1.本发明涉及机器人导航技术领域,具体涉及一种动态创建机器人巡航坐标方法及机器人导航方法。
背景技术:
2.目前的机器人是通过自身扫描的地图进行移动,在地图中标注不同的目标位置,这些位置都是固定的,例如酒店房间、餐厅餐桌,使用者通过机器人自带pad、移动终端向机器人下达巡航或移动到指定标注点的任务,机器人接到任务后开始移动。然而,现有的机器人具有以下局限性:
①
现有服务机器人必须由运营人员现场进行地图扫描,手动配置巡航点,配置巡航点的时候手动设定位置名称,整个过程比较复杂不易操作,而且人工手动操作容易出错。
②
现有机器人巡航技术只能在特定场景下进行服务,例如博物馆、餐厅、景区固定导航讲解,机器人无法确认移动目标的位置,无法向随机移动的目标最终停止的位置移动。因此,目标人必须停留在系统提前设定的巡航点上,才能得到机器人的服务。
3.基于以上描述,亟需一种动态创建机器人巡航坐标方法及机器人导航方法,以解决现有技术中人工操作配置巡航点比较复杂,且容易出错,机器人无法确认移动目标的位置且不能对移动目标进行服务的问题。
技术实现要素:
4.本发明的目的在于提供一种动态创建机器人巡航坐标方法,通过该方法,让机器人具有判断移动目标位置的能力,且判断过程不易出错。
5.本发明的目的之二在于提供一种机器人导航方法,通过该方法机器人可以精确的判断移动目标物的位置,机器人可以向随机移动的目标物移动,对移动的目标物进行跟随服务。
6.本发明的目的通过以下技术方案予以实现。
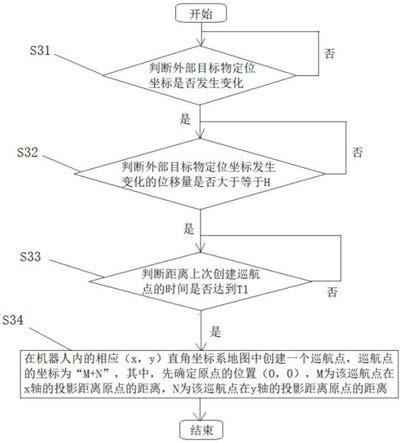
7.一种动态创建机器人巡航坐标方法,包括步骤:
8.s31.判断外部目标物定位坐标是否发生变化,如果发生变化,则执行步骤s32,否则,循环执行该步骤;
9.s32.判断外部目标物定位坐标发生变化的位移量是否大于等于h,如果外部目标物定位坐标发生变化的位移量大于等于h,则执行步骤s33,否则,循环执行该步骤;
10.s33.判断距离上次创建巡航点的时间是否达到t1,若达到t1,则执行步骤s34,否则,循环执行该步骤;
11.s34.在机器人内的相应(x,y)直角坐标系地图中创建一个巡航点,巡航点的坐标为(m,n),其中,先确定原点的位置(0,0),m为该巡航点在x轴的投影距离原点的距离,n为该巡航点在y轴的投影距离原点的距离。
12.作为优选,所述h的取值范围为0.9m~1.05m;t1的取值为4s~6s。
13.一种机器人导航方法,包括步骤:
14.s1.将同一个空间的外部目标物定位(x,y)直角坐标系地图与机器人自身扫描空间后创建的(x,y)直角坐标系地图相匹配,通过调教与测试达到外部目标物定位(x,y)直角坐标系地图与机器人(x,y)直角坐标系地图信息一致;
15.s2.将外部目标物定位坐标通过系统接口发送给机器人;
16.s3.按照以上所述的动态创建机器人巡航坐标方法自动创建巡航点;
17.s4.机器人判断2t1时间段内有没有创建新的巡航点,如果没有创建新的巡航点,则判断目标物停止移动,执行步骤s5,如果有创建新的巡航点,则判断目标物在移动,执行步骤s6;
18.s5.控制机器人向系统最后一个动态创建的巡航点移动,该巡航点为目标物所停止的位置;
19.s6.控制机器人对目标物进行跟随服务。
20.作为优选,所述步骤s6包括步骤:
21.s61.控制机器人根据t1时间段内创建巡航点的先后顺序进行移动;
22.s62.判断目标物有没有停止位移,如果目标物停止位移,则执行步骤s63;如果目标物不停止位移,则执行步骤s64;
23.s63.机器人到达目标物的停止位置后停止移动,一直到目标物继续位移再继续跟随;
