1.本实用新型属于非线性光学应用领域领域,涉及光捕获和三维操纵装置,具体涉及一种基于空心光对空气中吸光粒子的光捕获和三维操纵装置。
背景技术:
2.近年来,随着对空气污染颗粒原位分析需求的不断增加,吸光性颗粒的光学捕获和操控引起了人们的关注。其中高精度的三维光学操控是一项具有挑战性的技术,因为需要将被捕获的颗粒位移至激发激光的焦点位置进行光谱分析。目前,粒子沿着z方向(捕获激光的传播方向)的操控通常是通过改变捕获激光的功率来是实现的。但是,这种位移的方法需要较大的捕获激光功率。并且由于捕获激光功率的变化,颗粒上的散射光也会发生变化,因此对光谱信号的提取造成干扰。
3.更严重的是,对于一些光稳定性较差的颗粒,其物理化学性质会随着照射光功率的变化而发生变化,因此无法实现对颗粒的无损分析。而对于被捕获颗粒在x-y平面(垂直于捕获激光传播方向的平面)中的光学操控,主要有两种,一种是通过使用聚焦光阱和从圆形孔径衍射的锥形环光阱;另一种是通过使用柱面透镜和圆形光阑组合的新方法。而这两种方法都各有缺陷,使用聚焦光阱和从圆形孔径衍射的锥形环光阱虽然可以实现吸光粒子的连续旋转,但无法控制粒子旋转方向;而使用柱面透镜和圆形光阑组合的新方法,其捕获激光的功率不能低于100mw,否则粒子很容易从捕获装置中逃逸,并且也无法同时实现被捕获粒子的一维操纵和粒子的二维旋转(三维操纵)。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的在于,提供一种基于空心光对空气中吸光粒子的光捕获和三维操纵装置,解决现有技术中对空气中吸光粒子的捕获时无法在低捕获功率下控制粒子旋转方向以及无法同时实现被捕获粒子的一维操纵和二维旋转的技术问题。
5.为了解决上述技术问题,本实用新型采用如下技术方案予以实现:
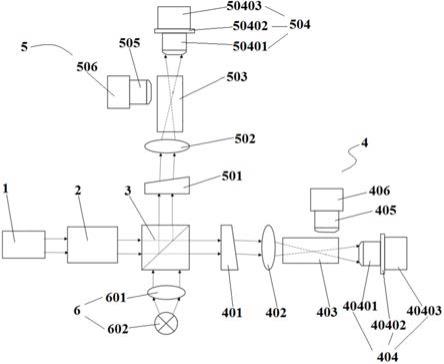
6.基于空心光对空气中吸光粒子的光捕获和三维操纵装置,包括依次设置的激光器、空心光产生单元、偏振分光镜,还包括横向捕获单元、竖向捕获单元和照明单元;所述的横向捕获单元设置在偏振分光镜的p光方向上,竖向捕获单元设置在偏振分光镜的s光方向上,所述的照明单元设置在偏振分光镜的s光的反方向上;
7.所述的横向捕获单元中包括第一偏折镜;所述的竖向捕获单元包括第二偏折镜。
8.本实用新型还具有以下技术特征:
9.具体的,所述的横向捕获单元还包括依次设置的第二凸透镜、一号样品池和横向图像收集机构;所述的竖向捕获单元还包括依次设置的第三凸透镜、二号样品池和竖向图像收集机构。
10.具体的,所述的横向图像收集机构包括依次固定连接的第一显微物镜、第一陷波
滤光片和第一成像结构;所述的竖向图像收集机构包括依次固定连接的第二显微物镜、第二陷波滤光片和第二成像结构。
11.具体的,所述的一号样品池的竖向上侧设置有固定相连的第三显微物镜和第三成像结构;所述的二号样品池的横向前侧设置有固定相连的第四显微物镜和第四成像结构。
12.具体的,所述的第一偏折镜和第二偏折镜为楔形棱镜。
13.具体的,所述的照明单元包括在偏振分光镜的竖向下侧依次设置的第一凸透镜和白炽灯。
14.具体的,所述的空心光产生单元为交叉相位空间光束调制系统或者空间光调制器。
15.具体的,所述的激光器为532nm半导体连续激光器或全固态可调谐钛宝石染料连续激光器。
16.具体的,所述的第一成像结构、第二成像结构、第三成像结构和第四成像结构为ccd相机、iccd相机或cmos相机。
17.本实用新型与现有技术相比,有益的技术效果是:
18.(ⅰ)本实用新型通过分别旋转设置在横向捕获单元和竖向捕获单元中的第一偏折镜和第二偏折镜,实现了被捕获粒子分别在横向和竖向的垂直于捕获激光传播方向的平面上的二维旋转,且其旋转方向可控,解决了现有技术中对空气中吸光粒子的捕获时无法在低捕获功率下控制粒子旋转方向;此外,由于采用空心光来捕获吸光粒子,捕获功率可低至25mw,因此也解决了微粒在二维旋转过程中捕获光能量过高问题。
19.(ⅱ)本实用新型通过改变空心光尺寸大小实现了被捕获微粒在捕获激光的传播方向的一维操纵;此外,由于加入偏折镜,将被捕获微粒的一维操纵和二维旋转有效的结合起来,即实现了被捕获粒子在竖向捕获单元和横向捕获单元内微米级别的三维操纵,又解决了现有技术中无法同时实现被捕获粒子的一维操纵和二维旋转的技术问题。
