斜前方浮起。因此,第一搬运通道106以高频在前后方向上反复振动,从而进入到搬运槽132中的电子元件一点一点地朝向前方行进。由此,在第一搬运通道106中,在搬运槽132的内部,多个电子元件以排成一列的状态被从后端朝向前端搬运。
65.并且,在第一搬运通道106中被搬运至搬运槽132的前端的电子元件进入第二搬运通道108的搬运槽144的后端。即,被搬运至搬运槽132的前端的电子元件从该搬运槽132的前端被送入第二搬运通道108的搬运槽144的后端。此外,由于搬运槽144的宽度尺寸比电子元件的宽度尺寸稍大,因此电子元件以电子元件的宽度方向与搬运槽144的宽度方向一致的姿势进入搬运槽144。即,电子元件以将电子元件的长度方向设为搬运槽144延伸的方向、将电子元件的宽度方向设为搬运槽144的宽度方向的姿势进入搬运槽144。另外,随着第一搬运通道106的电磁马达136的工作,电子元件依次从第一搬运通道106的搬运槽132进入第二搬运通道108的搬运槽144,因此在搬运槽144中,多个电子元件成为以上述预定的姿势排成一列的状态。此时,进入到搬运槽144中的电子元件被新进入的电子元件从第一搬运通道106的搬运槽132向第二搬运通道108的搬运槽144按压,从而彼此相邻的电子元件无间隙地紧贴。
66.这样,在以预定的姿势排成一列的状态下进入到搬运槽144中的多个电子元件通过第二搬运通道108的电磁马达146的工作而被朝向第二搬运通道108的前端搬运。详细而言,通过电磁马达146的工作,第二搬运通道108如上述那样以高频在前后方向上反复振动。此时,调整电磁马达146的振动频率,以使进入到搬运槽144中的电子元件朝向斜前方浮起。
因此,第二搬运通道108以高频在前后方向上反复振动,从而进入到搬运槽144中的电子元件一点一点地朝向前方行进。由此,在第二搬运通道108中,在搬运槽144的内部,多个电子元件以排成一列的状态被从后端朝向前端搬运。
67.并且,在第二搬运通道108中被搬运至搬运槽144的前端的电子元件进入供给块110的凹部152。即,被搬运至搬运槽144的前端的电子元件从该搬运槽144的前端被送入供给块110的凹部152。此外,凹部152的宽度尺寸比电子元件的宽度尺寸稍大,凹部152的长度尺寸比电子元件的长度尺寸稍大。因此,一个电子元件在以预定的姿势从第二搬运通道108的搬运槽144进入凹部152的状态下被收容。并且,供给收容在凹部152中的一个电子元件。即,在碗式供料器82中,凹部152作为供给位置发挥功能,收容在凹部152中的电子元件被逐个以预定的姿势供给。
68.此外,当在凹部152中收容电子元件时,如上所述,通过检测传感器190对电子元件进行检测。由此,控制器200通过向作业头60、62以及作业头移动装置64输出元件的保持指令而利用吸嘴66来保持收容在凹部152中的一个电子元件。即,在碗式供料器82中,以由检测传感器190检测出元件为条件,利用吸嘴66来保持收容在凹部152中的一个电子元件。此外,检测传感器190对电子元件的检测在碗式供料器82的运转时始终进行。并且,当一个电子元件被吸嘴66保持并从凹部152取出时,通过第二搬运通道108的电磁马达146的工作而从第二搬运通道108的搬运槽144将新的一个电子元件收容在凹部152中。由此,在碗式供料器82中,在凹部152中依次供给一个电子元件。
69.如上所述,在碗式供料器82中,通过电磁马达120、128、136、146的工作,被投入到元件料斗102的元件投入部112的电子元件经由碗104、第一搬运通道106、第二搬运通道108在供给块110的凹部152中被供给。此时,基于检测传感器160、170、180的检测结果来控制电磁马达120、128、136的工作。
