1.本实用新型涉及瓷制品修坯技术领域,尤其涉及一种日用瓷异形盘修坯机。
背景技术:
2.日用瓷盘种类很多,如圆盘、椭圆盘、三角盘、四方盘、腰形盘及其它不规则的多边型的盘类产品。目前国内的全自动化修坯生产线只适用于圆盘修坯,异形瓷盘由于每种坯体中心、边缘都不一致,难以定位,只能采用半自动化修坯机进行修坯或纯手工修坯,半自动化修坯机采用固定的模型来定位托盘,需要人工将坯体放在模型托盘上,保证坯体中心、方位等一致,再进行修边工具。而对于纯手工修坯,由于人工的操作手法、用力程度都不够稳定,导致生产出来的产品尺差很难控制,随意性大,产品质量难以上档次,且操作人员劳动强度大,生产效率低。
技术实现要素:
3.本实用新型提供一种日用瓷异形盘修坯机,该修坯机能解决现有的修坯机或人工修坯存在的难以定位、产品质量低、生产效率低等技术问题。
4.一种日用瓷异形盘修坯机,其包括:
5.底架和依次布置在底架上的打边机构、视觉识别装置、磨边机构、润边机构;
6.所述修坯机还包括用于抓取坯体的机械手组件,所述机械手组件衔接上料区、打边机构、视觉识别装置、磨边机构、润边机构和下料区;
7.所述视觉识别装置与机械手组件电性连接,所述视觉识别装置用于获取被机械手组件抓取的坯体的相对位置信息;所述机械手组件根据所述相对位置信息调整坯体与磨边机构、润边机构的相对位置。
8.本实用新型的日用瓷异形盘修坯机在底架上设置视觉识别装置,当机械手组件抓取坯体至视觉识别装置前方时,视觉识别装置检测出坯体的中心位置、边缘轮廓等相对位置信息,并将该相对位置信息反馈回机械手组件,机械手组件根据该相对位置信息调整其相对于磨边机构的位置,使坯体能够对应磨边机构,进而磨边机构能够沿坯体的边缘轮廓进行磨边。同理,机械手组件根据上述相对位置信息调整其相对于润边机构的位置,使润边机构能够对坯体的边缘轮廓进行润边。本实用新型的日用瓷异形盘修坯机实现了日用瓷异形盘在一台设备上完成定位、打边、磨边、润边的全自动生产流程,其修坯精度高、能够提高生产效率、降低工人的劳动强度。
9.进一步,所述修坯机还包括第一圆台和第二圆台,所述第一圆台设置在所述打边机构和视觉识别装置之间,所述第二圆台设置在所述磨边机构和润边机构之间;
10.所述第一圆台和第二圆台用于临时放置坯体。
11.进一步,所述机械手组件包括打边机械手、磨边机械手和润边机械手;
12.所述打边机械手衔接上料区、打边机构和第一圆台;
13.所述磨边机械手衔接第一圆台、视觉识别装置、磨边机构和第二圆台;
14.所述润边机械手衔接第二圆台、润边机构和下料区;
15.所述视觉识别装置与所述磨边机械手、润边机械手电性连接。
16.进一步,所述打边机械手、磨边机械手、打边机械手均装有吸盘头,所述吸盘头用于抓取坯体。
17.进一步,所述打边机构包括旋转的压辊,所述压辊用于对坯体进行打边。
18.进一步,所述磨边机构包括高速旋转的砂带轮,所述砂带轮用于对坯体进行磨边。
19.进一步,所述润边机构包括低速旋转的海绵轮,所述海绵轮用于对坯体进行润边。
20.进一步,所述视觉识别装置包括摄像头和安装支架,所述安装支架安装于所述底架上,所述摄像头安装于所述安装支架上。
附图说明
21.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
22.图1是本实用新型的日用瓷异形盘修坯机的俯视图;
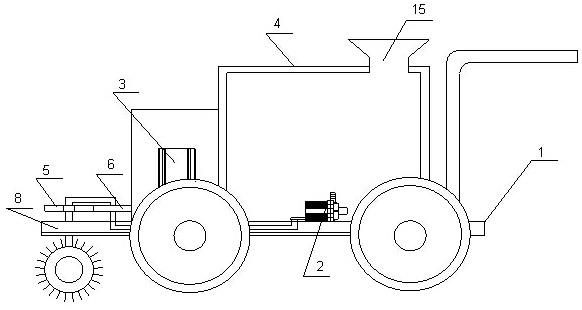
23.图2是本实用新型的日用瓷异形盘修坯机的左视图。
24.其中,1、底架、2、打边机构,3、第一圆台,4、视觉识别装置,5、磨边机构,6、第二圆台,7、润边机构,8、打边机械手,9、磨边机械手,10、润边机械手,21、压辊,41、安装支架,42、摄像头,51、砂带轮,61、海绵轮,101、吸盘头,102、上料区,103、下料区。
具体实施方式
25.为了使实用新型的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本实用新型进行详细描述。
26.如图1所示,本实用新型的日用瓷异形盘修坯机,其包括:
27.底架1和依次布置在底架1上的打边机构2、视觉识别装置4、磨边机构5、润边机构7;
28.所述修坯机还包括用于抓取坯体的机械手组件,所述机械手组件衔接上料区102、打边机构2、视觉识别装置4、磨边机构5、润边机构7和下料区103;
29.所述视觉识别装置4与机械手组件电性连接,所述视觉识别装置用于获取被机械手组件抓取的坯体的相对位置信息;所述机械手组件根据所述相对位置信息调整坯体与磨边机构5、润边机构7的相对位置。
