技术特征:
1.一种有色金属连续铸锭线的金属液位测量系统,其特征在于,包括:上位机、激光发射器、工业相机以及滤光片;所述激光发射器设于传送生产线上方,激光发射器的激光平面与传送生产线传动面垂直,用于扫描传送生产线上的待测金属溶液;所述工业相机设于传送生产线上方,且安装于传送生产线放料处与激光发射器之间,所述工业相机倾斜设置,用于采集激光在待测金属溶液上扫描后得到待测金属溶液状态的光条轮廓图像;所述滤光片设于镜头前方,所述工业相机光轴与滤光片的中心轴线重合,用于减少激光反射量对工业相机采集的结果图像的影响;所述上位机,与工业相机连接,用于接收工业相机采集的光条轮廓图像,并进行处理得到待测金属溶液的高度差信息。2.根据权利要求1所述的一种有色金属连续铸锭线的金属液位测量系统,其特征在于,所述激光发射器为红光波激光发射器。3.根据权利要求1所述的一种有色金属连续铸锭线的金属液位测量系统,其特征在于,所述工业相机倾斜设置为:激光发射器向被测金属溶液表面投射激光时形成一个激光平面,相机光轴和激光平面之间形成的夹角为30
°
~45
°
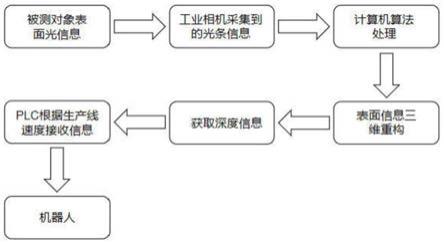
。4.一种有色金属连续铸锭线的金属液位测量方法,其特征在于,包括以下步骤:1)传送生产线按照设定速度匀速运行,激光发射器发射激光扫描到待测金属溶液,并在待测金属溶液表面形成一条不规则的波纹线;2)工业相机实时对激光扫描后在待测金属溶液上形成每条不规则的波纹线进行采集,得到多个光条轮廓图像;3)工业相机将多个光条轮廓图像传输至上位机,上位机对实时采集的光条轮廓图像进行建模,得到被测金属溶液表面的三维点云模型图;并对三维点云模型图进行去噪处理;4)根据激光三角测量原理,对被测金属溶液表面的三维点云模型图分析,生成金属液位的高度差信息。5.根据权利要求4所述的一种有色金属连续铸锭线的金属液位测量方法,其特征在于,步骤3)中,所述上位机对实时采集的光条轮廓图像进行建模,得到被测金属溶液表面的三维点云模型图,具体为:(1)在传送生产线相对于金属液位测量系统做相对运动时,工业相机每一次拍摄都得到一张被测金属溶液表面的光条轮廓图像;(2)将得到的每个光条轮廓图像依次存储为图像中对应的每一行,对每一行图像进行处理,得到视差图像;(3)在经过标定的测量系统中,视差图像上的每一个点的坐标及灰度值,即是对应待测金属溶液表面上的点在世界坐标系上的具体坐标;(4)根据得到待测金属溶液表面上的点在世界坐标系上的具体坐标进行建模,得到被测金属溶液表面的三维点云模型图。6.根据权利要求5所述的一种有色金属连续铸锭线的金属液位测量方法,其特征在于,步骤(2)中,所述对每一行图像进行处理,得到视差图像,具体为:依次将工业相机得到的光条轮廓图像从图0到图n,n为大于0的整数;储存为图像中的所有行依次组合起来,得到视差
图像。7.根据权利要求4所述的一种有色金属连续铸锭线的金属液位测量方法,其特征在于,步骤3)中,所述并对三维点云模型图进行去噪处理,具体为:将得到的三维点云模型通过pcl的双边滤波算法进行去噪;通过取邻近采样点的加权平均来修正当前采样点的位置,以实现滤掉噪声同时剔除与当前采样点云差异超过阈值的相邻采样点;计算相邻点云点之间的距离,根据距离的大小值进行聚类,进而得到只存在被测表面的点云信息,实现进一步对干扰点的剔除。8.根据权利要求4所述的一种有色金属连续铸锭线的金属液位测量方法,其特征在于,所述步骤4)具体为:当被测金属溶液表面的高度发生变化时,工业相机视点和激光线的交点发生向上相对移动或向下相对移动;根据得到的视差图像,通过视差图像中当前行中的像素点和与其相邻的行中对应的像素点进行匹配,得到当前行中的该像素点的相对移动量,进而得到该点在三维点云模型图中的高度差信息,获得被测金属溶液的液位高度。
技术总结
本发明属于工业铸锭线金属液面测量领域,具体说是一种有色金属连续铸锭线的金属液位测量系统,包括:上位机、激光发射器、工业相机以及滤光片;激光发射器设于传送生产线上方,激光发射器的激光平面与传送生产线传动面垂直;工业相机设于传送生产线上方,且安装于传送生产线放料处与激光发射器之间,工业相机倾斜设置,用于采集激光在待测金属溶液上扫描后得到待测金属溶液状态的光条轮廓图像;滤光片设于镜头前方,上位机与工业相机连接,用于处理得到待测金属溶液的高度差信息。本系统采用激光三角法,所使用的硬件软件价格相较于在保持同等精度要求的实时测量方式所需要付出的代价和后期维护费用相比更加低廉。代价和后期维护费用相比更加低廉。代价和后期维护费用相比更加低廉。
技术研发人员:曹福来 崔龙 白宁 刘钊铭 缪磊 王宏伟 田申 徐伟 张峰 吴航 杨瑞
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:2021.10.29
技术公布日:2022/2/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。