70.具体而言,基于检测传感器160的检测结果来控制元件料斗102的电磁马达120的工作。检测传感器160对收容在碗104的元件收容部122中的电子元件的数量的过量或者不足进行检测,当从检测传感器160照射的光未被元件反射而无法返回,从而检测出在元件收容部122中没有充分地收容有电子元件时,电磁马达120工作,元件料斗102反复振动。由此,从元件料斗102向碗104补给电子元件。并且,当通过检测传感器160检测出在元件收容部122中充足地收容有电子元件时,电磁马达120的工作停止。由此,从元件料斗102朝向碗104的电子元件的补给停止。此外,检测传感器160对电子元件的检测在碗式供料器82的运转时始终进行。
71.另外,基于检测传感器170的检测结果来控制碗104的电磁马达128的工作。检测传感器170对第一搬运通道106的搬运槽132的电子元件的有无进行检测,当通过检测传感器170检测到搬运槽132中没有电子元件时,电磁马达128工作,碗104反复振动。由此,从碗104向第一搬运通道106的搬运槽132送入电子元件。并且,当通过检测传感器170检测到在搬运槽132中存在有电子元件时,电磁马达128的工作停止。由此,停止从碗104朝向第一搬运通道106的搬运槽132送入电子元件。此外,检测传感器170对电子元件的检测在碗式供料器82的运转时始终进行。
72.另外,基于检测传感器180的检测结果来控制第一搬运通道106的电磁马达136的工作。检测传感器180对配设于第二搬运通道108的搬运槽144的位置处的电子元件的有无
进行检测,当由检测传感器180检测到在搬运槽144的预定位置没有电子元件时,电磁马达136工作,第一搬运通道106反复振动。由此,从第一搬运通道106的搬运槽132向第二搬运通道108的搬运槽144送入电子元件。并且,当通过检测传感器180检测到在搬运槽144的预定的位置存在有电子元件时,电磁马达136的工作停止。由此,电子元件从第一搬运通道106的搬运槽132朝向第二搬运通道108的搬运槽144的送入停止。此外,检测传感器180对电子元件的检测在碗式供料器82的运转时始终进行。
73.此外,第二搬运通道108的电磁马达146与检测传感器190的检测结果无关地始终工作。即,检测传感器190对供给块110的凹部152的电子元件的有无进行检测,因此无论凹部152有无电子元件,第二搬运通道108的电磁马达146始终工作。因此,第二搬运通道108始终反复振动,每当电子元件被作业头的吸嘴66保持并从凹部152取出时,电子元件被从第二搬运通道108的搬运槽144收容到供给块110的凹部152中。
74.这样,在碗式供料器82中,在碗104、第一搬运通道106以及第二搬运通道108各自设有检测传感器160、170、180。并且,基于这些检测传感器160、170、180的检测结果,分别控制元件料斗102、碗104以及第一搬运通道106各自的电磁马达的工作,从而能够通过碗式供料器82恰当地供给电子元件。
75.即,例如,无论有无收容在碗104的元件收容部122中的电子元件,若电磁马达120始终工作,元件料斗102反复振动,则存在有从元件料斗102向收容有较多电子元件的元件收容部122中进一步补给电子元件的情况。在这样的情况下,即使碗104反复振动,由于在元件收容部122中电子元件的数量过多,因此存在有无法使收容在碗104中的电子元件恰当地分散、无法在元件收容部122的搬运路124中搬运电子元件的隐患。另一方面,在碗式供料器82中,在由检测传感器160检测出在元件收容部122中未收容有足够数量的电子元件的情况下,电磁马达120工作,元件料斗102反复振动。由此,可以使收容在元件收容部122中的电子元件的数量恰当,进而,可以通过碗104的反复振动而在搬运路124中恰当地搬运电子元件。