24.s64.机器人巡航过程不停顿,一直沿着路线移动。
25.作为优选,在步骤s6之后,还包括步骤:
26.s7.判断目标物是否离开外部目标物定位(x,y)直角坐标系地图,如果是,则执行步骤s8,否则,循环执行该步骤;
27.s8.判断目标物离开外部目标物定位(x,y)直角坐标系地图的时间是否超过预设时间t3,如果是,则执行步骤s9,否则,循环执行该步骤;
28.s9.清理之前针对该目标物创建的巡航点,释放机器人内存。
29.作为优选,所述预设时间t3的取值范围为55min~65min。
30.作为优选,所述外部目标物定位(x,y)直角坐标系通过uwb室内定位系统、蓝牙aoa室内定位系统或视频定位确定。
31.本发明的有益效果是:
32.本方案提供的一种动态创建机器人巡航坐标方法,基本原理是机器人id下有不同的地图id,每个地图拥有自己的坐标系统,系统在地图上动态创建巡航点,创建巡航任务的时候确定巡航点到达的先后顺序。通过该方法,让机器人具有判断移动目标位置的能力,且判断过程不易出错。
33.本方案提供的一种机器人导航方法,按照配置的时间间隔(t1)自动创建机器人巡航点,将巡航点位置坐标传输至机器人自身的地图中,自动建立导航任务,驱动机器人向巡航点移动。帮助机器人判断跟随目标物的轨迹并驱动机器人进行跟随,或者帮助机器人判断移动目标物最终停留的位置并驱动机器人驶向这个位置。通过该方法机器人可以精确的判断移动目标物的位置,机器人可以向随机移动的目标物移动,对移动的目标物进行跟随服务。
附图说明
34.图1是本实施例提供的机器人导航方法的流程图;
35.图2是本实施例提供的动态创建机器人巡航坐标方法的流程图;
36.图3是本实施例提供的一种优选的机器人导航方法流程图;
37.图4是本实施例提供的控制机器人对目标物进行跟随服务的流程图。
具体实施方式
38.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
39.本发明的目的是建立一套动态创建机器人巡航坐标方法及机器人导航方法,让机器人具有判断移动目标物位置的能力。例如在会展中向不知道停在哪里的目标人送一瓶水;加油站向随机进站的车辆提供运输服务;在医院跟随盲人提供服务;商场内向不知道停在哪里的目标人送商品;医生查房的时候,需要机器人跟随运输相关医疗设备;消费者逛商场的时候租用一个机器人陪伴载货;景区的游客想召唤一个机器人到自己的位置拍照等需求,都可以通过本技术实现。本发明解决了机器人无法在特定场景下向动态目标物移动的难题。动态移动的目标物不需要等待服务机器人走到身边,而是可以继续移动,同样可以得到机器人的服务。
40.如图2所示,本实施例提供的一种动态创建机器人巡航坐标方法,基本原理是机器人id下有不同的地图id,每个地图拥有自己的坐标系统,系统在地图上动态创建巡航点,创建巡航任务的时候确定巡航点到达的先后顺序。动态创建机器人巡航坐标,通过外部系统与机器人坐标创建接口打通,进行动态创建。
41.动态创建机器人巡航坐标方法具体包括以下步骤:
42.s31.判断外部目标物定位坐标是否发生变化,如果发生变化,则执行步骤s32,否则,循环执行该步骤。
43.s32.判断外部目标物定位坐标发生变化的位移量是否大于等于h,如果外部目标物定位坐标发生变化的位移量大于等于h,则执行步骤s33,否则,循环执行该步骤。其中h的值根据具体场景的而定,可以优选为0.9m~1.05m,最优选为1m,也可以选择其它值。
44.s33.判断距离上次创建巡航点的时间是否达到t1,若达到t1,则执行步骤s34,否则,循环执行该步骤。其中t1的值根据具体场景的而定,可以优选为4s~6s,最优选为5s,也可以选择其它值。