附图说明
20.图1为本实用新型的整体结构示意图;
21.图2为本实用新型所收集的水平装置内被捕获粒子在垂直激光方向平面上的旋转图;
22.图3为本实用新型所收集的竖直装置内被捕获粒子在垂直激光方向平面上的旋转图;
23.图4为调制激光功率与空心光尺寸变化的示意图;
24.图5展示的是调制光功率与空心光尺寸的线性拟合图;
25.图6水平方向,空心光尺寸与被捕获粒子在激光传播方向上移动距离的关系图;
26.图7竖直方向,空心光尺寸与被捕获粒子在激光传播方向上移动距离的关系图。
27.图中各个标号的含义为:1-激光器,2-空心光产生单元,3-偏振分光镜,4-横向捕获单元,5-竖向捕获单元,6-照明单元;
28.401-第一偏折镜,402-第二凸透镜,403-一号样品池,404-横向图像收集机构,405-第三显微物镜,406-第三成像结构;
29.40401-第一显微物镜,40402-第一陷波滤光片,40403-第一成像结构;
30.501-第二偏折镜,502-第三凸透镜,503-二号样品池,504-竖向图像收集机构,505-第四显微物镜,506-第四成像结构;
31.50401-第二显微物镜,50402-第二陷波滤光片,50403-第二成像结构;
32.601-第一凸透镜,602-白炽灯。
33.以下结合实施例对本实用新型的具体内容作进一步详细解释说明。
具体实施方式
34.需要说明的是,本实用新型中采用空心光束的原因为:一束光照射到吸光性微粒表面时,造成此微粒其被照射表面温度升高,从而进一步引起微粒表面所附着的气体分子的热运动加剧,气体分子会以更大的速度弹离微粒表面,由于被照射面的气体分子的热运动大于未照射面的,因此综合作用下将会使微粒产生一个由照射面指向未被照射面的净作用力。对于空心光束,其作用在微粒表面上的力可表示为:
[0035][0036]
其中,ρ
α
是空气的密度,m
α
是空气分子的质量,b为普适空气常数,t为微粒表面温度,m是空气分子的摩尔质量,s为微粒上光照射区域的面积;
[0037]
对于不规则的微粒:
[0038][0039]
γ是所处气体环境的比热比,p气体压力,p
*
是特征压力,气体分子的平均速度,p
l
捕获激光束照射粒子的有效功率,δα=α
1-α2,
[0040]
在重力、f
δt
和f
δα
的共同作用下,微粒可以在在焦点后进行捕获;而在操控过程中,阻力、重力、f
δt
和f
δα
可使得微粒在被操控的过程中被稳定捕获,从而对捕获的微粒进行三维操控。
[0041]
因此,采用空心光可以使微粒被稳定捕获,并进行三维操控。
[0042]
需要说明的是,图4和图5说明了在捕获激光(空心光)能量不变的情况下,可以有效的控制空心光尺寸的线性变化。
[0043]
需要说明的是,本实用新型中的所有零部件,在没有特殊说明的情况下,均采用本领域已知的零部件。
[0044]
以下给出本实用新型的具体实施例,需要说明的是本实用新型并不局限于以下具体实施例,凡在本技术技术方案基础上做的等同变换均落入本实用新型的保护范围。
[0045]
实施例:
[0046]
本实施例给出了基于空心光对空气中吸光粒子的光捕获和三维操纵装置,如图1所示,包括依次设置的激光器1、空心光产生单元2、偏振分光镜3,还包括横向捕获单元4、竖向捕获单元5和照明单元6;横向捕获单元4设置在偏振分光镜3的p光方向上,竖向捕获单元5设置在偏振分光镜3的s光方向上,照明单元6设置在偏振分光镜3的s光的反方向上;
[0047]
横向捕获单元4中包括第一偏折镜401;竖向捕获单元5包括第二偏折镜501。
[0048]
在本实施例中,第一偏折镜和第二偏折镜的作用是使经过偏振分光镜3得到的两束空心光束发生一定角度的偏折,且旋转偏折镜,通过偏折镜后的空心光束也同样围绕光轴旋转。
[0049]
在上述技术方案中,通过分别旋转设置在横向捕获单元和竖向捕获单元中的第一偏折镜和第二偏折镜,实现了被捕获粒子分别在横向和竖向垂直于捕获激光传播方向的平面上的二维旋转,且其旋转方向可控,解决了现有技术中对空气中吸光粒子的捕获时无法在低捕获功率下控制粒子旋转方向;此外,由于采用空心光来捕获吸光粒子,捕获功率可低至25mw,因此也解决了微粒在二维旋转过程中捕获光能量过高问题。
[0050]