76.另外,例如,若在不检测第一搬运通道106的搬运槽132的电子元件的数量的过量或者不足的情况下使电磁马达128始终工作,从而使碗104反复振动,则存在有从碗104进一步供给电子元件并进入已经进入了足够数量的电子元件的第一搬运通道106的搬运槽132的情况。在这样的情况下,被供给到搬运槽132的内部的过量的多个电子元件紧贴而成为没有间隙的状态,从而即使第一搬运通道106反复振动,电子元件也无法浮起,进而存在有不会朝向前方行进的隐患。另外,如上所述,在碗104与第一搬运通道106之间存在有微小的间隙,但是若在第一搬运通道106的搬运槽132中电子元件无法朝向前方行进而滞留,则也存在有在该微小的间隙中电子元件发生堵塞的隐患。另一方面,在碗式供料器82中,在由检测传感器170检测出在搬运槽132的预定位置处没有电子元件的情况下,电磁马达128工作,使碗104反复振动。因此,能够限制进入到第一搬运通道106的搬运槽132中的电子元件的数量,能够防止电子元件在搬运槽132的内部的滞留、电子元件在碗104与第一搬运通道106之间的间隙中的堵塞。由此,能够通过第一搬运通道106的反复振动恰当地在搬运槽132中搬运电子元件。
77.另外,例如,若在不检测第二搬运通道108的搬运槽144的电子元件的数量的过量或者不足的情况下使电磁马达136始终工作,从而使第一搬运通道106反复振动,则存在有从第一搬运通道106进一步供给电子元件并进入已经进入了足够数量的电子元件的第二搬
运通道108的搬运槽144的情况。在这样的情况下,被供给至搬运槽144的内部的过量的多个电子元件紧贴而成为没有间隙的状态,即使第二搬运通道108反复振动,电子元件也无法浮起,进而存在有不会朝向前方行进的隐患。另外,如上所述,在第一搬运通道106与第二搬运通道108之间存在有微小的间隙,但是若在第二搬运通道108的搬运槽144中电子元件无法朝向前方行进而滞留,则存在有在该微小的间隙中电子元件发生堵塞的隐患。进一步而言,在搬运槽144的内部,在多个电子元件紧贴而成为没有间隙的状态时,搬运槽144的顶头的电子元件与收容在供给块110的凹部152中的电子元件紧贴。在这样的情况下,由于搬运槽144的顶头的电子元件将收容在凹部152中的电子元件朝向凹部152的内壁面按压,因此即使收容在凹部152中的电子元件被吸嘴66保持,在作业头上升时,电子元件也根本无法由吸嘴66抬起、或者即使能够抬起至中途也存在有脱落隐患。另一方面,在碗式供料器82中,在由检测传感器180检测出在搬运槽144的预定位置没有电子元件的情况下,电磁马达136工作,第一搬运通道106反复振动。因此,能够使进入第二搬运通道108的搬运槽144的电子元件成为恰当的数量,能够防止电子元件在搬运槽144的内部的滞留、收容在凹部152中的电子元件从吸嘴66的脱落、电子元件在第一搬运通道106与第二搬运通道108之间的间隙中的堵塞。由此,能够通过第二搬运通道108的反复振动而在搬运槽144中恰当地搬运电子元件,并且确保吸嘴66对收容在凹部152中的电子元件的恰当的保持。
78.这样,在碗式供料器82中,基于检测传感器160、170、180的检测结果,单独地控制元件料斗102、碗104以及第一搬运通道106各自的电磁马达的工作,从而碗式供料器82能够在供给位置稳定地供给电子元件。并且,通过稳定地供给电子元件,作业者因碗式供料器82的元件堵塞而导致的工作的停止、与停止相伴的维护频率变少,能够减轻作业者的负担。进一步而言,作业者监视碗式供料器82的工作的时间变少,因此能够利用该时间进行其它作业,生产效率提高。
79.特别是在以往的碗式供料器中,在第二搬运通道108设有检测传感器180,但是在第一搬运通道106未设置检测传感器170。因此,碗104的电磁马达128和第一搬运通道106的电磁马达136未被单独地控制,而是被联动地控制。即,在由检测传感器180检测出在第二搬运通道108的搬运槽144的预定位置存在有电子元件的情况下,碗104的电磁马达128和第一搬运通道106的电磁马达136工作。并且,在由检测传感器180检测到在第二搬运通道108的搬运槽144的预定位置没有电子元件的情况下,碗104的电磁马达128和第一搬运通道106的电磁马达136的工作停止。