45.s34.在机器人内的相应(x,y)直角坐标系地图中创建一个巡航点,巡航点的坐标为(m,n),其中,先确定原点的位置(0,0),m为该巡航点在x轴的投影距离原点的距离,n为该巡航点在y轴的投影距离原点的距离。例如,目标物位置发生超过1米的位移,则每5秒在系统内创建一个巡航点,巡航点的坐标为(1.05,1.8),单位是米,1.05为该巡航点在x轴的投影距离原点的距离,1.8为该巡航点在y轴的投影距离原点的距离。
46.本方案还公开了一种机器人导航方法,如图1所示,该机器人导航方法具体包括以下步骤:
47.s1.将同一个空间的外部目标物定位(x,y)直角坐标系地图与机器人自身扫描空
间后创建的(x,y)直角坐标系地图相匹配,通过调教与测试达到外部目标物定位(x,y)直角坐标系地图与机器人(x,y)直角坐标系地图信息一致。其中,所述外部目标物定位(x,y)直角坐标系优选通过uwb室内定位系统、蓝牙aoa室内定位系统或视频定位确定。但并不局限于以上方法。
48.s2.将外部目标物定位坐标通过系统接口发送给机器人。
49.s3.按照权利要求1所述的动态创建机器人巡航坐标方法自动创建巡航点。
50.s4.机器人判断2t1时间段内有没有创建新的巡航点,如果没有创建新的巡航点,则判断目标物停止移动,执行步骤s5,如果有创建新的巡航点,则判断目标物在移动,执行步骤s6。
51.s5.目标物停止位移后,控制机器人向系统最后一个动态创建的巡航点移动,该巡航点为目标物所停止的位置。
52.s6.控制机器人对目标物进行跟随服务。
53.比如当目标物从静止到发生超过1米位移,系统判定目标物开始移动;目标物2t1时间段(例如10秒)之内没有发生位移,系统判定目标物到达了近期移动目的地,机器人可以自动向目的地移动,到达指定位置之后进行服务。
54.于本实施例中,作为优选方案,如图4所示,所述步骤s6(即控制机器人对目标物进行跟随服务的流程)包括步骤:
55.s61.控制机器人根据t1时间段内创建巡航点的先后顺序进行移动。
56.s62.判断目标物有没有停止位移,如果目标物停止位移,则执行步骤s63;如果目标物不停止位移,则执行步骤s64。
57.s63.机器人到达目标物的停止位置后停止移动,一直到目标物继续位移再继续跟随。
58.s64.机器人巡航过程不停顿,一直沿着路线移动。
59.例如,要求机器人进行跟随服务,机器人根据系统内t1(例如5秒)时间段内创建巡航点的先后顺序进行移动,如果目标物没有停止位移,机器人巡航过程不停顿,一直沿着路线移动;如果目标物停止位移,机器人则到达位移点停下来静止不动,一直到目标物继续位移再继续跟随。
60.于本实施例中,作为优选方案,如图3所示,在步骤s6之后,还包括步骤:
61.s7.判断目标物是否离开外部目标物定位(x,y)直角坐标系地图,如果是,则执行步骤s8,否则,循环执行该步骤。
62.s8.判断目标物离开外部目标物定位(x,y)直角坐标系地图的时间是否超过预设时间t3,如果是,则执行步骤s9,否则,循环执行该步骤。
63.s9.清理之前针对该目标物创建的巡航点,释放机器人内存。
64.于本实施例中,作为优选方案,所述预设时间t3的取值根据具体情况而定。预设时间t3的取值范围为55min~65min,进一步优选为60min。
65.当然,以上只是本发明的典型实例,除此之外,本发明还可以有其它多种具体实施方式,凡采用等同替换或等效变换形成的技术方案,均落在本发明要求保护的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。