30.本实用新型的日用瓷异形盘修坯机在底架1上设置视觉识别装置4,当机械手组件抓取坯体至视觉识别装置4前方时,视觉识别装置4检测出坯体的中心位置、边缘轮廓等相对位置信息,并将该相对位置信息反馈回机械手组件,机械手组件根据该相对位置信息调整其相对于磨边机构5的位置,使坯体能够对应磨边机构5,进而磨边机构5能够沿坯体的边缘轮廓进行磨边。同理,机械手组件根据上述相对位置信息调整其相对于润边机构7的位置,使润边机构7能够对坯体的边缘轮廓进行润边。本实用新型的日用瓷异形盘修坯机实现了日用瓷异形盘在一台设备上完成定位、打边、磨边、润边的全自动生产流程,其修坯精度高、能够提高生产效率、降低工人的劳动强度。
31.所述视觉识别装置4包括摄像头42和安装支架41,所述安装支架41安装于所述底架1上,所述摄像头42安装于所述安装支架41上。
32.其中,所述上料区102内设置有转盘、传送带或其他传送装置,坯体在转盘或传送带上被依次送至打边机械手8抓取坯体的位置。所述下料区103内也设置有转盘、传送带或其他传送装置,润边机械手10将修边完成的坯体放置在下料区103的转盘或传送带上,坯体被传输至下一工序。
33.所述机械手组件可以包括一个或多个机械手,当所述机械手组件仅包括一个机械手时,机械手通过自身旋转到达上述各机构的对应位置。或机械手通过移动装置到达上述各机构的对应位置,所述移动装置可以为轨道、转盘等。
34.为了提高日用瓷异形盘修坯机的工作效率,所述修坯机还包括第一圆台3和第二圆台6,所述第一圆台3设置在所述打边机构2和视觉识别装置4之间,所述第二圆台6设置在所述磨边机构5和润边机构7之间;所述第一圆台3和第二圆台6用于临时放置坯体。相应地,所述机械手组件包括打边机械手8、磨边机械手9和润边机械手10;所述打边机械手8衔接上料区102、打边机构2和第一圆台3;所述磨边机械手9衔接第一圆台3、视觉识别装置4、磨边机构5和第二圆台6;所述润边机械手10衔接第二圆台6、润边机构7和下料区103;所述视觉识别装置4与所述磨边机械手9、润边机械手10电性连接。
35.具体地,所述打边机械手8、磨边机械手9、打边机械手8均装有吸盘头101,所述吸盘头101用于抓取坯体。
36.采用上述结构,打边机械手8、磨边机械手9和润边机械手10仅需在各自对应的机构之间往复工作即可,且三个机械手可以同时工作,大大提高了工作效率。
37.并且,所述磨边机械手9的吸盘头101在第二圆台6上放置坯体时的位置与润边机械手10的吸盘头101在第二圆台6上抓取坯体时的位置相同,坯体在磨边机械手9上的相对位置被完整地复制到润边机械手10上,因此,润边机械手10抓取坯体后,无须再次进行视觉识别,直接使用前述相对位置信息调整坯体使其与润边机构7配合即可。
38.如图2所示,所述打边机构2包括旋转的压辊21,所述压辊21用于对坯体进行打边。
39.所述磨边机构5包括高速旋转的砂带轮51,所述砂带轮51用于对坯体进行磨边。
40.所述润边机构7包括低速旋转的海绵轮61,所述海绵轮61用于对坯体进行润边。
41.本实用新型的工作过程如下:打边机械手从上料区抓取坯体进行打边,打边完成后将坯体放在第一圆台;磨边机械手从第一圆台抓取坯体至视觉识别装置,视觉识别装置获取坯体位置信息并发送位置信息至磨边机械手和润边机械手;磨边机械手将坯体抓取至磨边机构进行磨边,并在完成后放置在第二圆台;润边机械手从第二圆台抓取坯体进行润边,并在完成后将坯体放置在下料区。
42.在本实用新型的描述中,需要理解的是,术语“竖向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为便于描述本实用新型和简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本实用新型保护内容的限制。
43.如果本文中使用了“第一”、“第二”等词语来限定零部件的话,本领域技术人员应该知晓:“第一”、“第二”的使用仅仅是为了便于描述本实用新型和简化描述,如没有另外声
明,所述词语并没有特殊的含义。
44.本实用新型并不局限于所述实施方式,如果对本实用新型的各种改动或变形不脱离本实用新型的精神和范围,倘若这些改动和变形属于本实用新型的权利要求和等同技术范围之内,则本实用新型也意图包含这些改动和变形。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。