80.这样,若基于设于第二搬运通道108的检测传感器180的检测结果,联动地控制碗104的电磁马达128和第一搬运通道106的电磁马达136,则存在有即使在第一搬运通道106的搬运槽132的预定位置存在有电子元件、碗104的电磁马达128也工作的情况。即,即使在由检测传感器180检测出在第二搬运通道108的搬运槽144的预定位置没有电子元件的情况下,也存在有在第一搬运通道106的搬运槽132的预定位置存在有电子元件的情况。即使在这样的情况下,由于不仅第一搬运通道106的电磁马达136工作,碗104的电磁马达128也工作,因此如上所述,存在有在第一搬运通道的搬运槽132的内部发生电子元件的滞留、或者在碗104与第一搬运通道106之间的间隙中发生电子元件的堵塞的隐患。
81.另外,若基于设于第二搬运通道108的检测传感器180的检测结果,联动地控制碗104的电磁马达128和第一搬运通道106的电磁马达136,则存在有即使在第一搬运通道106
的搬运槽132的预定位置没有电子元件、碗104的电磁马达128的工作也停止的情况。即,即使在由检测传感器180检测出在第二搬运通道108的搬运槽144的预定位置存在有电子元件的情况下,也存在有在第一搬运通道106的搬运槽132的预定位置不存在电子元件的情况。即使在这样的情况下,由于不仅第一搬运通道106的电磁马达136停止工作,碗104的电磁马达128也停止工作,因此不会从碗104向没有电子元件的第一搬运通道106的搬运槽132供给电子元件。因此,存在有在碗式供料器82的电子元件的搬运路中产生没有电子元件的区间而使得电子元件的搬运变得不稳定、或者产生不从碗式供料器82供给电子元件的时间的隐患。
82.另一方面,在碗式供料器82中,在第二搬运通道108设有检测传感器180,并且在第一搬运通道106也设有检测传感器170。并且,基于检测传感器170、180的检测结果而单独地控制碗104的电磁马达128和第一搬运通道106的电磁马达136。因此,例如,在第二搬运通道108的搬运槽144的预定位置没有电子元件、且在第一搬运通道106的搬运槽132的预定位置存在有电子元件的情况下,第一搬运通道106的电磁马达136工作,碗104的电磁马达128的工作停止。通过像这样地控制各电磁马达,能够进行电子元件从第一搬运通道106朝向第二搬运通道108的补给,并且能够防止在第一搬运通道106的搬运槽132的内部发生电子元件的滞留、或者在碗104与第一搬运通道106之间的间隙中发生电子元件的堵塞。另外,例如,在检测出在第二搬运通道108的搬运槽144的预定位置存在有电子元件、且检测出在第一搬运通道106的搬运槽132的预定位置没有电子元件的情况下,第一搬运通道106的电磁马达136的工作停止,碗104的电磁马达128工作。通过像这样地控制各电磁马达,能够防止在第二搬运通道108的搬运槽144的内部发生电子元件的滞留、或者在第一搬运通道106与第二搬运通道108之间的间隙中防止电子元件的堵塞,并且能够进行电子元件从碗104朝向第一搬运通道106的补给。
83.另外,例如,在检测出在第二搬运通道108的搬运槽144的预定位置存在有电子元件、且检测出在第一搬运通道106的搬运槽132的预定位置也存在有电子元件的情况下,第一搬运通道106的电磁马达136的工作停止,碗104的电磁马达128的工作也停止。由此,能够防止在第一搬运通道106以及第二搬运通道108中的搬运槽132、144的内部发生电子元件的滞留、或者在第一搬运通道106与第二搬运通道108之间的间隙以及碗104与第一搬运通道106之间的间隙中发生电子元件的堵塞。另外,例如,在第二搬运通道108的搬运槽144的预定位置处无法检测出电子元件、且检测出在第一搬运通道106的搬运槽132的预定位置处也没有电子元件的情况下,第一搬运通道106的电磁马达136工作,并且碗104的电磁马达128也工作。通过像这样地控制各电磁马达,能够从第一搬运通道106朝向第二搬运通道108进行电子元件的补给,并且还能够从碗104朝向第一搬运通道106进行电子元件的补给。这样,通过单独地控制碗104的电磁马达128和第一搬运通道106的电磁马达136,各搬运通道能够具备能够稳定地搬运的适当数量的电子元件,进而,碗式供料器82能够在供给位置不中断地稳定地供给电子元件。