作为本实施例的一种优选方案,横向捕获单元4还包括依次设置的第二凸透镜402、一号样品池403和横向图像收集机构404;竖向捕获单元5还包括依次设置的第三凸透镜502、二号样品池503和竖向图像收集机构504。
[0051]
在本实施例中,第二凸透镜402和第三凸透镜502的作用是使产生的空心光束发生聚焦,从而形成光阱,其中,第二凸透镜和第三凸透镜的焦距均为45mm;一号样品池403和二号样品池503则是为了减少捕获颗粒时来自空气中气流扰动的影响。
[0052]
作为本实施例的一种优选方案,横向图像收集机构404包括依次固定连接的第一显微物镜40401、第一陷波滤光片40402和第一成像结构40403;竖向图像收集机构504包括依次固定连接的第二显微物镜50401、第二陷波滤光片50402和第二成像结构50403。
[0053]
在本实施例中,在横向图像收集机构404中,使被捕获粒子的图像分别经过第一显微物镜,通过第一陷波滤光片对光强进行衰减,通过调整第一显微物镜和第一成像结构的距离,使其成像到第一成像结构上,如图2所示,且其微粒旋转方向可控;在竖向图像收集机构504中,使被捕获粒子的图像经过第二显微物镜成像,通过第二陷波滤光片对光强进行衰减,通过调整第二显微物镜和第二成像结构的距离,使其成像到第二成像结构上,如图3所示,且其微粒旋转方向可控。
[0054]
作为本实施例的一种优选方案,一号样品池403的竖向上侧设置有固定相连的第三显微物镜405和第三成像结构406;二号样品池503的横向前侧设置有固定相连的第四显微物镜505和第四成像结构506。
[0055]
在本实施例中,使用第三显微物镜405和第四显微物镜505对被捕获粒子上散射光的收集,通过调整第三显微物镜和第三成像结构的距离,使其成像到第三成像结构上,如图6所示;通过调整第四显微物镜和第四成像结构的距离,使其成像到第四成像结构上,如图7所示。通过将上述成像与图2和图3结合,可以得到本实用新型实现了被捕获粒子的三位操纵。
[0056]
作为本实施例的一种优选方案,第一偏折镜401和第二偏折镜501为楔形棱镜,可以通过旋转楔形棱镜来改变粒子的旋转方向。
[0057]
作为本实施例的一种优选方案,照明单元6包括在偏振分光镜3的竖向下侧依次设置的第一凸透镜601和白炽灯602。
[0058]
在本实施例中,通过调节白炽灯、第一凸透镜和偏振分光镜之间的距离,为横向图像收集机构和竖向图像收集机构的视场提供照明,使被捕获的粒子可被观测,其中,第一凸透镜的焦距为30mm。
[0059]
作为本实施例的一种优选方案,所述的空心光产生单元2为交叉相位空间光束调
制系统或者空间光调制器。
[0060]
作为本实施例的一种优选方案,激光器1为532nm半导体连续激光器或全固态可调谐钛宝石染料连续激光器。
[0061]
本实施例中所用为532nm半导体连续激光器。
[0062]
作为本实施例的一种优选方案,第一成像结构40403、第二成像结构50403、第三成像结构406和第四成像结构506为ccd相机、iccd相机或cmos相机。
[0063]
本实例中所用为cmos相机。
[0064]
本实用新型的工作过程如下所述:
[0065]
从激光器1获得一种高斯分布的连续激光束,将所获得的连续激光束通过空心光产生单元2获得一束空心光束;获得的空心光束入射到偏振分光镜3,得到方向垂直的两束空心光束,再将两束空心光束分别进入横向捕获单元4和竖向捕获单元5中,首先两束空心光束分别入射到第一偏折镜401和第二偏折镜501;使两束空心光束发生一定角度的偏折,然后在分别入射到经第二凸透镜402和第三凸透镜502分别形成会聚的空心光束,会聚的空心光束入射到第一样品池403和第二样品池503中;向样品池中喷入样品微粒,在焦点附近可观察到被捕获的微粒;改变空心光束尺寸大小,可由第三显微物镜405将被捕获的微粒成像于第三成像结构406中得到横向微粒移动距离随空心光尺寸变化图;旋转第一偏折镜401,可由横向图像收集机构404得到横向中微粒的二维旋转图;同样,改变空心光束尺寸大小,可由第四显微物镜505将被捕获的微粒成像于第四成像结构506中得到竖向微粒移动距离随空心光尺寸变化图;旋转第二偏折镜501,可由竖向图像收集机构504得到竖向中微粒的二维旋转图。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。