84.此外,控制装置36是控制装置的一例。碗式供料器82是碗式供料器的一例。碗104是碗的一例。第一搬运通道106是搬运部的一例。第二搬运通道108是搬运部的一例。供给块110是供给部的一例。检测传感器160是第一检测传感器的一例。检测传感器170是第二检测传感器的一例。检测传感器180是第二检测传感器的一例。检测传感器190是第三检测传感
器的一例。
85.此外,本发明并不局限于上述实施例,能够以基于本领域技术人员的知识而实施了各种变更、改良的各种方式来实施。例如,在上述实施例中,第二搬运通道108的电磁马达146始终工作,但是也可以基于检测传感器190的检测结果来对其进行控制。即,也可以基于供给块110的凹部152中的电子元件的有无来控制第二搬运通道108的电磁马达146。具体而言,也可以是,在由检测传感器190检测出在凹部152中没有电子元件的情况下,电磁马达146工作,第二搬运通道108反复振动,从而从第二搬运通道108向凹部152供给电子元件。另外,也可以是,在由检测传感器190检测出在凹部152中存在有电子元件的情况下,以如下方式进行控制:使电磁马达146的工作停止而使第二搬运通道108的反复振动停止,从而停止电子元件从第二搬运通道108朝向凹部152的供给。
86.另外,在上述实施例中,通过检测传感器190对供给块110的凹部152中的电子元件的有无进行检测,但是也可以基于拍摄装置26的拍摄数据来对凹部152中的电子元件的有无进行判断。即,在利用作业头60、62从凹部152保持电子元件之前,利用拍摄装置26对凹部152进行拍摄。并且,也可以在控制器中对拍摄数据进行分析,从而判断在凹部152中是否存在有电子元件。
87.另外,在上述实施例中,作业者向元件料斗102投入电子元件,从该元件料斗102向碗104补给电子元件,但是作业者也可以向碗104投入电子元件。即,也可以采用没有元件料斗102的碗式供料器。
88.另外,在上述实施例中,通过第一搬运通道106和第二搬运通道108这两条搬运通道,将电子元件从碗104搬运至供给块110,但是也可以通过一条搬运通道,将电子元件从碗104搬运至供给块110。即,也可以将第一搬运通道106和第二搬运通道108设为一体的一条搬运通道。在这样的情况下,在该一条搬运通道的预定位置配设有检测传感器,基于该检测传感器的检测结果来控制碗104的工作。此外,在该一条搬运通道中,通常配设有一个检测传感器,但是也可以将多个检测传感器配设于预定位置来检测电子元件。这样,通过在搬运通道配设检测传感器,搬运通道能够保有恰当数量的电子元件,进而,碗式供料器能够在供给位置不中断地稳定地供给各种电子元件。另外,该一条搬运通道的工作可以基于凹部152中的电子元件的有无、即检测传感器190的检测结果来控制,也可以以在预定的时机下进行动作的方式进行控制。
89.另外,在上述实施例中,检测传感器160、170、180、190对电子元件的检测在碗式供料器82的运转时始终进行检测,但是也可以在任意的时机下进行检测。具体而言,例如,也可以以预定的周期进行检测传感器160、170、180、190对电子元件的检测。另外,例如,也可以在电子元件在配设有检测传感器160、170、180、190的部位移动的时机下进行检测传感器160、170、180、190对电子元件的检测。即,可以在配设有检测传感器160的碗104反复振动的时机下进行检测传感器160对电子元件的检测,也可以在配设有检测传感器170的第一搬运通道106反复振动的时机下进行检测传感器170对电子元件的检测。另外,作为用于使各碗、搬运通道振动的驱动源,也可以取代电磁马达而采用压电元件、气压
·
液压式的各种致动器。
90.另外,在上述实施例中,本发明被应用于供给电子元件的碗式供料器82,但是并不局限于电子元件,本发明也可以应用于供给各种元件的碗式供料器。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
